Файл: Методические указания по изучению разделов и тем курса Исполнительные механизмы систем управления.doc
ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 04.05.2024
Просмотров: 76
Скачиваний: 0
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.

Теоремы подобия позволяют легко рассчитывать варианты данной магнитной системы, отличающиеся от нее лишь масштабом. При этом все параметры исходной магнитной системы считаются известными.
6.6 Методика расчета электромагнитов постоянного тока
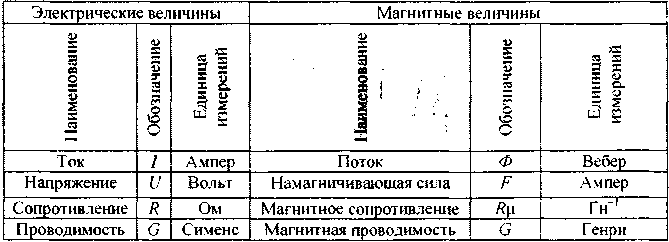
В основу методики расчета положены методы теории цепей и законы Ома и Кирхгофа для магнитных цепей. В таблице 6.2 приведены основные величины - аналоги, используемые в расчетах электрических и магнитных цепей.
66
Таблица 6.2
В цепь якоря может быть включено добавочное сопротивление Rд, например, пусковой реостат. Для регулирования тока возбуждения в цепь обмотки возбуждения ОВ может быть включен регулировочный реостат Rр.
Принцип работы двигателя постоянного тока основан на электромагнитном взаимодействии неподвижного магнитного потока возбуждения Ф с током lя, протекающим по обмотке якоря. На каждый из проводников с током действует электромагнитная сила и создается результирующий электромагнитный момент
где k- конструктивный коэффициент, зависящий от конструктивных
параметров машины. Этот момент заставляет ротор вращаться, направления момента и скорости совпадают.
При вращении проводников якоря в поле возбуждения: в каждом из них наводится ЭДС вращения и с щеток снимается результирующая ЭДС обмотки якоря:
где со - угловая скорость якоря. В режиме двигателя эта ЭДС направлена навстречу току якоря.
Механические характеристики. Механическая характеристика двигателя - это зависимость электромагнитного момента, развиваемого двигателем, от угловой скорости ротора. Механические характеристики двигателей принято подразделять на естественные и искусственные.
Естественная характеристика соответствует номинальному напряжению питания и отсутствию добавочных сопротивлений в цепях обмоток двигателя. Если хотя бы одно из перечисленных условий не выполняется, характеристика называется искусственной.
Уравнение механической характеристики может быть
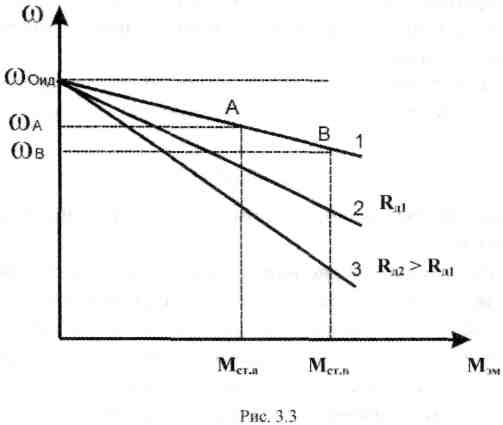
найдено из уравнения равновесия ЭДС и напряжений для якорной цепи двигателя (рис. 3.3), записанного на основании второго закона. Кирхгофа:
(3 .3)
где Rя- активное сопротивление якоря.
Преобразуя (3.3) с учетом (3.1) и (3.2), получим уравнение механической характеристики
27
Это уравнение можно представить в виде
Семейство механических характеристик при номинальном напряжении на якоре и потоке возбуждения и различных добавочных сопротивлениях в цепи якоря изображено на рис. 3.3.
Механические характеристики двигателей принято оценивать по трем показателям: устойчивость, жесткость и линейность.
