Файл: Методические указания по изучению разделов и тем курса Исполнительные механизмы систем управления.doc
ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 04.05.2024
Просмотров: 93
Скачиваний: 0
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
лочные электромагниты (рис. 6.1,ж) применяют в реверсивных муфтах следящих систем.
Втяжной Ш-образный электромагнит (рис. 6.1,з) применяют в автоматических приборных устройствах, работающих от сети переменного тока. П-образная конструкция (рис. 6.1,и) рассчитана на питание только от сети переменного тока. Для устранения вибраций якоря (возникающих дважды за период из-за уменьшения до нуля силы притяжения) применяют короткозамкнутые экраны в форме колец из красной меди, охватывающих часть полюсной поверхности. Сила притяжения якоря двухфазного (рис. 6.1,к) и трехфазного (рис. 6.1,л) электромагнитов остается постоянной, но точка ее приложения циклически перемещается вдоль якоря, что вызывает его вибрацию. Вибрация отсутствует полностью лишь у двухфазного сдвоенного электромагнита (рис. 6.1,м) при расположении обмоток одной фазы на крайних стержнях, а другой фазы -на средних. Втяжные электромагниты (рис. 6.1,н,о) имеют значительно больший рабочий ход, чем электромагниты с плоским якорем, но в конструктивном отношении они значительно сложнее. Поворотный функциональный магнит (рис. 6.1,п) применяют в качестве электрической пружины, характеристика которой определяется профилем ротора; дифференциальный магнит (рис. 6.1,р) - в системах управления для сравнения двух или нескольких сигналов.
60
После преобразований получим
 (3.9)
(3.9)
Решением последнего уравнения относительно неизвестного Iяxxявляются два корня:
 (3.10)
(3.10)
Выбираем наименьшее значение
Скорость вращения двигателя при холостом ходе определяется с использованием конструктивного коэффициента двигателя с.
Известно, что ЭДС обмотки якоря определяется скоростью вращения якоря , магнитным потоком Ф и конструктивным коэффициентом с [6]:
 (3.11)
(3.11)
где
Здесь а - число пар ветвей обмотки; р - число пар полюсов;
-число проводников обмотки якоря.
Преобразуя (3.3) с учетом получим
получим
 (3.12)
(3.12)
Определив , можно найти скорость вращения якоря электродвигателя при холостом ходе:
 (3.13) Номинальный вращающий момент рассчитывают по формуле
(3.13) Номинальный вращающий момент рассчитывают по формуле
 (3.14)
(3.14)
Коэффициент полезного действия двигателя определяют отношением
 (3.15)
(3.15)
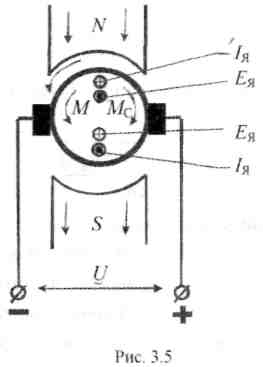
Направление тока и ЭДС в проводниках обмотки якоря двигателя можно определить из рассмотренной схемы двигателя (рис. 3.5).

33
3.3 Выбор исполнительного электродвигателя
В большинстве автоматических систем управление потоками сырья и энергии осуществляется с помощью регулирующих органов, приводимых в движение электродвигателями постоянного и переменного тока. Выбор электродвигателя определяется мощностью, необходимой для перемещения регулирующего органа или объекта управления, а также перечнем разрешенных источников питания.
В общем случае механическая нагрузка на оси регулирующего органа (оси нагрузки) характеризуется моментом трения Мн, моментом инерции Jн , частотой вращения , угловым ускорением ен. Обычно вал двигателя соединяется с нагрузкой через понижающий редуктор с передаточным числом
, угловым ускорением ен. Обычно вал двигателя соединяется с нагрузкой через понижающий редуктор с передаточным числом , тогда требуемую мощность двигателя определяют как
, тогда требуемую мощность двигателя определяют как
 (3.16)
(3.16)
а необходимый вращающий момент вычисляют по формуле
 (3.17)
(3.17)
где - момент инерции двигателя совместно с редуктором: n- КПД редуктора, который принимают равным 0,7...0,9.
