Файл: Учебное пособие соответствует рабочей программе дисциплины Строительная механика.docx
ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 03.02.2024
Просмотров: 79
Скачиваний: 0
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.

1.4.2. Классификация связей
Связи различаются по следующим отличительным признакам [3].
1. по области расположения:
1.1 – континуальные – распределенные по объёму, поверхности или линии;
1.2 – дискретные – в отдельных точках или сечениях.
Примером распределённых связей может служить деформируемое
основание для лежащих на нём балок, пластин, оболочек и т. п. В дальнейшем ограничимся рассмотрением только дискретных связей.
2. по соединяемым дискам:
2.1 – внутренние – соединяющие диски РС друг с другом;
2.2 – внешние (опорные) – прикрепляющие диски РС к диску «земля».
3. По числу ограничивающих перемещений:
3.1 – простые (элементарные) – связь накладывает ограничение на одно перемещение;
3.2 – сложные – связь ограничивает более одного перемещения.
4. По физическим свойствам связи бывают:
4.1 – жесткие (недеформируемые);
4.2 – податливые (деформируемые).
5. По направлению перемещения:
5.1 – двусторонние связи – препятствующие перемещению дисков в двух противоположных направлениях;
5.2 – односторонние связи – препятствующие перемещению дисков в одном направлении (например, канат).
6. По кинематическому признаку:
6.1 – необходимые связи – это связи, устранение которых вызывает изменение кинематической природы РС (геометрически неизменяемая РС превращается в геометрически изменяемую или мгновенно изменяемую РС, мгновенно изменяемая РС становится геометрически изменяемой);
6.2 – лишние связи – это связи, при удалении которых кинематическая природа РС не изменяется, но эти связи ограничивают перемещения в деформируемой РС. Несмотря на своё название, лишние связи, тем не менее нужны для реализации определенных эксплуатационных качеств сооружения и появляются в РС как результат принятия тех или иных инженерных решений при проектировании конструкций;
6.3 – ложные связи – это связи, которые не оказывают никакого влияния ни на кинематическую природу РС, ни на перемещения в ней, определяемые с учетом деформации элементов. Иными словами, при удалении ложной связи в РС ничего не изменяется – ни в случае учёта деформаций её элементов, ни в предположении об условной идеальной жёсткости материала.
Ложные связи в РС не нужны вообще, их можно рассматривать как «паразитные»; они должны быть выявлены и удалены из РС до начала её расчета – в противном случае математическое решение задачи определения усилий и перемещений в сооружении окажется невозможным.
! Лишние и ложные связи с количественной точки зрения являются избыточными, так как они не нужны для обеспечения геометрической неизменяемости РС – для этого достаточно только необходимых связей.
Связь, препятствующая взаимному поступательному (линейному) перемещению дисков, называется линейной. Связь, препятствующая взаимному вращательному (угловому) перемещению дисков, называется угловой.
Каждая связь имеет как кинематическую, так и статическую (силовую) характеристику.
Кинематическая характеристика определяет, каким движениям одного диска относительно другого препятствует связь и сколько степеней свободы она уничтожает.
Статическая характеристика определяет, какие реакции в ней могут возникнуть.
1.4.3. Типы жестких связей плоских расчетных схем

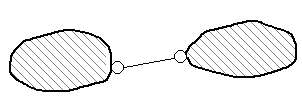
Рис. 1.19. Связь 1-го типа
Для плоских РС основными жесткими связями являются связи трех типов.
1. связь 1-го типа – линейная (одиночная связь) – жесткий прямолинейный стержень с шарнирами на концах (рис. 1.19) [2].
Кинематическая характеристика связи – исключает относительное (взаимное) линейное перемещение дисков по направлению оси связи и уничтожает одну степень свободы.
Статическая характеристика связи – возникает только одна реактивная сила, направление которой совпадает с направлением оси одиночной связи.

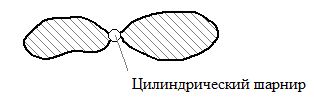
Рис. 1.20. Связь 2-го типа
2. связь 2-го типа – простой шарнир (без трения) – устройство, в котором соединяются два диска (рис. 1.20) [2].
Кинематическая характеристика – простой шарнир препятствует поступательным (линейным) перемещениям одного диска относительно другого и уничтожает две степени свободы, не препятствует любым взаимным поворотам дисков вокруг шарнира.

Статическая характеристика – в простом шарнире возникают две реактивные силы: вертикальная и горизонтальная – силы взаимодействия двух дисков.
В некоторых точках (узлах) РС могут соединяться шарнирно более двух дисков (рис. 1.21, а).
Шарнирный узел (рис. 1.21, а) по существу представляет собой попарное соединение дисков бесконечно близко расположенными шарнирами (рис. 1.21, б), условно изображаемыми с общим центром (осью вращения). Поэтому шарнир, в котором соединяются более двух дисков, называется сложным (кратным) шарниром.