Естественная механическая характеристика, соответствующая (3.4) при Rд = 0, изображена прямой линией 1. Механическая характеристика линейная; небольшое отклонение от линейного закона может быть вызвано потоком якоря, создаваемым током якоря и приводящим к изменению результирующего потока Ф. Эта характеристика жесткая, т.к. при изменении момента нагрузки и соответственно скорости поток возбуждения не изменяется. Жесткость характеристики уменьшается при введении добавочного сопротивления в цепь якоря (прямые линии 2 и 3 - искусственные реостатные характеристики). Характеристики устойчивые, т.е. двигатель автома-

28
65
Окончание табл. 6.1
64
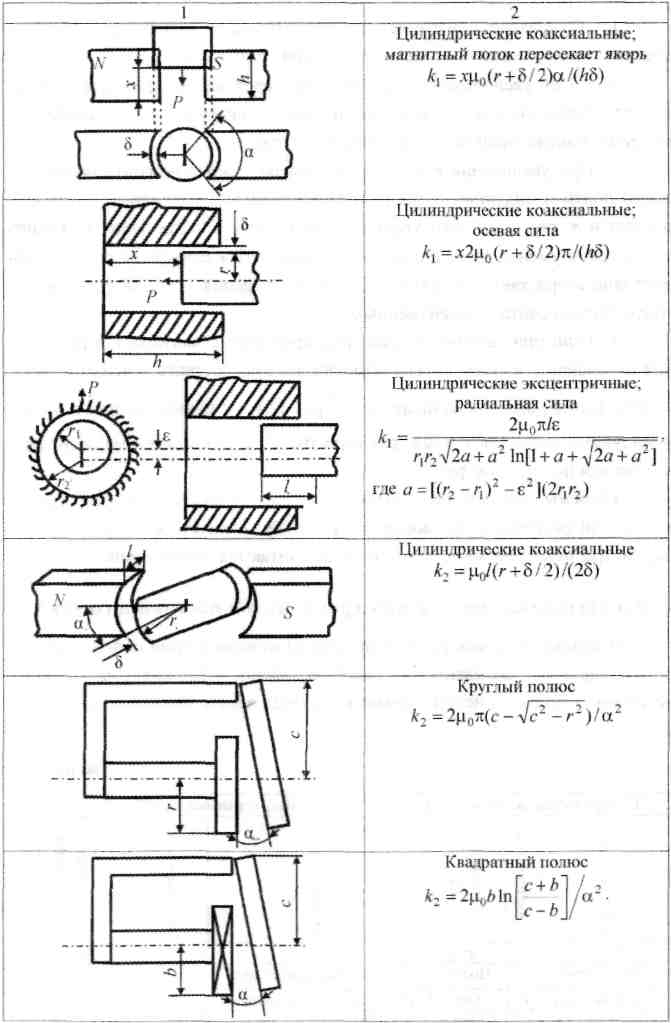
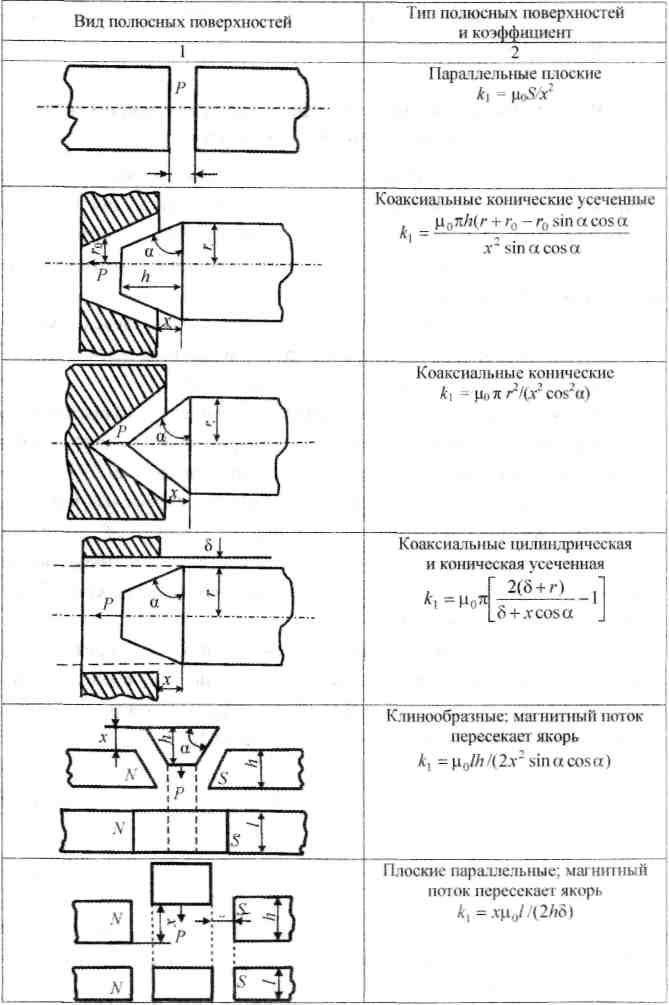
Таблица 6.1 Коэффициенты формул тягового усилия и вращающего момента
тически возвращается в исходную точку характеристики после снятия возмущения. Формальным признаком устойчивости является знак производной на устойчивом участке характеристики производная должна быть отрицательной.