Минимально необходимый вращающий момент Мвр mm имеет место при оптимальном передаточном числе редуктора
34
максимального значения; электромагниты направленного действия срабатывают при изменении знака или фазы управляющего сигнала.
6.2 Конструкции нейтральных электромагнитов
Основные типы нейтральных электромагнитов. Электромагниты П-образного типа с плоским (рис. 6.1,а) и цилиндрическим (рис. 6.1,6) якорями применяют в различных автоматических приборных устройствах для приведения в действие исполнительных механизмов и завода силовых пружин.
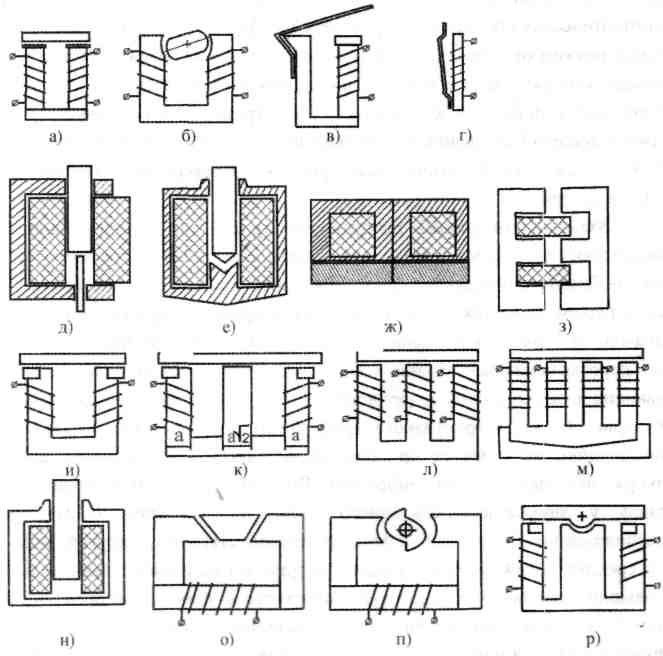
Рис. 6.1 Конструктивные разновидности нейтральных электромагнитов
Плоский якорь во избежание перекосов соединяют со штоком шар-нирно. Цилиндрический якорь и П-образный сердечник выполняют набор-
59
6 ЭЛЕКТРОМАГНИТНЫЕ ИСПОЛНИТЕЛЬНЫЕ МЕХАНИЗМЫ
6.1 Классификация и область применения
Электромагниты, применяемые в системах управления и автоматических устройствах, делят: по назначению (силовые, релейные и специальные); по току (переменный или постоянный); по потребляемой мощности (маломощные, т.е. средней мощности, т.е. мощные, т.е.
средней мощности, т.е. мощные, т.е.
 по времени срабатывания (быстродействующие, т.е.
по времени срабатывания (быстродействующие, т.е. нормальные, т.е.
нормальные, т.е. мс, замедленные, т.е.
мс, замедленные, т.е. с выдержкой
с выдержкой
времени, т.е. ), по характеру движения якоря (втяжные и поворот-
ные); по числу рабочих положений (позиций) якоря (двух- и трехпози-ционные); по габаритному объему (нормальные (50-60 см3), малогабаритные (20-30 см3), миниатюрные (5-10 см3), сверхминиатюрные (1-2 см3)); по типу магнитной системы (нейтральные и поляризованные).
В автоматических устройствах электромагниты применяют главным образом в виде реле, вибропреобразователей и различных быстродействующих удерживающих устройств. Электромагниты силового исполнения - в фрикционных муфтах, гидро- и пневмоклапанах, пускателях и других исполнительных механизмах. Силовые электромагниты характеризуют относительно большой потребляемой ю (Р = 10... 100 Вт) и нормальной скоростью срабатывания (t = 10...100 мс), релейные электромагниты - малой потребляемой мощностью (Р = 0,001 ...0,1 Вт) и высоким быстродействием (
t = 0,1-5 мс), а по габаритам относят к миниатюрным и сверхминиатюрным устройствам.
