Файл: Конспект лекций для магистрантов специальности 6М070200 Автоматизация и управление.doc
ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 27.04.2024
Просмотров: 298
Скачиваний: 0

СОДЕРЖАНИЕ
Модуль 1. Моделирование и идентификация статических характеристик объектов
Тема 2 Математические модели объектов идентификации
Лекция 2 Основнные понятия и терминология дисциплины
Лекция 3 Постановка задачи моделирования и идентификации статических характеристик объектов
Лекция 4 Основные характеристики случайных величин
Лекция 5 Оценка статистических показателей(часть1)
Лекция 6 Оценка статистических показателей(часть2)
Лекция 7 Статические модели в форме управления регрессии и методы их определения (часть 1)
Лекция 8 Статические модели в форме управления регрессии и методы их определения (часть 2)
Лекция 9 Статические модели в форме управления регрессии и методы их определения (часть 3)
Лекция 10 Статические модели в форме управления регрессии и методы их определения (часть 4)
Лекция 11 Методы планирования эксперимента (часть 1)
Лекция 12 Методы планирования эксперимента (часть 2)
Лекция 13 Методы планирования эксперимента (часть 3)
Лекция 14 Методы планирования эксперимента (часть 4)
Лекция 15 Методы планирования эксперимента (часть 5)
Модуль 2. Моделирование и идентификация динамических характеристик объектов
Тема3 Моделирование и идентификация динамических характеристик объектов
Лекция 16 Множество моделей, структуры моделей (часть 1)
Лекция 17 Множество моделей, структуры моделей (часть 2)
Лекция 18 Идентификация динамических систем
Лекция 19 Определение частотных характеристик.
Лекция 20 Определение переходных характеристик
Тема 4 Параметрическая статистическая идентификация
Лекция 21 Основные характеристики времянных рядов
Лекция 22 Параметрическая статистическая идентификация (часть 1)
Лекция 23 Параметрическая статистическая идентификация (часть 2)
Лекция 24 Параметрическая статистическая идентификация (часть 3)
Лекция 25 Параметрическая статистическая идентификация (часть 4)
Лекция 26 Параметрическая статистическая идентификация (часть 5)
Лекция 27 Параметрическая статистическая идентификация (часть 6)
Тема 4 Специальное программное обеспечение задач моделирования
Лекция 28 Специальное программное обеспечение задач моделирования (часть 1)
Лекция 29 Сециальное программное обеспечение задач моделирования (часть 2)
Лекция 30 Сециальное программное обеспечение задач моделирования (часть 2)
Приложение А. Условные обозначения
Приложение Б. Глоссарий. Основная терминология
Методическое обеспечение дисциплины и ТСО.
Учебники, учебные пособия, методические указания, конспекты лекций, справочники и др.
Плакаты, слайды, видео- и телефильмы, программы для ЭВМ (номера, полные названия)
Рассмотрим построение плана ДФЭ 23-1. Здесь n = 3, к =1, N=23-1=4. Первые два фактора варьируем как и ранее для плана ПФЭ 22, а для третьего фактора выбираем генерирующее соотношение в виде .
Для неполного квадратичного полинома количество столбцов плана составляет восемь.
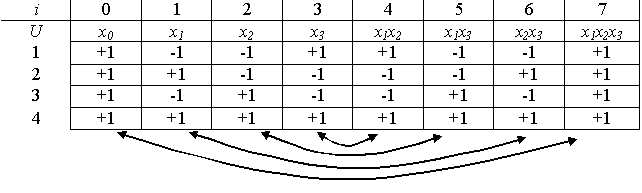
План является ортогональным, но в нем оказались четыре пары одинаковых столбцов. Поэтому можно определить только четыре коэффициента, отражающие совместные влияния двух одинаковых столбцов
.
Суммарные значения коэффициентов ; ; определяются аналогично. Это следствие того, что мы пытаемся определить полное количество коэффициентов – 8 по недостаточному числу опытов - 4. Однако, если заранее известно, что некоторые из членов уравнения равны нулю (пренебрежимо малы) или имеется априорная информация о величинах некоторых коэффициентов, то полученные коэффициенты могут быть вычленены. Так если , то
.
Если можно допустить, что коэффициенты из их смешанной оценки сопоставимы, то для рассмотренного плана
.
Графическое изображение планов ПФЭ 23 и ДФЭ 23-1 в факторном пространстве (для трех факторов - трехмерное пространство) представлено на рисунке 12.2. План ПФЭ 23 представлен кубом с восемью узлами (точками плана), а возможные планы ДФЭ 23-1 – проекциями этого куба на три плоскости. То есть из восьми узлов выбираются четыре (Рисунок 12.2, а). Из куба можно также выбрать четыре точки из восьми, не лежащие в одной плоскости, и сформировать план ДФЭ 23-1 (Рисунок 12.2, б).

