Файл: Расчёт характеристик трансформатора и электрических двигателей.docx
ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 03.02.2024
Просмотров: 79
Скачиваний: 0
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.

При реостатном способе регулирования сопротивление якорной цепи увеличивается
Искусственные характеристики ДПТ ПВ, получаемые путем изменения магнитного потока ДПТ, используются главным образом для регулирования скорости. Этот способ находит широкое применение в автоматизированном электроприводе вследствие простоты его реализации и экономичности, так как регулирование осуществляется в относительно маломощной цепи возбуждения ДПТ.
Регулирование магнитного потока при использовании этого способа производится только в сторону его уменьшения (ослабления) по сравнению с номинальным за счет уменьшения тока возбуждения
1.Увеличение магнитного потока должно вызываться соответствующим увеличением тока возбуждения ДПТ. Однако поскольку номинальный магнитный поток создается номинальным током возбуждения, то увеличение тока возбуждения выше номинального вызывает дополнительный нагрев ДПТ, что недопустимо.
2.Двигатель рассчитан и сконструирован таким образом, что его магнитная система близка к насыщению.
Показатели данного способа регулирования скорости ДПТ ПВ следующие :диапазон регулирования 3-4; прямая на графике уходит вверх от естественной характеристики(увеличение тока холостого хода);плавность регулирования определяется плавностью регулирования тока возбуждения; стабильность скорости достаточно высокая, хотя она и снижается при уменьшении магнитного потока. Способ экономичен, так как регулирование скорости не сопровождается значительными потерями мощности, а реализация его не требует больших капитальных затрат. Таким образом, регулирование скорости изменением магнитного потока целесообразно при постоянной механической мощности нагрузки, что обеспечивает полное его использование при работе на всех искусственных характеристиках.
Изменение механических характеристик напряжением, подведённого к якорю двигателя при номинальном потоке, является в регулируемом электроприводе основным управляющим воздействием. Как правило, изменение напряжения возможно только в сторону уменьшения от номинального, причём для мощных двигателей это ограничение является жёстким из-за ухудшения коммутации.
В отличие от ослабления поля, изменение напряжения позволяет не только изменять скорость, но и ограничивать ток короткого замыкания. Плавное изменение напряжения на якоре от обеспечивает плавность пуска двигателей.
На рисунке 1.2.2 показаны искусственные и естественные механические характеристики ДПТ ПВ
Рисунок 1.1.2 Естественные и искусственные характеристики ЭД.
1.1.4 Режимы торможения двигателя.
Выше была рассмотрена работа электропривода в двигательном режиме, чему соответствуют механические характеристики в 1 и 3 квадрантах .Однако этим не исчерпываются возможные режимы работы электропривода и его механические характеристики. Весьма часто в современных электроприводах необходимо быстро и точно остановить механизм или изменить направление его движения. Быстрота и точность, с какой будут проделаны эти операции, во многих случаях определяет производительность машин и механизмов, а иногда и качество выпускаемой продукции. Во время торможения или перемены направления движения(реверса) электропривод работает в тормозных режимах на одной из механических характеристик, соответствующих осуществляемому способу торможения.
Для двигателя постоянного тока с параллельным возбуждением возможны следующие тормозные режимы работы:
1) генераторное торможение с отдачей энергии в сеть (рекуперативное торможение);
2) динамическое торможение;
3) торможение противовключением.
Режимом рекуперативного торможения называют такой режим, когда электродвигатель при определенных режимах работы привода, в силу своей обратимости, становится генератором, преобразуя кинетическую энергию движущихся масс механизма в электрическую с отдачей ее в питающую сеть.
Переход электродвигателя в генераторный режим с отдачей энергии в сеть возможен при скорости привода, превышающей скорость соответствующего идеального холостого хода. При этом ЭДС двигателя, направленная противоположно напряжению сети, становится больше его, и ток в якоре электродвигателя меняет направление на обратное. Практически режим рекуперативного торможения может быть осуществлен:

1) при наличии отрицательного статического момента нагрузки, когда электродвигатель под его действием в сторону вращения, получив ускорение, достигает скорости, превышающей скорость идеального холостого хода;
2) при переходе электродвигателя с большей скорости, полученной ослаблением потока двигателя, на меньшую за счет резкого увеличения магнитного потока.
