ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 19.07.2024
Просмотров: 252
Скачиваний: 1

СОДЕРЖАНИЕ
1. Основные понятия и определения
Глава 2. Первичные преобразователи
6. Фотоэлектрические первичные
Глава 3. Усилители и стабилизаторы
Глава 4. Переключающие устройства и распределители
Глава 5. Задающие и исполнительные устройства
Глава 6. Общие сведения об измерении и контроле
Глава 8. Контроль давления и разрежения
Глава 9. Контроль расхода, количества и уровня
Глава 12. Автоматическая блокировка и защита в системах управления
Глава 13. Системы автоматического контроля и сигнализации
Глава 14. Системы автоматического
Глава 15. Объекты регулирования и их свойства
Глава 17. Конструкции и характеристики регуляторов
Глава 18. Общая характеристика
Глава 19. Математическое и программное обеспечение микроЭвм
Глава 20. Внешние устройства микроЭвм
Глава 21. Применение микропроцессорных систем
Глава 23. Конструкции промышленных роботов
Глава 25. Роботизация промышленного производства
Изменение мощности и регулируемой температуры во времени при двухпозиционном регулировании температуры печи показано на рис. 129. Величины и определяют возможные стабильные температуры печи, соответствующие длительному включению нагревательных элементов с мощностями N1 и соответственно. Значения мощностей выбраны таким образом, чтобы заданная температура 4ад находилась в интервале температур Ь и
Основные параметры такого процесса могут быть определены по приближенной формуле
т ^1 + ЛГ2 Т ’
где — отклонение температуры от заданного значения,°С;
209
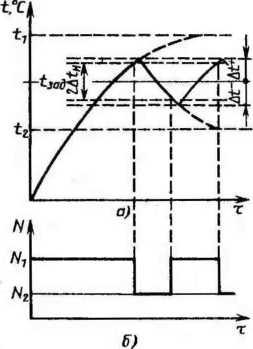
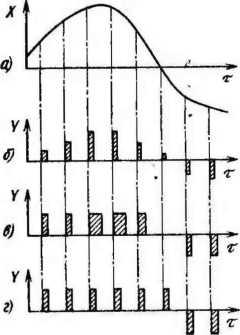 Рис.
129. Изменение при дпухпозйци- Рис. 130.
Графическое изображение онном
регулировании: действия импульсного
регулятора
Рис.
129. Изменение при дпухпозйци- Рис. 130.
Графическое изображение онном
регулировании: действия импульсного
регулятора
а — температуры; б — мощности
Л/, и Л/а — мощности нагревательных элементов, кВт; тц — время запаздывания, с; Г — постоянная времени объекта, с.
Как видно из формулы, колебания регулируемой температуры уменьшаются при уменьшении регулируемой мощности Л/]. — ЛГа, времени запаздывания тц и увеличении постоянной времени объекта Т.
Уменьшение регулируемой МОЩНОСТИ Ыг — Л* вызывает сближение температур 1Х и /2 до заданной температуры /аад.
В тех случаях, когда не требуется высокая точность регулирования, мощность Л/2 можно принимать равной нулю, а мощность N! — равной максимальной мощности, т. е. регулировать по принципу включено-выключено.
Колебание температуры снижается при уменьшении времени полного запаздывания тц. Здесь под запаздыванием понимается не только время запаздывания объекта, но и время запаздывания самого регулятора. Следовательно, колебания температуры могут быть уменьшены путем выбора регулятора с меньшим диапазоном нечувствительности 2Д/Н-
Колебание температуры уменьшается при увеличении постоянной времени объекта Т. Поэтому чем больше емкость объекта, тем благоприятнее осуществляется двухпозиционное регулирование.
Одним из основных недостатков двухпозиционного регулирования является невозможность сочетания быстрого нагрева (для этого необходима большая мощность) и высокой точности регулирования, для которой требуется небольшая избыточная мощность.
Дальнейшее развитие позиционного регулирования пошло в двух направлениях: улучшение свойств двухпозиционного регулирования и переход на трехпозиционное регулирование. Первое направление обеспечивается созданием так называемого прерывистого двухпозиционного регулирования, т. е. введением дополнительных импульсов по первой и второй производным и применение^ экспоненциальных обратных связей. При введении трехпозиционного регулирования колебания регулируемого параметра уменьшаются на 20 ... 30 % по сравнению с колебаниями при двухпозиционном регулировании.