Рисунок 12.2 - Графическое изображение планов ПФЭ 23 и ДФЭ 23-1 в факторном пространстве
Планы ДФЭ, как и планы ПФЭ, являются рототабельными. Планы ДФЭ могут быть как насыщенными, так и ненасыщенными.
Достоинство планов ДФЭ заключается и в том, что если построенный на его основе неполный полином не удовлетворяет требованиям по точности, то план ДФЭ легко достраиваются до плана ПФЭ, без потери информации прежних опытах, с формированием более точного полинома.
Пример построения плана ДФЭ.
Построить план ДФЭ 24-1 и определить полином
Число факторов – 4. Нужно найти 8 коэффициентов полинома. Выбираем 8 из 16 опытов плана ПФЭ 24 таким образом, чтобы были определены независимые коэффициенты при самих факторах, смешанные коэффициенты при парных сочетаниях факторов и в пренебрежении тройными и четверным сочетаниями факторов и при этом сохранялась ортогональность плана.
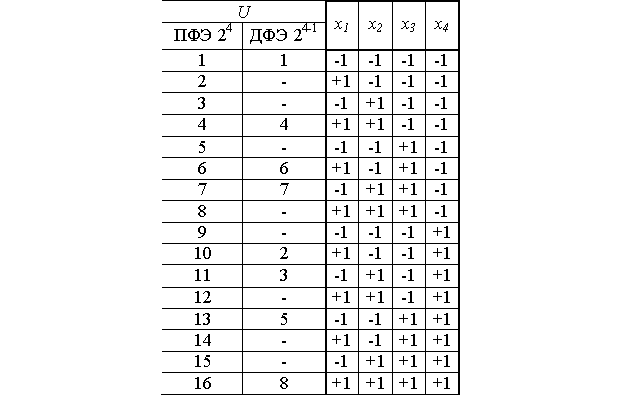
Такой выбор позволяет сформировать план ДФЭ 24-1 как и план ПФЭ 23, но с х4=х1х2х3 . План ДФЭ 24-1 представляется в виде
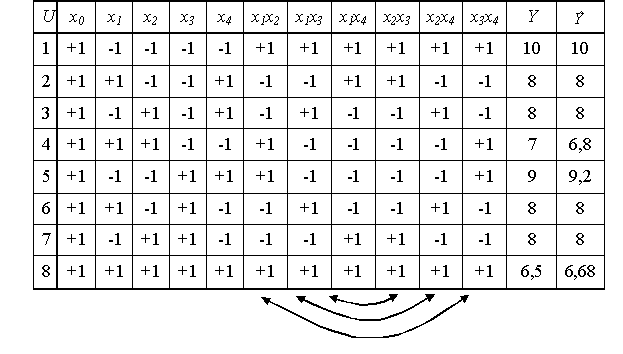
Значения коэффициентов полинома составляют:
.
;
;
Если принять, что
,
,
,
то полином имеет вид
Значения полинома в точках плана приведены в последнем столбце плана ДФЭ 24-1. В нашем случае точность его достаточно высокая.
Основная литература
-
Ахназарова С.Л., Кафаров В.В. Методы оптимизации эксперимента в химической технологии: Учебное пособие для вузов. - 2-е изд., перераб. и дополненное. -М.: Высшая школа, 1985. -327с. -
Исмаилов С.У. Современные методы идентификации объектов и систем управления. Методические указания к выполнению лабораторных работ для магистрантов спец. 6М0702. Шымкент, ЮКГУ, 2010 г., -78 с.
Лекция 13 Методы планирования эксперимента (часть 3)
Ортогональное планирования эксперимента
Другое название - планы Бокса-Уилсона. Для построения ортогональных центральных композиционных планов (ЦКП) используется так называемое звездное плечо α (плечо звездных точек). Это опыты, которые проводятся дополнительно, например, к плану ПФЭ (при k<5) или к дробному плану(при k≥5). В таблице 13.1. приведено такое дополнение к плану в таблице 13.2.