Увеличение статического момента сопротивления на валу двигателя приводит к уменьшению угловой частоты и ЭДС якоря. Ток якоря, выражение для которого можно записать на основании (3.3)
возрастает. Соответственно растет электромагнитный момент
Регулирование скорости. Угловую скорость двигателя при неизменном моменте сопротивления можно регулировать (см. (3.4)) тремя способами:
-
якорным - изменением напряжения на обмотке якоря Uя; -
полюсным - изменением магнитного потока возбуждения Ф;
-
реостатным - изменением добавочного сопротивления Rдв цепи якоря.
Регулировочные характеристики двигателей независимого возбуждения при якорном управлении будут рассмотрены в следующих разделах. При этом возможны два основных вида управления:
-
непрерывное - изменением во времени амплитуды напряжения; -
импульсное - изменением времени, в течение которого к двигателю подводится номинальное напряжение.
Полюсное управление применяется гораздо реже якорного, т.к. регулировочные характеристики получаются нелинейными и цепь управления обладает значительной индуктивностью, что может отрицательно сказаться на быстродействии. Преимуществом полюсного управления является значительно меньший ток возбуждения по сравнению с током якоря и, соответственно, меньшая мощность управления.
При реостатном способе через реостаты Rд(см. рис. 3.2) должен длительно пропускаться значительный ток, что вызывает большие потери мощности. Способ не обеспечивает широкого диапазона регулирования скорости, он неэкономичен и в системах автоматического управления при
меняется крайне редко.
Пуск. Пуск двигателя постоянного тока осложняется тем, что при
вышать номинальный ток, что опасно как для двигателя (усиление искре-
29
ния, динамические перегрузки), так и для источника питания. Поэтому важнейшими показателями пускового режима являются кратность пускового тока
Прямой пуск применяют обычно при кратности пускового тока
Реверсирование. Реверсирование двигателя осуществляется либо изменением полярности напряжения на обмотке якоря, либо на обмотке возбуждения. В обоих случаях изменяется знак момента двигателя
соответственно, направление вращения ротора.
Торможение. У двигателей независимого возбуждения возможны три тормозных режима:
-
рекуперативное торможение - перевод двигателя в режим генератора, работающего параллельно с сетью, -
торможение противовключением - за счет изменения направления тока якоря или потока возбуждения,
- динамическое - перевод двигателя в режим автономного генератора.
У двигателей исполнительных устройств применяется в основном
торможение противовключением или динамическое.
Бесконтактные двигатели постоянного тока. Коллекторные двигатели постоянного тока обладают хорошими регулировочными свойствами и экономичны, но наличие скользящего контакта коллектор-щетки ограничивает область их применения.
В настоящее время в связи с развитием силовой полупроводниковой электроники появились и начали получать все более широкое распространение бесконтактные двигатели постоянного тока. При замене механического коммутатора - коллектора с щетками-полупроводниковым коммутатором двигатель постоянного тока становится более надежным и долговечным, создает меньше радиопомех, особенно при высоких частотах вращения, когда очень быстро изнашиваются щетки и значительно увеличиваются искрение и радиопомехи.
Конструтция. В отличие от обычного коллекторного двигателя, бесконтактный двигатель постоянного тока обладает рядом характерных особенностей.
30
управляющей обмотки. При выключенной обмотке поток постоянного магнита замыкается в основном через якорь. Включение тока увеличивает магнитное сопротивление цепи якоря, и поток постоянного магнита начинает замыкаться через шунт.
6.4 Расчетные формулы для определения тягового усилия и вращающего момента
Тяговое усилие Р и вращающий момент М как нейтрального, так и поляризованного электромагнита нужно рассчитывать по общим энергетическим формулам: