Файл: Конспект лекций для магистрантов специальности 6М070200 Автоматизация и управление.doc
ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 27.04.2024
Просмотров: 319
Скачиваний: 0

СОДЕРЖАНИЕ
Модуль 1. Моделирование и идентификация статических характеристик объектов
Тема 2 Математические модели объектов идентификации
Лекция 2 Основнные понятия и терминология дисциплины
Лекция 3 Постановка задачи моделирования и идентификации статических характеристик объектов
Лекция 4 Основные характеристики случайных величин
Лекция 5 Оценка статистических показателей(часть1)
Лекция 6 Оценка статистических показателей(часть2)
Лекция 7 Статические модели в форме управления регрессии и методы их определения (часть 1)
Лекция 8 Статические модели в форме управления регрессии и методы их определения (часть 2)
Лекция 9 Статические модели в форме управления регрессии и методы их определения (часть 3)
Лекция 10 Статические модели в форме управления регрессии и методы их определения (часть 4)
Лекция 11 Методы планирования эксперимента (часть 1)
Лекция 12 Методы планирования эксперимента (часть 2)
Лекция 13 Методы планирования эксперимента (часть 3)
Лекция 14 Методы планирования эксперимента (часть 4)
Лекция 15 Методы планирования эксперимента (часть 5)
Модуль 2. Моделирование и идентификация динамических характеристик объектов
Тема3 Моделирование и идентификация динамических характеристик объектов
Лекция 16 Множество моделей, структуры моделей (часть 1)
Лекция 17 Множество моделей, структуры моделей (часть 2)
Лекция 18 Идентификация динамических систем
Лекция 19 Определение частотных характеристик.
Лекция 20 Определение переходных характеристик
Тема 4 Параметрическая статистическая идентификация
Лекция 21 Основные характеристики времянных рядов
Лекция 22 Параметрическая статистическая идентификация (часть 1)
Лекция 23 Параметрическая статистическая идентификация (часть 2)
Лекция 24 Параметрическая статистическая идентификация (часть 3)
Лекция 25 Параметрическая статистическая идентификация (часть 4)
Лекция 26 Параметрическая статистическая идентификация (часть 5)
Лекция 27 Параметрическая статистическая идентификация (часть 6)
Тема 4 Специальное программное обеспечение задач моделирования
Лекция 28 Специальное программное обеспечение задач моделирования (часть 1)
Лекция 29 Сециальное программное обеспечение задач моделирования (часть 2)
Лекция 30 Сециальное программное обеспечение задач моделирования (часть 2)
Приложение А. Условные обозначения
Приложение Б. Глоссарий. Основная терминология
Методическое обеспечение дисциплины и ТСО.
Учебники, учебные пособия, методические указания, конспекты лекций, справочники и др.
Плакаты, слайды, видео- и телефильмы, программы для ЭВМ (номера, полные названия)
Радиус сферы, на которой лежат точки плана ПФЭ 2n при двух уровнях варьирования факторов с диапазоном 1 составляет (Рисунок 13.2)
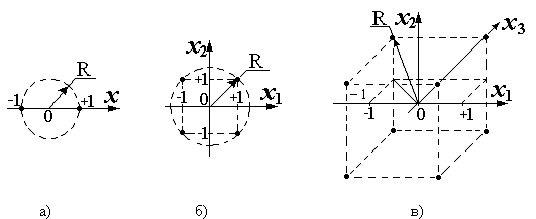
Рисунок 13.2 -. Радиус окружности (сферы), на которой лежат точки плана ПФЭ 2n при диапазоне варьирования факторов от –1 до +1:
а) - n=1, ;
б) - n=2, ;
в) - n=3,
.
Таким образом, при построении РОЦКП с ядром из плана ПФЭ 2n плечо “звездных” точек определяется числом факторов
.
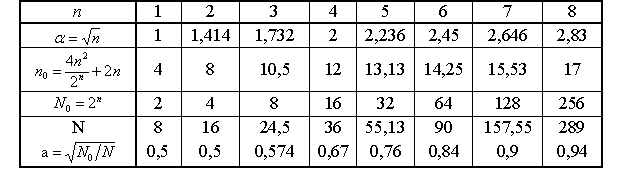
Раннее при определении параметров ортогонального композиционного плана второго порядка с ядром из плана ПФЭ 2n было получено
,
где - число точек плана ПФЭ,
- полное число точек композиционного плана второго порядка,
- константа преобразования элементов столбцов, соответствующих квадратам факторов.
В этом случае для РОЦКП число наблюдений в центре плана
.
Если n0 не целое, то при практическом построении плана его округляют до целого, но свойство ортогональности плана нарушается.
Параметры РОЦКП в зависимости от числа факторов
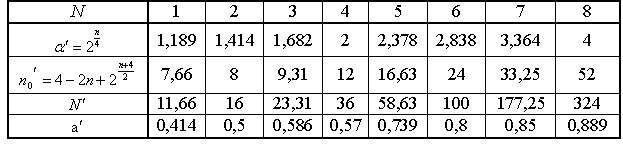
В [1] без вывода для РОЦКП рекомендуется принимать
.