По роду управляющего сигнала все электромагниты можно разделить на нормальные, минимальные, максимальные, дифференциальные, балансные и направленного действия. Нормальные электромагниты срабатывают при токе, значение которого может изменяться в пределах допуска на значение напряжения источника; минимальные электромагниты отпускают якорь при достижении током заранее установленного минимального значения; максимальные электромагниты притягивают якорь при достижении током заранее установленного максимального значения: дифференциальные электромагниты срабатывают при наличии разности намагничивающих сил (ампервитков) обмоток, поля которых направлены встречно; балансные электромагниты срабатывают при достижении суммой витков всех обмоток заранее установленного минимального или
58
 (3.18)
(3.18)
с учетом которого находят
 (3.19)
(3.19)
Таким образом, выбор электродвигателя и передаточного числа редуктора сводится к следующему:
а) по формуле (3.16) находят необходимую мощность двигателя;
б) в справочных данных выбирают двигатель с номинатьной мощно
стью, равной или несколько больше подсчитанной;
в) по формуле (3.18) определ яют ;
г) находят по формуле (3.19) и проверяют выполнение условия
по формуле (3.19) и проверяют выполнение условия

д) проверяют двигатель по частоте вращения

Многие следящие системы рассчитывают применительно к эквивалентному синусоидальному режиму
где амплитуда А и эквивалентная частота wэ определяются но найденным экспериментально максимальной частоте вращения
Втяжной Ш-образный электромагнит (рис. 6.1,з) применяют в автоматических приборных устройствах, работающих от сети переменного тока. П-образная конструкция (рис. 6.1,и) рассчитана на питание только от сети переменного тока. Для устранения вибраций якоря (возникающих дважды за период из-за уменьшения до нуля силы притяжения) применяют короткозамкнутые экраны в форме колец из красной меди, охватывающих часть полюсной поверхности. Сила притяжения якоря двухфазного (рис. 6.1,к) и трехфазного (рис. 6.1,л) электромагнитов остается постоянной, но точка ее приложения циклически перемещается вдоль якоря, что вызывает его вибрацию. Вибрация отсутствует полностью лишь у двухфазного сдвоенного электромагнита (рис. 6.1,м) при расположении обмоток одной фазы на крайних стержнях, а другой фазы -на средних. Втяжные электромагниты (рис. 6.1,н,о) имеют значительно больший рабочий ход, чем электромагниты с плоским якорем, но в конструктивном отношении они значительно сложнее. Поворотный функциональный магнит (рис. 6.1,п) применяют в качестве электрической пружины, характеристика которой определяется профилем ротора; дифференциальный магнит (рис. 6.1,р) - в системах управления для сравнения двух или нескольких сигналов.
60
После преобразований получим
Решением последнего уравнения относительно неизвестного Iяxxявляются два корня:
Выбираем наименьшее значение
Скорость вращения двигателя при холостом ходе определяется с использованием конструктивного коэффициента двигателя с.
Известно, что ЭДС обмотки якоря определяется скоростью вращения якоря , магнитным потоком Ф и конструктивным коэффициентом с [6]:
где
Здесь а - число пар ветвей обмотки; р - число пар полюсов;
-число проводников обмотки якоря.
Преобразуя (3.3) с учетом
Определив , можно найти скорость вращения якоря электродвигателя при холостом ходе:
Коэффициент полезного действия двигателя определяют отношением
Направление тока и ЭДС в проводниках обмотки якоря двигателя можно определить из рассмотренной схемы двигателя (рис. 3.5).
