Файл: Методические указания по изучению разделов и тем курса Исполнительные механизмы систем управления.doc
ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 04.05.2024
Просмотров: 94
Скачиваний: 0
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
п - число неизвестных магнитных потоков. Решением системы должны быть аналитические зависимости искомых магнитных потоков в функции от величин намагничивающей силы Fисточника поля и других эквивалентных параметров схемы замещения.
Определив в общем виде величину магнитного потока в рабочем зазоре Фз, найти падение магнитного напряжения F3, на проводимости зазора Gпри или
или . На данном этапе расчет производят только в общем
. На данном этапе расчет производят только в общем
виде без подстановки численных значений эквивалентных параметров.
Расчет тягового усилия или вращающего момента электромагнита
Целью расчета является определение величины намагничивающей силы Fисточника поля, необходимой для обеспечения необходимого тягового усилия Рнили момента Мн.
Воспользовавшись данными задания по тяговому усилию Рнили моменту Мни аналитическими выражениями (таблица 6.1), рассчитать величины Фн или Fн, необходимые для обеспечения Рнили Мнпри или а = ан Выбор аналитического выражения из таблицы производить в соответствии с эскизом конфигурации рабочего зазора электромагнита. Здесь - эквивалентно X, используемому в таблице 6.1 для обозначения перемещения якоря.
или а = ан Выбор аналитического выражения из таблицы производить в соответствии с эскизом конфигурации рабочего зазора электромагнита. Здесь - эквивалентно X, используемому в таблице 6.1 для обозначения перемещения якоря.
Тяговые усилия или моменты, создаваемые намагничивающей силой FH в зазоре, определяются выражениями:
где k1,k2- функции
, соответственно, определяем их из таблицы 6.1
для заданной конфигурации полюсных поверхностей магнитной системы электромагнита.
Приравнивая найденные численные значения FH выражениям для F3, соответственно определить необходимые значения намагничивающей силы Fисточника магнитного поля.
74
В коллекторных машинах постоянного тока на роторе кроме магни-топровода и обмотки размещается коллектор. Коллектор - это устройство, к которому подсоединяются все катушки обмотки ротора и которое служит для преобразования переменного тока в постоянный и наоборот. Конструктивно коллектор выполняется в виде цилиндра, набранного из медных пластин, изолированных друг относительно друга. Напряжение подается или снимается с коллектора с помощью графитовых щеток, закрепленных на статоре и скользящих по поверхности коллектора (скользящий контакт).
Окончание табл. 6.4
2 ПРОГРАММА КУРСА И МЕТОДИЧЕСКИЕ
УКАЗАНИЯ ПО ИЗУЧЕНИЮ
ЕГО РАЗДЕЛОВ И ТЕМ
2.1 Исполнительные механизмы на базе электропривода постоянного тока
2.1.1 Конструкция, принцип работы и характеристики исполни
тельных двигателей постоянного тока.
2.1.2 Непрерывный способ регулирования скорости исполни
тельных двигателей постоянного тока.

Комплектные электроприводы постоянного тока.
При изучении исполнительных двигателей необходимо сравнить их характеристики при якорном и полюсном управлениях, показать преимущество якорного управления. Для характеристики динамических свойств двигателей требуется анализ переходных процессов и передаточных функций. Важно также уяснить влияние реакции якоря на снижение величины результирующего магнитного потока машины и ЭДС якоря. Необходимо обратить внимание на физическую картину протекания процесса коммутации, знать ее основные виды и способы улучшения. Нужно уяснить рабочие свойства генераторов и двигателей, уметь анализировать их характеристики [1-3,6, 20,21].
2.2 Исполнительные механизмы на базе асинхронного электропривода
2.2.6 Регулирование скорости исполнительных асинхронных
микродвигателей.
20
Расчет магнитных потоков в участках магнитной системы
электромагнита
Целью расчета является нахождение величин магнитных потоков во всех участках магнитной системы электромагнита, представленной схемой замещения магнитной цепи.
