Файл: Конспект лекций для магистрантов специальности 6М070200 Автоматизация и управление.doc
ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 27.04.2024
Просмотров: 305
Скачиваний: 0

СОДЕРЖАНИЕ
Модуль 1. Моделирование и идентификация статических характеристик объектов
Тема 2 Математические модели объектов идентификации
Лекция 2 Основнные понятия и терминология дисциплины
Лекция 3 Постановка задачи моделирования и идентификации статических характеристик объектов
Лекция 4 Основные характеристики случайных величин
Лекция 5 Оценка статистических показателей(часть1)
Лекция 6 Оценка статистических показателей(часть2)
Лекция 7 Статические модели в форме управления регрессии и методы их определения (часть 1)
Лекция 8 Статические модели в форме управления регрессии и методы их определения (часть 2)
Лекция 9 Статические модели в форме управления регрессии и методы их определения (часть 3)
Лекция 10 Статические модели в форме управления регрессии и методы их определения (часть 4)
Лекция 11 Методы планирования эксперимента (часть 1)
Лекция 12 Методы планирования эксперимента (часть 2)
Лекция 13 Методы планирования эксперимента (часть 3)
Лекция 14 Методы планирования эксперимента (часть 4)
Лекция 15 Методы планирования эксперимента (часть 5)
Модуль 2. Моделирование и идентификация динамических характеристик объектов
Тема3 Моделирование и идентификация динамических характеристик объектов
Лекция 16 Множество моделей, структуры моделей (часть 1)
Лекция 17 Множество моделей, структуры моделей (часть 2)
Лекция 18 Идентификация динамических систем
Лекция 19 Определение частотных характеристик.
Лекция 20 Определение переходных характеристик
Тема 4 Параметрическая статистическая идентификация
Лекция 21 Основные характеристики времянных рядов
Лекция 22 Параметрическая статистическая идентификация (часть 1)
Лекция 23 Параметрическая статистическая идентификация (часть 2)
Лекция 24 Параметрическая статистическая идентификация (часть 3)
Лекция 25 Параметрическая статистическая идентификация (часть 4)
Лекция 26 Параметрическая статистическая идентификация (часть 5)
Лекция 27 Параметрическая статистическая идентификация (часть 6)
Тема 4 Специальное программное обеспечение задач моделирования
Лекция 28 Специальное программное обеспечение задач моделирования (часть 1)
Лекция 29 Сециальное программное обеспечение задач моделирования (часть 2)
Лекция 30 Сециальное программное обеспечение задач моделирования (часть 2)
Приложение А. Условные обозначения
Приложение Б. Глоссарий. Основная терминология
Методическое обеспечение дисциплины и ТСО.
Учебники, учебные пособия, методические указания, конспекты лекций, справочники и др.
Плакаты, слайды, видео- и телефильмы, программы для ЭВМ (номера, полные названия)
 , (23.2)
, (23.2) где - некоторая выпуклая функция.
В частности:
. (23.3)
В общем случае оценка адекватности проводится для различных форм входного сигнала . Отсюда следует идея необходимости усреднения по входным сигналам и начальным условиям, т.е. введения операции математического ожидания оценки :
 . (23.4)
. (23.4)Выражение выходного сигнала имеет довольно сложный вид, что затрудняет аналитическое исследование зависимости от коэффициентов модели, поэтому вводятся и другие критерии. В частности, если уравнение модели имеет вид
то для оценки близости модели и объекта удобным оказывается функционал от разности входных сигналов модели и объекта, обеспечивающих один и тот же выходной сигнал:
 , (23.6)
, (23.6) при условии, что . В этом случае выходной сигнал модели и объекта будем обозначать .
Тогда, подставляя (23.5) в (23.6), имеем
 , (23.7)
, (23.7)т.е. функционал в явном виде зависит от коэффициентов модели, что удобно для аналитического исследования.
Развивая эту идею, можно формализовать удобный функционал для общего случая модели (23.1)
 . (23.8)
. (23.8) Выражение:
называется обобщенной ошибкой модели. В качестве функции , как правило, принимают квадрат обобщенной ошибки
. (23.11)
Этот функционал удобен тем, что в явном виде зависит от параметров модели и от доступного измерения входного и выходного сигналов объекта. Однако при вычислении этого функционала возникают определенные трудности, связанные с дифференцированием сигналов и , а также с необходимостью выполнения операции математического ожидания. Структурная схема вычисления обобщенной ошибки и оценки критерия
представлена на на рисунке 23.2, где - оператор дифференцирования.
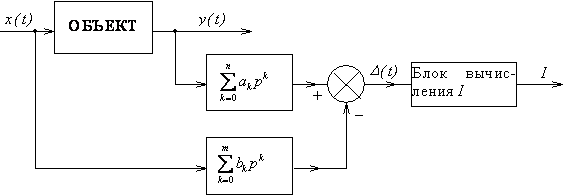
Рисунок 23.2 - Структурная схема вычисления обобщенной ошибки и оценки критерия
Однако по условиям физической реализуемости можно создавать лишь устройства, порядок числителя которых меньше (или равно) порядка знаменателя, т.е. можно реализовать устройства с операторами
где - многочлен степени больше или равно ; .
Тогда структурная схема вычисления обобщенной ошибки и оценки критерия будет иметь вид, представленной на рисунке 23.3.