Механические характеристики в данном режиме при различных значениях сопротивлений в якорной цепи электродвигателя являются продолжением характеристик двигательного режима в области второго квадранта . С увеличением скорости при неизменном сопротивления величина тормозного момента возрастает. Увеличение внешнего сопротивления в цепи якоря при неизменном отрицательном статическом моменте на валу электродвигателя приводит к увеличению скорости привода.
Режимом электродинамического торможения называют такой режим работы электродвигателя, при котором его якорь отключается от питающей сети и замыкается на внешнее сопротивление, а обмотка возбуждения остается подключенной к сети. В этом режиме двигатель работает в режиме генератора с независимым возбуждением, преобразуя кинетическую энергию движущихся инерционных масс привода в электрическую, которая расходуется на нагрев сопротивлений в якорной цепи.
Механические характеристики в режиме динамического торможения расположены во втором квадранте и представляют прямые линии, проходящие через начало координат.
Тормозной момент возрастает с уменьшением тормозного сопротивления и наоборот. Наибольшего тормозного эффекта можно достигнуть при замыкании якоря двигателя накоротко.
По условиям ограничения тормозного тока замыкание якоря накоротко применяется только для двигателей малой мощности, обладающих сравнительно большим сопротивлением якоря, а также для всех остальных электродвигателей при торможении на малых скоростях.
Режимом противовключения называется такой режим работы, когда при вращении электродвигателя под действием инерционных масс привода в электродвигатель из сети поступает ток такого направления, которое соответствует вращению его в противоположную сторону.
Переход из двигательного режима в режим противовключения осуществляется изменением полярности напряжения на зажимах якоря.
При изменении полярности напряжения необходимо в цепь якоря двигателя ввести внешнее тормозное сопротивление, с тем, чтобы ток в нем, обусловленный суммой напряжения в сети и ЭДС электродвигателя, не превысил допустимого значения.
Механические характеристики в режиме противовключения линейны и расположены во втором квадранте. С уменьшением тормозного сопротивления тормозной момент возрастает и наоборот.
Режим противовключения может быть получен без изменения полярности напряжения на якоре двигателя при наличии активного момента сопротивления на его валу за счет введения в цепь якоря достаточно большого сопротивления. Установившаяся скорость вращения при этом находится в четвертом квадранте.[3]
1.2 Расчет характеристик двигателя постоянного тока.
Двигатель постоянного тока параллельного возбуждения имеет следующие данные:
Таблица 1.2.1-Данные ДПТ ПВ
| Номер варианта | | | | | | | |
| кВт | В | А | Об/мин | Ом | Ом | | |
| 71 | 25 | 220 | 136 | 600 | 0,2154 | 48,4 | 83,5 |
где
1.2.1 Электрическая схема включения двигателя параллельного возбуждения.
Обмотки ротора и возбуждения подключаются параллельно к одному источнику питания. При таком включении ток через обмотку возбуждения в несколько раз меньше, чем через ротор. Характеристики электродвигателей получаются жесткими, позволяющие использовать их для привода станков, вентиляторов. Регулировка скорости вращения обеспечивается включением реостатов в цепь ротора или последовательно с обмоткой возбуждения:
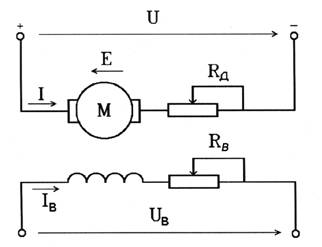
Рисунок 1.2.1 Схема включения двигателя параллельного возбуждения.
1.2.2 Приведение к расчетной температуре сопротивлений.
При работе обмотки электрических машин нагреваются, что вызывает изменение их электрического сопротивления. Поэтому сопротивление обмоток необходимо, привести к расчетной температуре 75°С (в таблице вариантов даны сопротивления при 20°С) по формуле(1):
| | |
где α=0,004 -температурный коэффициент сопротивления меди
Сопротивление обмотки возбуждения при температуре
Сопротивление якоря при температуре
1.2.3 Определение номинального тока возбуждения и номинального тока якоря.
Ток возбуждения находится по формуле(1.2)
| | |
Где