Таблица 13.1
Дополнение к плану ПФЭ
| № опыта | | | | | | |
| 9 | +1 | –α | 0 | 0 | y9 | Звездные точки (2k точек) |
| 10 | +1 | +α | 0 | 0 | y10 | |
| 11 | +1 | 0 | –α | 0 | y11 | |
| 12 | +1 | 0 | +α | 0 | y12 | |
| 13 | +1 | 0 | 0 | –α | y13 | |
| 14 | +1 | 0 | 0 | +α | y14 | |
| 15 | +1 | 0 | 0 | 0 | Y15 | Центр плана N0 точек |
Общее количество опытов определяется по формуле:
Обычно звездные точки и точку в центре добавляют, если при ПФЭ не удается получить адекватную математическую модель и при исследовании области, близкой к экстремуму. При описании такой области наиболее широко используют полиномы второго порядка. ЦКП неортогональны, но легко сводятся к ортогональным (ОЦКП), путем выбора α. Значения α приведены в таблице 13.2. ([1]., стр.181, 183)
Таблица 13.2
| N0 | k=2 | k=3 | k=4 |
| 1 | α=1,000 | α=1,476 | α=2,000 |
| 2 | α=1,160 | α=1,650 | α=2,164 |
| 3 | α=1,317 | α=1,831 | α=2,390 |
Матрица планирования для ОЦКП, используемая для расчета коэффициентов дополняется столбцами
Таблица 13.3
| № опыта | | | | | | | |
| 1 | 2 | 3 | 4 | 6 | 8 | 9 | 10 |
| 1 | +1 | +1 | +1 | +1 | +0,333 | +0,333 | |
| 2 | +1 | +1 | –1 | –1 | +0,333 | +0,333 | |
| 3 | +1 | –1 | –1 | +1 | +0,333 | +0,333 | |
| 4 | +1 | –1 | +1 | –1 | +0,333 | +0,333 | |
| 5 | +1 | +1 | 0 | 0 | +0,333 | –0,667 | |
| 6 | +1 | –1 | 0 | 0 | +0,333 | –0,667 | |
| 7 | +1 | 0 | +1 | 0 | –0,667 | +0,333 | |
| 8 | +1 | 0 | –1 | 0 | –0,667 | +0,333 | |
| 9 | +1 | 0 | 0 | 0 | –0,667 | –0,667 | |
Благодаря ортогональности матрицы планирования все коэффициенты рассчитываются независимо друг от друга по формуле:
 , (13.2) ,
, (13.2) ,а дисперсии коэффициентов равны:
 (13.3)
(13.3) В результате расчета по матрице в таблице 13.3 уравнение регрессии в ОЦКП получается в виде:
Чтобы перейти к обычной записи
и оценивают с дисперсией:
Зная дисперсию воспроизводимости, проверяют значимость коэффициентов и адекватность уравнения регрессии:
Адекватность проверяют по критерию Фишера, составляя отношение дисперсий:
 , условие адекватности
, условие адекватности Значимость коэффициентов определяют по формуле:
Т.к.
Подведем итог. Рототабельные планы – это планы, у которых точки плана располагаются на окружностях (сферах, гиперсферах). У рототабельного плана первого порядка точки плана располагаются на одной окружности (сфере, гиперсфере) с радиусом R
,
где V=1,…, N - номер точки плана, i =1,…, n – номер фактора.
В таком случае точность оценивания функции отклика по любому направлению факторного пространства (для всех точек плана) одинаковая.
Рототабельный план может быть симметричным, когда точки плана располагаются симметрично друг друга. Рассмотренный ранее план ПФЭ 2n – рототабельный симметричный план первого порядка.
У рототабельных планов второго порядка точки плана располагаются на двух концентрических гиперсферах с радиусами R1 и R2 . В таких планах
,
для V =1,…, N0 и
,
для W=1,…, n0,
где V и W – текущие номера точек плана в двух подмножествах опытов N0 и n0 из их общего количества N, относящихся к двум разным концентрическим сферам. Одна из сфер может быть вырожденной, когда R2=0. Рассмотренный ранее ортогональный центрально-композиционный план второго порядка (ОЦКП) не является рототабельным планом, так как его точки лежат на трех концентрических окружностях (сферах, гиперсферах). При n=2 это очевидно из Рисунок 14. “Звездные” точки плана и точки плана ПФЭ 2n лежат на разных окружностях.

Рисунок 13.1 -. Расположение точек ОЦКП на трех окружностях
Рототабельный план может быть ортогональным, если выполняется условие
,
где , , , - номера столбцов плана.
Лекция 14 Методы планирования эксперимента (часть 4)
Рототабельное планирования эксперимента.
Рототабельный ортогональный центрально-композиционный план (РОЦКП) строится аналогично рассмотренному ранее ОЦКП. К использованному в качестве ядра плану ПФЭ 2n добавляются “звездные” точки - по две на каждый фактор и несколько точек в центре плана. “Звездные” точки должны располагаться на поверхности гиперсферы с радиусом R, на которой лежат и точки плана ПФЭ 2n, то есть величина плеча “звездных” точек должна равняться радиусу R. Это может быть обеспечено, при выполнении условия ортогональности, только при соответствующем выборе числа наблюдений в центральной (нулевой) точке плана n0. Для РОЦКП n0 зависит от числа факторов n. Напомним, что в ОЦКП n0 = 1 для любого числа n.