Тогда
.
Параметры РОЦКП по [1]
Пример рототабельного ортогонального центрально-композиционного плана для n = 2.
Параметры плана:

Нет необходимости проводить восемь раз (точки с 9 по 16) опыты в центре плана. Достаточно провести этот опыт один раз и записать результат во все восемь строк. Строки сокращать нельзя, так как нарушается свойство ортогональности, и коэффициенты полинома будут определены неверно.
Коэффициенты квадратичного полинома рассчитаются, как и ранее.
Использован рассмотренный ранее план ПФЭ 22 с добавленными опытами 5-16.
Основная литература
-
Ахназарова С.Л., Кафаров В.В. Методы оптимизации эксперимента в химической технологии: Учебное пособие для вузов. - 2-е изд., перераб. и дополненное. -М.: Высшая школа, 1985. -327с. -
Исмаилов С.У. Современные методы идентификации объектов и систем управления. Методические указания к выполнению лабораторных работ для магистрантов спец. 6М0702. Шымкент, ЮКГУ, 2010 г., -78 с.
Дополнительная литература
-
Практикум по автоматике и системам управления производственными процессами: учеб. пособие для вузов /под ред. И.М.Масленникова. -М.: Химия, 1986. -336с.
Лекция 15 Методы планирования эксперимента (часть 5)
Эволюционное планирование эксперимента
Планирование эксперимента (англ. experimental design techniques) — комплекс мероприятий, направленных на эффективную постановку опытов. Основная цель планирования эксперимента – достижение максимальной точности измерений при минимальном количестве проведенных опытов и сохранении статистической достоверности результатов.
Планирование эксперимента применяется при поиске оптимальных условий, построении интерполяционных формул, выборе значимых факторов, оценке и уточнении констант теоретических моделей и др.
История
Планирование эксперимента возникло в 20-х годах XX века из потребности устранить или хотя бы уменьшить систематические ошибки в сельскохозяйственных исследованиях путем рандомизации условий проведения эксперимента. Процедура планирования оказалась направленной не только на уменьшение дисперсии оцениваемых параметров, но также и на рандомизацию относительно сопутствующих, спонтанно изменяющихся и неконтролируемых переменных. В результате удалось избавится от смещения в оценках. С 1918 г. Р. Фишер начал свою известную серию работ на Рочемстедской агробиологической станции в Англии. В 1935 году появилась его монография «Design of Experiments», давшая название всему направлению. В 1942 году А. Кишен рассмотрел планирование эксперимента по латинским кубам, которое явилось дальнейшим развитием теории латинских квадратов. Затем Р. Фишер независимо опубликовал сведения об ортогональных гипер-греко-латинских кубах и гипер-кубах. Вскоре после этого в 1946 г. Р. Рао рассмотрел их комбинаторные свойства. Дальнейшему развитию теории латинских квадратов посвящены работы Х. Манна (1947 – 1950 гг.). Первое глубокое математическое исследование блок-схемы выполнено Р. Боузом в 1939 г. Вначале была разработана теория сбалансированных неполноблочных планов (BIB-схемы). Затем Р. Боуз, К. Нер и Р. Рао обобщили эти планы и разработали теорию частично сбалансированных неполноблочных планов (РBIB-схемы). С тех пор изучению блок-схем уделяется большое внимание как со стороны специалистов по планированию эксперимента (Ф. Йетс, Г. Кокс, В. Кохрен, В. Федерер, К. Гульден, О. Кемптгорн и другие), так и со стороны специалистов по комбинаторному анализу (Боуз, Ф. Шимамото, В. Клатсворси, С. Шрикханде, А. Гофман и др.). Исследования Р. Фишера знаменуют начало первого этапа развития методов планирования эксперимента. Фишер разработал метод факторного планирования. Йетс предложил для этого метода простую вычислительную схему. Факторное планирование получило широкое распространение. Особенностью
факторного эксперимента является необходимость ставить сразу большое число опытов. В 1945 г. Д. Финни ввел дробные реплики от факторного эксперимента. Это позволило сократить число опытов и открыло дорогу техническим приложениям планирования. Другая возможность сокращения необходимого числа опытов была показана в 1946 г. Р. Плакеттом и Д. Берманом, которые ввели насыщенные факторные планы. Г. Хотеллинг в 1941 г. предложил находить экстремум по экспериментальным данным с использованием степенных разложений и градиента. Следующим важным этапом было введение принципа последовательного шагового экспериментирования. Этот принцип, высказанный в 1947 г. М. Фридманом и Л. Сэвиджем, позволил распространить на экспериментальное определение экстремума – итерацию. Чтобы построить современную теорию планирования эксперимента, не хватало одного звена – формализации объекта исследования. Это звено появилось в 1947 г. после создания Н. Винером теории кибернетики. Кибернетическое понятие «черный ящик», играет в планировании важную роль. В 1951 г. работой американских ученых Дж. Бокса и К. Уилсона начался новый этап развития планирования эксперимента. В ней сформулирована и доведена до практических рекомендаций идея последовательного экспериментального определения оптимальных условий проведения процессов с использованием оценки коэффициентов степенных разложений методом наименьших квадратов, движение по градиенту и отыскание интерполяционного полинома в области экстремума функции отклика (почти стационарной области). В 1954 – 1955 гг. Лж. Бокс, а затем П. Юл. показали, что планирование эксперимента можно использовать при исследовании физико-химических процессов, если априори высказаны одна или несколько возможных гипотез. Направление получило развитие в работах Н. П. Клепикова, С. Н. Соколова и В. В. Федорова в ядерной физике. Третий этап развития теории планирования эксперимента начался в 1957 г., когда Бокс применил свой метод в промышленности. Этот метод стал называться «эволюционным планированием». В 1958 г. Г. Шиффе предложил новый метод планирования эксперимента для изучения физико-химических диаграмм состав – свойство под названием «симплексной решетки». Развитие теории планирование эксперимента в СССР отражено в работах В. В. Налимова, Ю. П. Адлера, Ю. В. Грановского, Е. В. Марковой.