В трехпозиционных регуляторах регулирующий орган может занимать дополнительно еще среднее положение, обеспечивающее подачу энергии нли вещества в объект в количествах, соответствующих его потреблению при нормальной нагрузке и заданном значении регулируемой величины. Таким образом, в трехпозиционных регуляторах включение и выключение мощности осуществляется также ступенчато, но имеется некоторая зависимость между отклонением регулируемой величины от заданного значения и включаемой мощностью. Трехпозиционные регуляторы способны вести регулирование более качественно, чем двухпозиционные.
Позиционные автоматические регуляторы применяются главным образом для регулирования температуры в электрических термических печах.
В регуляторах импульсного действия отклонения регулируемой величины (рис. 130, а) преобразуются в последовательность импульсов, следующих друг за другом через определенные интервалы времени. Импульсы могут отличаться амплитудой, длительностью и полярностью.
В зависимости от характеристики импульсов рассматриваемые регуляторы подразделяются на три группы. К первой группе относятся регуляторы, в которых амплитуда импульсов пропорциональна изменению регулируемой величины (рис. 130, б). Во вторую группу входят регуляторы с преобразованием регулируемой величины в последовательность импульсов, длительность которых зависит от отклонения регулируемой величины (рис. 130,в). Импульсные регуляторы с преобразованием отклонения регулируемой величины в последовательность импульсов с постоянными амплитудами и длительностью, но с переменным знаком, относятся к третьей группе (рис. 130, г). Знак импульсов зависит от изменения знака регулируемой величины. Импульсные регуляторы применяются для регулирования медленно протекающих процессов в объектах регулирования, обладающих большой инерционностью и значительным запаздыванием.
Если при регулировании технологического процесса используется цифровой регулятор или цифровая управляющая машина, то такая система носит название цифровой автоматической системы регулирования. Такие системы рассмотрены в разделе IV.
В соответствии с реализуемым законом регулирования автоматические регуляторы непрерывного действия подразделяются на пропорциональные, интегральные, пропорциональноинтегральные, пропорционально-дифференциальные и пропор- ционально-интегрально-дифференциальные регуляторы.
Пропорциональные регуляторы (П-регуляторы). В П-регуля- торах перемещение регулирующего органа пропорционально отклонению регулируемой величины от заданного значения. Эти регуляторы также называются статическими, потому что в процессе регулирования они все время стремятся «догнать» отклонившуюся от заданного значения регулируемую величину и остановить ее, т. е. прекратить ее дальнейшее отклонение. Для П-регуляторов диапазон регулируемой величины, в пределах которого происходит перемещение регулирующего органа из одного крайнего положения в другое, называют пределом пропорциональности. Предел пропорциональности регулятора является обратной величиной его чувствительности. Чем больше предел пропорциональности регулятора, тем меньше его чувствительность, и наоборот.
Закон, реализуемый П-регулятором, имеет вид
У = К АХ,
где У — выходная величина регулятора (положение регулирующего органа); К — статический коэффициент передачи (усиления) регулятора; АХ — отклонение регулируемой величины.
Разность между минимальными и максимальными установившимися значениями регулируемой величины называют абсолютной статической неравномерностью. Ее наличие у П-регуляторов приводит к тому, что регулируемая величина изменяется по мере изменения нагрузки.
Преимуществами П-регуляторов являются их быстродействие (малое время переходного процесса) и высокая устойчивость процесса регулирования; основным недостатком — наличие остаточного отклонения регулируемой величины, что снижает точность регулирования. Л
П-регуляторы применяют на объектах регулирования с малым самовыравниванием и без самовыравнивания, когда изменение нагрузки незначительно.
Интегральные (астотические) регуляторы (И-регуляторы). И-регуляторы характеризуются перемещением регулирующего органа пропорционально интегралу отклонения регулируемой величины от заданного значения. Иными словами, регулирующей орган перемещается со скоростью, пропорциональной отклонению регулируемой величины, т. е.
йУ!йх = А Х/Ти.