73
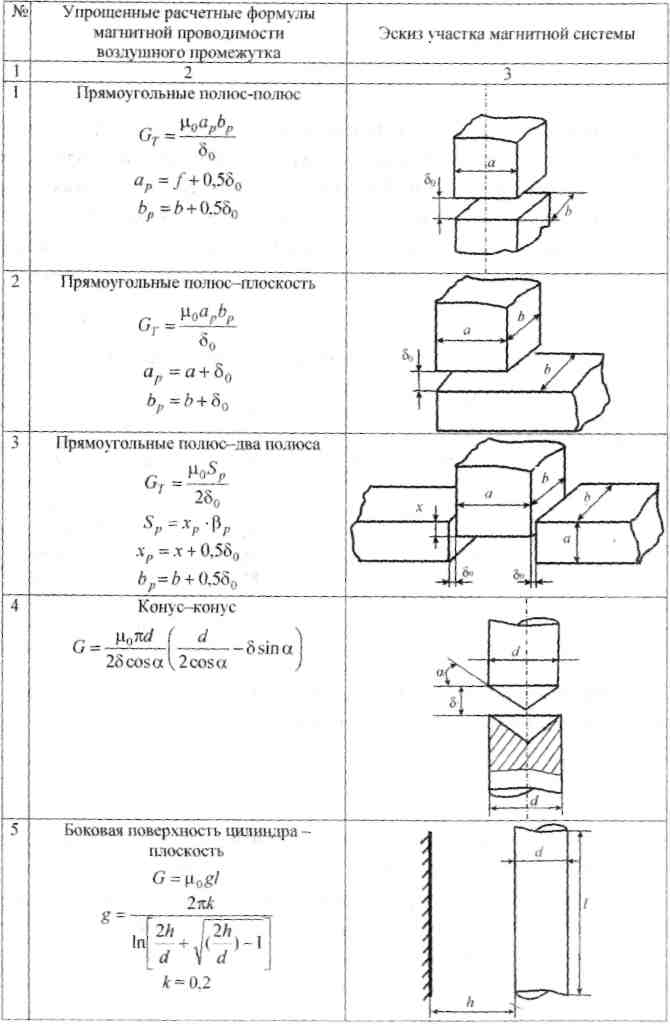
Таблица 6.4
В машинах переменного тока имеет место вращающееся магнитное поле. Необходимо усвоить принципы образования этого поля посредством пульсирующих полей, создаваемых отдельными фазными обмотками.
Рабочий процесс асинхронной машины приводится к рабочему процессу трансформатора, что позволяет применять в теории асинхронных машин методы, разработанные в теории трансформаторов: приведение величин параметров ротора к параметрам статора, схему замещения, векторные диаграммы. Необходимо знать основные способы регулирования скорости асинхронных трехфазных двигателей.
При изучении однофазных асинхронных двигателей нужно обратить внимание на меры, с помощью которых образуется пусковой момент, а для асинхронных исполнительных двигателей важны требования, предъявляемые к ним: условия отсутствия «самохода», механические и регулировочные характеристики, способы управления и передаточную функцию.
При изучении тепловых процессов электродвигателей автоматики обратить внимание на физический смысл постоянных времени нагрева и охлаждения, методы проверки двигателя на нагрев, области применения двигателей различных типов в зависимости от мощности и функций исполнительного механизма. При этом следует уметь осуществлять выбор двигателя для конкретных условий работы в системах управления [1-3, 6,15, 18,20,21].
2.3 Исполнительные механизмы на базе электропривода с шаговыми двигателями
2.3.1 Конструкция, принцип работы и характеристики синхронного шагового двигателя.
2.3^2 Особенности конструкции и принципа работы линейного шагового двигателя.
2.3.3 Системы разомкнутого дискретного привода с шаговым двигателем.
Нужно изучить, как в шаговых двигателях создается вращающий момент в процессе пуска и при синхронной скорости вращения, изучить принцип преобразования импульсных команд в угол поворота при различных конструктивных и схемных решениях шаговых двигателей.
Необходимо уяснить основные характеристики шаговых двигателей и научиться их использовать в практических целях [1,2, 6-9, 20J.
72
2.4 Исполнительные механизмы на базе электропривода с асинхронным двигателем
При изучении теории синхронных машин необходимо обратить внимание на реакцию якоря, уяснить влияние на нее характера нагрузки, усвоить образование электромагнитной мощности и электромагнитного момента, сопровождающееся проявлением различной проводимости магнитной цепи по продольной и поперечной осям. Последнее указание важно при анализе рабочего процесса реактивных синхронных двигателей. Необходимо рассмотреть асинхронный пуск, который применяется как для обычных синхронных двигателей, так и для реактивных микродвигателей.
Нужно усвоить, как в гистерезисньгх двигателях создается вращающий момент в процессе пуска и при синхронной скорости вращения, изучить принципы преобразования импульсных команд в угол поворота при различных конструктивных и схемных решениях шаговых (импульсных) двигателей, принцип синхронизации питающих импульсов, подаваемых в обмотки якоря вентильных бесконтактных двигателей [6, 9. 20].
2.5 Электромашинные измерительно-преобразовательные
устройства для исполнительных механизмов
с обратной связью
Одним из основных параметров, определяющих работу синхронной передачи, является угол рассогласования между роторами сельсина-датчика и сельсина-приемника. Нужно знать зависимость ЭДС, токов и моментов сельсинов от угла рассогласования, их статические характеристики, уметь их анализировать. Рекомендуется сравнить работ)' синхронной передачи в индикаторном и трансформаторном режимах.
В вращающихся поворотных трансформаторах надо хорошо усвоить зависимости и операции, которые могут быть получены при их применении
22
Значение магнитного сопротивления сердечника рассчитывается по
формуле
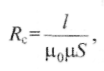
где l - длина сердечника вдоль направления магнитного потока Ф; ц - относительная магнитная проницаемость материала сердечника; мо - магнитная постоянная, ; S - площадь сечения сердечника в плоскости
; S - площадь сечения сердечника в плоскости
перпендикулярной потоку Ф, (рис. 6.6,а) и(рис.
(рис. 6.6,а) и(рис. 6.6,б).
6.6,б).
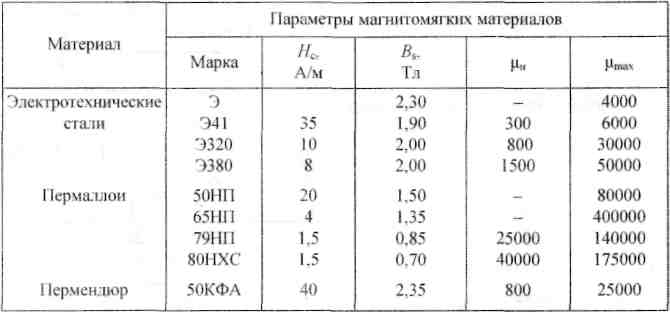
Значение ц выбирается из таблицы 6.3 параметров магнитомягких материалов в зависимости от марки примененного материала сердечника.
Таблица 6.3
Магнитное сопротивление /-го участка магнитопровода рассчитывается аналогично сопротивлению сердечника

где /, - длина /-го участка магнитопровода вдоль направления магнитного потока Ф; S, - площадь поперечного сечения /-го участка магнитопровода
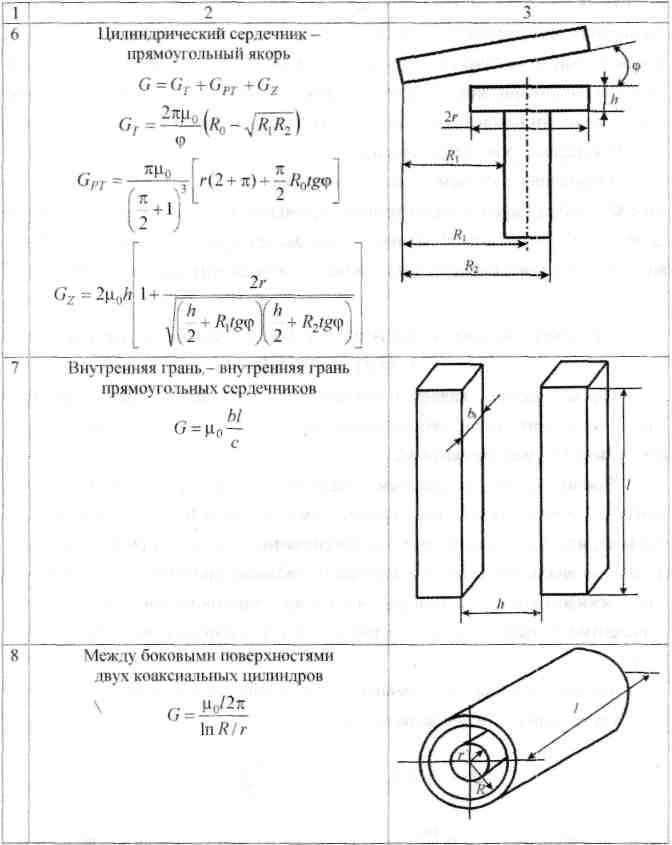
Наибольшую сложность представляет собой расчет магнитных про-водимостей воздушных рабочих зазоров магнитной системы и магнитных проводимостей потоков утечки. Ниже в (таблице 6.4) приведена сводка основных расчетных формул для магнитных проводимостей воздушных промежутков различных форм.