Рис. 1.21. Сложный (кратный) шарнир
! Если сложный шарнир соединяет D дисков, то такой шарнир эквивалентен D-1 простому шарниру
Ш = D – 1. (1.1)
В случае, показанном на рис. 1.21, соединение дисков в узле учитывается как три простых шарнира (Ш = 4 – 1 = 3). Заметим, что если какой-либо диск (стержень) из сходящихся в шарнирном узле отнесен не к дискам, а к связям 1-го типа, то при подсчете кратности шарнира он, конечно, не учитывается.
При описании шарниров часто используются уточняющие термины:
а) врезанный шарнир:

б) примыкающий (не врезанный) шарнир:

3. Связь 3-го типа – простая припайка (жесткий узел) – устройство, в котором жестко соединяются два диска (рис. 1.22).
Рис. 1.22. Связь 3-го типа
Кинематическая характеристика связи – припайка (жёсткий узел) препятствует всем трём взаимным перемещениям, т. е. не допускает ни поступательных перемещений, ни вращения одного диска относительно другого и уничтожает три степени свободы.
Статическая характеристика – возникает три реактивные силы (две: вертикальная и горизонтальная силы и момент относительно точки).
Если в точке (узле) соединяются жестко более двух дисков, то припайка (жесткий узел) называется кратной (или сложной) (рис. 1.23, а).
Рис. 1.23. Кратная (сложная) припайка
Кратность сложной припайки, т. е. количество простых припаек в сложной припайке, аналогично кратности сложного шарнира, можно
определить по формуле
П = D – 1. (1.2)
Очевидно, что в случае, приведенном на рис. 1.23, б, несмотря на наличие трех сходящихся в узле дисков (стержней), припайка не является кратной (сложной), так как два из трех дисков заранее объединены в диск D1. Если какой-либо из стержней, жёстко соединенных в узле, принят в качестве связи 3-го типа, то он не учитывается в формуле при определении D.
Аналогично, что в случае, приведенном на рис. 1.23, в, припайки нет (П = 0), так как все три стержня заранее объединены в один диск D1.
РС сооружения может содержать узлы, в которых осуществляется одновременное соединение дисков с помощью шарниров и припаек, в том числе и кратных. Такие узлы, в отличие от тех, где соединение дисков только шарнирное (шарнирные узлы) или только жесткое (жесткие узлы),называются узлами с комбинированным соединением дисков. Для правильной оценки числа эквивалентных простых шарниров и припаек требуется аккуратная оценка кинематических свойств комбинированного соединения. Например, в комбинированном узле, изображенном на рис. 1.24, а, жёстко соединяются три диска-стержня D1, D2 и D3 (соответственно кратная припайка эквивалентна двум простым), а кратный шарнир связывает четыре диска – D4, D5, D6 и объединённый супердиск D1 = D1 + D2 + D3 и поэтому эквивалентен трем простым шарнирам; следовательно, П = 3 – 1 = 2, Ш = 4 – 1 = 3 [3].
В комбинированном узле, показанном на рис. 1.24, б, соединяются семь дисков с помощью двух простых и одной кратной припайки, эквивалентной двум простым, а также кратного шарнира, связывающего три
укрупненных диска DI + D2, D6 + D7 и D3 + D4 + D5. В итоге для узла имеем
П = 4, Ш = 2.


б

D1
а
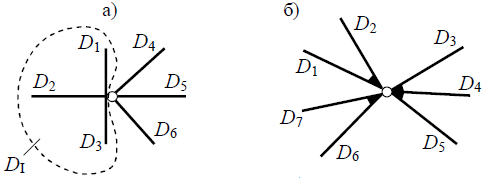
Рис. 1.24. Комбинированный узел
Сложные связи 2-го и 3-го типов формально могут рассматриваться как различные комбинации простых связей, обеспечивающих соединение дисков, кинематически эквивалентное соответствующей сложной связи (т. е. с такими же ограничениями на взаимные перемещения дисков) [3].
Простой шарнир (рис. 1.25, а) эквивалентен двум линейным связям
1-го типа, каждая из которых одним концом прикреплена к одному из дисков (D1 на рис. 1.25, б) в точках А и В, а другим – ко второму диску D2 в общей точке С.
б
а
Рис. 1.25. Простой шарнир
Припайка (жесткий узел) кинематически эквивалентна трём одиночным связям или простому шарниру и одиночной связи (рис. 1.26).
Рис. 1.26. Припайка (жесткий узел)
Комбинации простых связей могут рассматриваться как соответствующие сложные связи.
Соединение двух дисков двумя линейными связями 1-го типа (рис. 1.25) может быть отождествлено с простым шарниром в точке пересечения направления осей связей, так как эта точка является мгновенным центром взаимного вращения дисков D1 и D2.

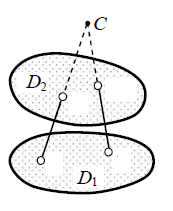
Рис. 1.27. Фиктивный шарнир
Точка пересечения направлений осей двух линейных связей называется фиктивным (условным) шарниром (рис. 1.27).
Если в заданной РС сооружения имеются податливые (деформируемые) связи, то в кинематическом анализе (до определенного момента) после применения гипотезы их отвердения они могут заменяться типовыми жесткими.
Очевидно, что для обеспечения геометрической неизменяемости РС, её диски должны быть соединены друг с другом и с диском «земля»некоторым минимумом связей. Число и тип связей зависят от того, сколько и каких по типу (линейных и угловых) перемещений в сумме имели бы диски, полностью свободные от связей (в дальнейшем такие диски будем называть несвязанными).
Соединение дисков в СС связано с понятиями о степенях свободы и изменяемости СС.