33
3.3 Выбор исполнительного электродвигателя
В большинстве автоматических систем управление потоками сырья и энергии осуществляется с помощью регулирующих органов, приводимых в движение электродвигателями постоянного и переменного тока. Выбор электродвигателя определяется мощностью, необходимой для перемещения регулирующего органа или объекта управления, а также перечнем разрешенных источников питания.
В общем случае механическая нагрузка на оси регулирующего органа (оси нагрузки) характеризуется моментом трения Мн, моментом инерции Jн , частотой вращения
а необходимый вращающий момент вычисляют по формуле
где - момент инерции двигателя совместно с редуктором: n- КПД редуктора, который принимают равным 0,7...0,9.
Минимально необходимый вращающий момент Мвр mm имеет место при оптимальном передаточном числе редуктора
34
максимального значения; электромагниты направленного действия срабатывают при изменении знака или фазы управляющего сигнала.
6.2 Конструкции нейтральных электромагнитов
Основные типы нейтральных электромагнитов. Электромагниты П-образного типа с плоским (рис. 6.1,а) и цилиндрическим (рис. 6.1,6) якорями применяют в различных автоматических приборных устройствах для приведения в действие исполнительных механизмов и завода силовых пружин.
Рис. 6.1 Конструктивные разновидности нейтральных электромагнитов
Плоский якорь во избежание перекосов соединяют со штоком шар-нирно. Цилиндрический якорь и П-образный сердечник выполняют набор-
59
6 ЭЛЕКТРОМАГНИТНЫЕ ИСПОЛНИТЕЛЬНЫЕ МЕХАНИЗМЫ
6.1 Классификация и область применения
Электромагниты, применяемые в системах управления и автоматических устройствах, делят: по назначению (силовые, релейные и специальные); по току (переменный или постоянный); по потребляемой мощности (маломощные, т.е.
времени, т.е. ), по характеру движения якоря (втяжные и поворот-
ные); по числу рабочих положений (позиций) якоря (двух- и трехпози-ционные); по габаритному объему (нормальные (50-60 см3), малогабаритные (20-30 см3), миниатюрные (5-10 см3), сверхминиатюрные (1-2 см3)); по типу магнитной системы (нейтральные и поляризованные).
В автоматических устройствах электромагниты применяют главным образом в виде реле, вибропреобразователей и различных быстродействующих удерживающих устройств. Электромагниты силового исполнения - в фрикционных муфтах, гидро- и пневмоклапанах, пускателях и других исполнительных механизмах. Силовые электромагниты характеризуют относительно большой потребляемой ю (Р = 10... 100 Вт) и нормальной скоростью срабатывания (t = 10...100 мс), релейные электромагниты - малой потребляемой мощностью (Р = 0,001 ...0,1 Вт) и высоким быстродействием (
t = 0,1-5 мс), а по габаритам относят к миниатюрным и сверхминиатюрным устройствам.
По роду управляющего сигнала все электромагниты можно разделить на нормальные, минимальные, максимальные, дифференциальные, балансные и направленного действия. Нормальные электромагниты срабатывают при токе, значение которого может изменяться в пределах допуска на значение напряжения источника; минимальные электромагниты отпускают якорь при достижении током заранее установленного минимального значения; максимальные электромагниты притягивают якорь при достижении током заранее установленного максимального значения: дифференциальные электромагниты срабатывают при наличии разности намагничивающих сил (ампервитков) обмоток, поля которых направлены встречно; балансные электромагниты срабатывают при достижении суммой витков всех обмоток заранее установленного минимального или
58
с учетом которого находят
Таким образом, выбор электродвигателя и передаточного числа редуктора сводится к следующему:
а) по формуле (3.16) находят необходимую мощность двигателя;
б) в справочных данных выбирают двигатель с номинатьной мощно
стью, равной или несколько больше подсчитанной;
в) по формуле (3.18) определ яют ;
г) находят
д) проверяют двигатель по частоте вращения
Многие следящие системы рассчитывают применительно к эквивалентному синусоидальному режиму
где амплитуда А и эквивалентная частота wэ определяются но найденным экспериментально максимальной частоте вращения