 или
или где и изменяются в интервалах
где и изменяются в интервалах

Определив в общем виде величину магнитного потока в рабочем зазоре Фз, найти падение магнитного напряжения F3, на проводимости зазора Gпри
виде без подстановки численных значений эквивалентных параметров.
Расчет тягового усилия или вращающего момента электромагнита
Целью расчета является определение величины намагничивающей силы Fисточника поля, необходимой для обеспечения необходимого тягового усилия Рнили момента Мн.
Воспользовавшись данными задания по тяговому усилию Рнили моменту Мни аналитическими выражениями (таблица 6.1), рассчитать величины Фн или Fн, необходимые для обеспечения Рнили Мнпри
Тяговые усилия или моменты, создаваемые намагничивающей силой FH в зазоре, определяются выражениями:
где k1,k2- функции
, соответственно, определяем их из таблицы 6.1
для заданной конфигурации полюсных поверхностей магнитной системы электромагнита.
Приравнивая найденные численные значения FH выражениям для F3, соответственно определить необходимые значения намагничивающей силы Fисточника магнитного поля.
74
В коллекторных машинах постоянного тока на роторе кроме магни-топровода и обмотки размещается коллектор. Коллектор - это устройство, к которому подсоединяются все катушки обмотки ротора и которое служит для преобразования переменного тока в постоянный и наоборот. Конструктивно коллектор выполняется в виде цилиндра, набранного из медных пластин, изолированных друг относительно друга. Напряжение подается или снимается с коллектора с помощью графитовых щеток, закрепленных на статоре и скользящих по поверхности коллектора (скользящий контакт).
Окончание табл. 6.4
2 ПРОГРАММА КУРСА И МЕТОДИЧЕСКИЕ
УКАЗАНИЯ ПО ИЗУЧЕНИЮ
ЕГО РАЗДЕЛОВ И ТЕМ
2.1 Исполнительные механизмы на базе электропривода постоянного тока
2.1.1 Конструкция, принцип работы и характеристики исполни
тельных двигателей постоянного тока.
2.1.2 Непрерывный способ регулирования скорости исполни
тельных двигателей постоянного тока.
-
Импульсный способ регулирования скорости исполнительных двигателей постоянного тока. - 1 2 3 4 5 6 7 8 9
Комплектные электроприводы постоянного тока.
При изучении исполнительных двигателей необходимо сравнить их характеристики при якорном и полюсном управлениях, показать преимущество якорного управления. Для характеристики динамических свойств двигателей требуется анализ переходных процессов и передаточных функций. Важно также уяснить влияние реакции якоря на снижение величины результирующего магнитного потока машины и ЭДС якоря. Необходимо обратить внимание на физическую картину протекания процесса коммутации, знать ее основные виды и способы улучшения. Нужно уяснить рабочие свойства генераторов и двигателей, уметь анализировать их характеристики [1-3,6, 20,21].
2.2 Исполнительные механизмы на базе асинхронного электропривода
-
Конструкция, принцип работы и характеристики трехфазного асинхронного двигателя. -
Унифицированные исполнительные механизмы с нерегулируемыми трехфазными и однофазными асинхронными двигателями. -
Регулирование скорости трехфазного асинхронного двигателя изменением частоты напряжения питания. -
Комплектные электроприводы на основе трехфазных асинхронных двигателей с частотным управлением. -
Конструкция, принцип действия и характеристики асинхронных микродвигателей.
2.2.6 Регулирование скорости исполнительных асинхронных
микродвигателей.
20
Расчет магнитных потоков в участках магнитной системы
электромагнита
Целью расчета является нахождение величин магнитных потоков во всех участках магнитной системы электромагнита, представленной схемой замещения магнитной цепи.
73
Таблица 6.4
В машинах переменного тока имеет место вращающееся магнитное поле. Необходимо усвоить принципы образования этого поля посредством пульсирующих полей, создаваемых отдельными фазными обмотками.
Рабочий процесс асинхронной машины приводится к рабочему процессу трансформатора, что позволяет применять в теории асинхронных машин методы, разработанные в теории трансформаторов: приведение величин параметров ротора к параметрам статора, схему замещения, векторные диаграммы. Необходимо знать основные способы регулирования скорости асинхронных трехфазных двигателей.