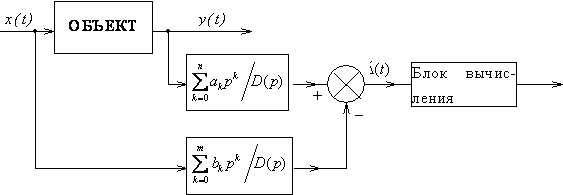
Рисунок 23.3 - Структурная схема вычисления обобщенной ошибки
. (23.13)
Структурной схеме, изображенной на рисунке 23.3, эквивалентна схема, приведенная на на рисунке 23.4.
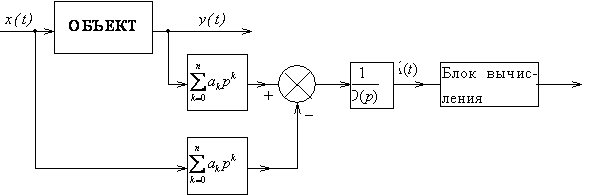
Рисунок 23.4 – Эквивалентная структурная схема вычисления обобщенной ошибки
Таким образом, обобщенная ошибка , измеряемая с помощью физически реализуемых устройств, отличается от обобщенной ошибки тем, что является результатом преобразования фильтром с передаточной функцией . В силу конечности полосы пропускания этого фильтра происходят искажения сигнала обобщенной ошибки. Эти искажения будут тем меньше, чем больше полоса пропускания фильтра.
Если величина ошибок модели и оценок критериев приближения удовлетворяют требованиям к качеству модели, то модель считается адекватной объекту и может быть использована для решения задач моделирования, оптимизации и управления. В противном случае модель необходимо усовершенствовать путем изменения структуры и введения в нее неучтенных ранее факторов.
Основная литература
-
Современные методы идентификации систем. Под ред. П. Эйкгоффа, М.: Мир, 1983 -
Ордынцев В. М. Математическое описание объектов автоматизации. – М: Машиностроение, 1965. – 360 с. -
Гроп Д. Методы идентификации систем. – М: Мир, 1979. – 302 с.
Дополнительная литература
-
Практикум по автоматике и системам управления производственными процессами: учеб. пособие для вузов /под ред. И.М.Масленникова. -М.: Химия, 1986. -336с. -
Семенов А. Д., Артамонов Д. В., Брюхачев А. В. Идентификация объектов управления: Учебн. пособие. - Пенза: Изд-во Пенз. гос. ун-та, 2003.- 211 с. -
Исмаилов С.У. Современные методы идентификации объектов и систем управления. Методические указания к выполнению лабораторных работ для магистрантов спец. 6М0702. Шымкент, ЮКГУ, 2010 г., -78 с.
Лекция 24 Параметрическая статистическая идентификация (часть 3)
Корреляционные методы идентификации
Метод корреляционного анализа используется для идентификации объектов управления в том случае, если входные и выходные сигналы являются случайными величинами. Рассмотрим пример определения АФЧХ на основе АКФ и ВКФ.
Рисунок 24.1 - Схема исследования объекта корреляционным методом
При корреляционном анализе используются описанные нами выше:
-
автокорреляционная функция (АКФ) и -
взаимокорреляционная функция (ВКФ).
Напомним, что АКФ характеризует зависимость последующих значений случайной величины от предыдущих, находящихся на расстоянии .
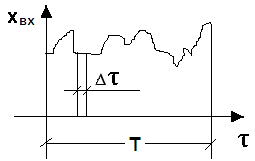
Рисунок 24.2 -. График изменения входной случайной величины – входного сигнала.
АКФ:
Взаимокорреляционная функция связывает две величины, отстоящие друг от друга на .
ВКФ:
С АКФ и ВКФ связаны (через преобразование Фурье, когда входной-выходной сигнал раскладывается в ряд Фурье, состоящий из суммы синусоидальных колебаний с различной – ряд гармоник) спектральные плотности случайных величин.
Физически
Через спектральную плотность находим искомую АФЧХ объекта:
 .
.Однако прежде чем переходить к изложению особенностей различных методов идентификации динамики, необходимо уточнить понятие идентифицируемости объекта. Объект управления следует считать идентифицируемым, если существует вводящаяся за конечное число шагов процедура вычисления его характеристических параметров. Достаточным условием идентифицируемости является наблюдаемость системы.
Наблюдаемость (по Калману) — это свойство динамической системы, позволяющее вычислять любой параметр состояния объекта после конечного числа наблюдений. Необходимые условия идентифицируемости отличаются от условий наблюдаемости, т.е. идентифицируемым может оказаться объект и в не полностью наблюдаемой системе. Далее мы рассмотрим математическое обоснование наблюдаемости и идентифицируемости для детерминированных и стохастических систем.
В основе статистических методов определения импульсной переходной функции объекта лежит интегральным уравнением Фредгольма
где
Определенная из этого уравнения
Решение уравнения (24.1) с целью определения
Стохастическая аппроксимация (СА) (от греч. stochastikos - умеющий угадывать, проницательный и лат. approximo - приближаюсь), метод решения широкого класса задач статистического оценивания, при котором каждое следующее значение оценки получается в виде основанной лишь на новом наблюдении поправки к уже построенной оценке. Основными чертами, обусловившими популярность СА в теоретических и прикладных работах, явились её непараметричность (применимость при весьма скудной информации об объекте наблюдения) и рекуррентность (простота пересчёта оценки при поступлении нового результата наблюдений). СА применяется во многих прикладных задачах теории управления, обучения, в задачах техники, биологии, медицины. СА описана в 1951 американскими статистиками Г. Роббинсом и С. Монро, которые предложили рекуррентный план отыскания корня уравнения