Проинтегрировав это выражение, получим
X
к = (1/ти)|дхат,
о
где Та — время изодрома, представляющее собой время, за которое регулирующий орган переместится из одного крайнего положения в другое при максимальном отклонении регулируемой величины от заданного значения. Оно является параметром настройки И-регулятора.
В структуру И-регулятора входят последовательно включенные усилительные и интегрирующие звенья. В качестве интегрирующего звена обычно используется гидравлический сервопривод или электродвигатель постоянного тока, скорость вращения которого пропорциональна отклонению регулируемой величины.
Использование И-регуляторов исключает остаточное отклонение регулируемой величины при изменениях нагрузки. Эти регуляторы применяют на объектах с переменной нагрузкой, обладающих самовыравниванием и малым запаздыванием. И-регуля- торы работают тем лучше, чем больше степень самовыравнивания и меньше время запаздывания.
Пропорционально-интегральные регуляторы (ПИ-регуляторы). Эти регуляторы также называют изодромными регуляторами или регуляторами с упругой обратной связью. ПИ-регуляторы представляют собой сочетание пропорционального и интегрального регуляторов. Реализуемый ими закон регулирования имеет вид
ь
У
= К
Статический коэффициент усиления К и время изодрома ТИ являются параметрами настройки регуляторов.
В ПИ-регуляторах регулирующий орган при наличии отклонения регулируемой величины сначала перемещается быстро (пропорционально отклонению), а затем продолжает свое перемещение в результате интегрального воздействия (обычно медленнее). Пропорциональная часть регулятора стремится как бы «Догнать» и остановить изменение регулируемой величины. По достижении равновесия пропорциональная составляющая прекращает свое влияние на регулирующий орган, а действие интегрирующей составляющей будет продолжаться. В результате этого воздействия регулирующий орган займет такое положение, при котором статическая ошибка будет ликвидирована. Таким образом, наличие в регуляторе пропорционального воздействия убыстряет процесс стабилизации регулируемой величины, а интегральное воздействие снимает остаточное отклонение. В подобных регуляторах пропорциональную функцию выполняет жесткая обратная связь, а интегральную — гибкая (изодромная) обратная связь.
Действие изодрома характеризуется скоростью и временем изодрома. Скорость изодрома — скорость перемещения регулирующего органа под действием интегрального воздействия. Она выражается в процентах его хода в единицу времени. Время изодрома — время, в течение которого происходит изодромное перемещение регулирующего органа на 1 % его хода. Следовательно, время изодрома есть величина, обратная относительной скорости изодрома. Малому времени изодрома соответствует большая скорость регулирования, и наоборот.
ПИ-регуляторы могут поддержать в установившемся режиме постоянное значение регулируемой величины независимо от нагрузки и положения регулирующего органа. Эти регуляторы способны работать на объектах с различными свойствами.
Пропорционально-дифференциальные регуляторы (ПД-регуля- торы). ПД-регуляторы обеспечивают перемещение регулирующего органа как пропорционально отклонению регулируемой величины, так и пропорционально скорости отклонения. Подобные регуляторы еще при подходе регулируемой величины к заданному значению осуществляют действия, препятствующие переходу величины за пределы заданного значения.
В начальный момент рассогласования скорость отклонения регулируемой величины проявляется более значительно, чем изменение величины регулирующего параметра. Поэтому в закон регулирования ПД-регуляторов вводят предваряющее воздействие, что эффективно сказывается на качестве регулирования. Закон регулирования ПД-регуляторов описывается уравнением
У = К [АХ ± Тв (1 (ДХ)/Л],
где Тп — время предварения (дифференцирования). Знак плюс или минус указывает на то, что предварение может быть положительным или отрицательным.
Поскольку скорость изменения регулируемой величины есть первая производная ее изменения во времени, то такие регуляторы называют регуляторами по первой производной. Они применяются при регулировании быстропротекающих процессов.
Пропорционально-интегрально-дифференциальные регуляторы (ПИД-регуляторы). Эти регуляторы известны также под названием изодромные с предварением. В ПИД-регуляторах регулирующий орган перемещается пропорционально отклонению, интегралу и скорости отклонения регулируемой величины. Работу этих регуляторов можно рассматривать как совместное действие статического и астатического регуляторов с учетом скорости изменения регулируемой величины. Закон регулирования ПИД- регуляторов Выражается дифференциальным уравнением