При изучении однофазных асинхронных двигателей нужно обратить внимание на меры, с помощью которых образуется пусковой момент, а для асинхронных исполнительных двигателей важны требования, предъявляемые к ним: условия отсутствия «самохода», механические и регулировочные характеристики, способы управления и передаточную функцию.
При изучении тепловых процессов электродвигателей автоматики обратить внимание на физический смысл постоянных времени нагрева и охлаждения, методы проверки двигателя на нагрев, области применения двигателей различных типов в зависимости от мощности и функций исполнительного механизма. При этом следует уметь осуществлять выбор двигателя для конкретных условий работы в системах управления [1-3, 6,15, 18,20,21].
2.3 Исполнительные механизмы на базе электропривода с шаговыми двигателями
2.3.1 Конструкция, принцип работы и характеристики синхронного шагового двигателя.
2.3^2 Особенности конструкции и принципа работы линейного шагового двигателя.
2.3.3 Системы разомкнутого дискретного привода с шаговым двигателем.
Нужно изучить, как в шаговых двигателях создается вращающий момент в процессе пуска и при синхронной скорости вращения, изучить принцип преобразования импульсных команд в угол поворота при различных конструктивных и схемных решениях шаговых двигателей.
Необходимо уяснить основные характеристики шаговых двигателей и научиться их использовать в практических целях [1,2, 6-9, 20J.
72
2.4 Исполнительные механизмы на базе электропривода с асинхронным двигателем
-
Конструкция, принцип действия и характеристики синхронных двигателей (синхронные реактивные, с активным ротором, гистерезисные). -
Особенности конструкций и принципы управления синхронными двигателями.
При изучении теории синхронных машин необходимо обратить внимание на реакцию якоря, уяснить влияние на нее характера нагрузки, усвоить образование электромагнитной мощности и электромагнитного момента, сопровождающееся проявлением различной проводимости магнитной цепи по продольной и поперечной осям. Последнее указание важно при анализе рабочего процесса реактивных синхронных двигателей. Необходимо рассмотреть асинхронный пуск, который применяется как для обычных синхронных двигателей, так и для реактивных микродвигателей.
Нужно усвоить, как в гистерезисньгх двигателях создается вращающий момент в процессе пуска и при синхронной скорости вращения, изучить принципы преобразования импульсных команд в угол поворота при различных конструктивных и схемных решениях шаговых (импульсных) двигателей, принцип синхронизации питающих импульсов, подаваемых в обмотки якоря вентильных бесконтактных двигателей [6, 9. 20].
2.5 Электромашинные измерительно-преобразовательные
устройства для исполнительных механизмов
с обратной связью
-
Сельсины - конструкция, принцип работы и характеристики. -
Вращающиеся (поворотные) трансформаторы. -
Асинхронные тахогенераторы. -
Тахогенераторы постоянного тока.
Одним из основных параметров, определяющих работу синхронной передачи, является угол рассогласования между роторами сельсина-датчика и сельсина-приемника. Нужно знать зависимость ЭДС, токов и моментов сельсинов от угла рассогласования, их статические характеристики, уметь их анализировать. Рекомендуется сравнить работ)' синхронной передачи в индикаторном и трансформаторном режимах.
В вращающихся поворотных трансформаторах надо хорошо усвоить зависимости и операции, которые могут быть получены при их применении
22
Значение магнитного сопротивления сердечника рассчитывается по
формуле
где l - длина сердечника вдоль направления магнитного потока Ф; ц - относительная магнитная проницаемость материала сердечника; мо - магнитная постоянная,
перпендикулярной потоку Ф,
Значение ц выбирается из таблицы 6.3 параметров магнитомягких материалов в зависимости от марки примененного материала сердечника.
Таблица 6.3
Магнитное сопротивление /-го участка магнитопровода рассчитывается аналогично сопротивлению сердечника
где /, - длина /-го участка магнитопровода вдоль направления магнитного потока Ф; S, - площадь поперечного сечения /-го участка магнитопровода
Наибольшую сложность представляет собой расчет магнитных про-водимостей воздушных рабочих зазоров магнитной системы и магнитных проводимостей потоков утечки. Ниже в (таблице 6.4) приведена сводка основных расчетных формул для магнитных проводимостей воздушных промежутков различных форм.