Особенности планирования эксперимента в производственных условиях
При переходе от лабораторных условий к промышленным результатам исследований довольно часто плохо воспроизводятся в основном из-за резко увеличивающегося числа случайных факторов. Поэтому приходится продолжать эксперименты и при промышленном производстве продукции.
С целью уменьшения доли выпуска бракованной продукции при промышленных экспериментах применяют небольшие интервалы варьирования факторов по сравнению с лабораторными исследованиями. Планы промышленных экспериментов составляют таким образом, чтобы путем осторожного изменения факторов получить информацию об изменениях отклика объекта и при этом выпустить качественную продукцию.
Такой подход к планированию промышленных экспериментов был предложен Боксом и получил название "Метод эволюционного планирования эксперимента".
Эволюционное планирование (ЭВОП). Метод экспериментальной оптимизации, сочетающий многократное использование дробных и полных факторных планов с движением по градиенту функции отклика и предназначенный для совершенствования производственных объектов
Существуют различные модификации ЭВОП: обычное ЭВОП (ЭВОП Бокса), последовательный симплексный метод, квадратичное вращаемое ЭВОП и т. п.
Основная литература
-
Ахназарова С.Л., Кафаров В.В. Методы оптимизации эксперимента в химической технологии: Учебное пособие для вузов. - 2-е изд., перераб. и дополненное. -М.: Высшая школа, 1985. -327с. -
Исмаилов С.У. Современные методы идентификации объектов и систем управления. Методические указания к выполнению лабораторных работ для магистрантов спец. 6М0702. Шымкент, ЮКГУ, 2010 г., -78 с.
Дополнительная литература
-
Практикум по автоматике и системам управления производственными процессами: учеб. пособие для вузов /под ред. И.М.Масленникова. -М.: Химия, 1986. -336с. -
Гроп Д. Методы идентификации систем. - М.: Мир, 1979
Модуль 2. Моделирование и идентификация динамических характеристик объектов
Тема3 Моделирование и идентификация динамических характеристик объектов
Лекция 16 Множество моделей, структуры моделей (часть 1)
Математические модели линейных динамических (ММД) объектов и систем и связь между ними. ММД.
Широко используются при анализе и синтезе различных систем автоматизации (см. рисунок 16.1). ММД описывают изменение параметров во времени, в их выражения обязательно прсутствуют производные по времени или другие эквивалентные им параметры. Очень часто (в обоснованных случаях) используют линейные ММД.
Рисунок 16.1 – Объект динамики
Принято обозначать векторы входных воздействий буквой U (управления), векторы выходных воздействий буквой X (состояния) или Y (выходы), векторы возмущающих воздействий буквой V (на рисунке 16.1 – не показаны)
Все ММД можно разделить на классы.
1 Модели для описания непрерывных систем
Линейные дифференциальные уравнения (ДУ) это наиболее общая форма описания динамики, однако их практическое использование и инженерной практике часто бывает сложным.
Наиболее общий вид записи ДУ:
Передаточные функции (ПФ). В инженерной практике часто используются ММД в виде ПФ. Для объектов с самовыравниванием ПФ в общем виде:
 . (n≥m) (16.4)
. (n≥m) (16.4)При использовании «метода площадей» (b1=a1=1) [ ]:
Другие виды, например:
 и т.п. (16.7)
и т.п. (16.7)Очень часто применяют упрощенное выражение ПФ в виде апериодического звена с запаздыванием:
Для объектов без самовыравнивания используется передаточная функция в общем случае используется в виде:

