Файл: Лекции по теории механизмов и машин. Учебное пособие к изучению теоретических основ курса для студентов направлений 050502 Инженерная механика.doc
ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 04.05.2024
Просмотров: 65
Скачиваний: 0
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.

информационные машины применяется для обозначения механических устройств приема и преобразования информации (например, устройства автоматического счета, взвешивания, контроля параметров). Сюда же можно отнести ушедшие в прошлое счетные и вычислительные устройства, работающие на механическом принципе (арифмометры, интеграторы и т. д.). Электронные устройства для математических вычислений и обработки информации (компьютеры и т.п.), у которых выполнение основных операций не связано с механическим движением их частей, строго говоря, машинами не являются.
Развитое машинное устройство, состоящее из машины-двигателя и рабочей машины (в составе одного или нескольких механизмов, например: передаточных, исполнительных, вспомогательных и др.), называют машинным агрегатом.
Примером машинного агрегата может служить схема, предлагаемая студентам для курсового проектирования по ТММ (Рис.1.3).

Рис. 1.3.
1 – машина-двигатель; [2, 3, 4, 5] – рабочая машина
( 2 – передаточный механизм; 3 – главный исполнительный механизм;
4 – кулачковый механизм погрузки; 5 – кулачковый механизм разгрузки)
Механизм - это система тел, предназначенная для преобразования движения одного или нескольких твердых тел1 в требуемое движение других твердых тел [3, 4]. Таким образом, основным признаком механизма является факт преобразования механического движения одного тела (входного) в механическое движение другого тела (выходного). Данное преобразование, как правило, предполагает существование кинематической связи между этими движениями.
Приведем примеры некоторых механизмов:
- редуктор (передаточный механизм) – обеспечивает преобразование вращательного движения входного тела (вала 1) во вращательное движение выходного тела (вала 2) с изменением угловой скорости;
- кривошипно-ползунный механизм (Рис.1.3) – обеспечивает преобразование вращательного движения входного тела 1 (кривошипа) в поступательное движение выходного тела 3 (ползуна).
Теперь, после выяснения сути понятий «машина» и «механизм», можно окончательно ответить на вопрос – могут ли эти понятия быть тождественными?
В частном случае, если отдельно взятый механизм рассматривать как устройство, достаточное для преобразования материала (например, ручной пресс для брикетирования металлической стружки), то этот механизм, одновременно, может быть назван машиной.
В то же самое время, «машина» - это более широкое понятие. В состав машины могут входить один или несколько различных механизмов, а также другие устройства, не имеющие к механизмам никакого отношения (электрические системы пуска, регулирования и т.д.). Наконец, машина может вовсе не содержать механизмов, если, например, исполнительный орган машины соединен с электродвигателем непосредственно, без промежуточных звеньев (т.е напрямую).
Звено. Из данного выше определения механизма следует, что любой механизм – это система взаимодействующих между собой тел (твердых, жидких, газообразных). Твердое тело, входящее в состав механизма называют звеном механизма или просто звеном [3, 4]. Жидкости и газы, входящие в состав гидравлических и пневматических механизмов звеньями этих механизмов не являются. Звенья механизма могут состоять из деталей. Следует различать понятия «звено» и «деталь», несмотря на то, что этими словами часто называют одну и ту же составную часть механизма. В этой связи понятию «звено» уместно дать другое определение.
Звено – одна или группа деталей, жестко соединенных между собой и выполняющих совместное движение как одно целое (т.е. относительное движение деталей отсутствует).
П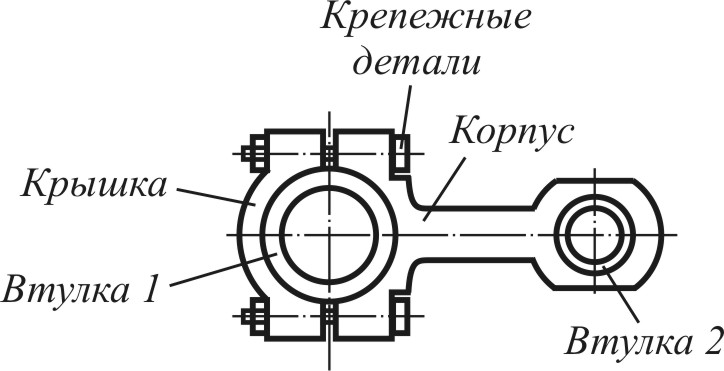 римером звена может служить шатун двигателя внутреннего сгорания (Рис.1.4), состоящий из жестко соединенных между собой деталей: корпуса, шатунной крышки, шатунных подшипников (втулок 1 и 2) и крепежных деталей.
римером звена может служить шатун двигателя внутреннего сгорания (Рис.1.4), состоящий из жестко соединенных между собой деталей: корпуса, шатунной крышки, шатунных подшипников (втулок 1 и 2) и крепежных деталей.
Рис.1.4
З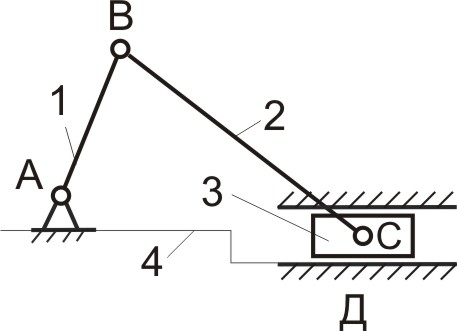 венья, входящие в состав механизма, подразделяются на подвижные и неподвижные 1. Неподвижное звено в ТММ называют «стойкой». На рис.1.5 представлен четырехзвенный механизм, в котором: 1, 2, 3 – подвижные звенья; 4 – неподвижное звено (стойка).2
венья, входящие в состав механизма, подразделяются на подвижные и неподвижные 1. Неподвижное звено в ТММ называют «стойкой». На рис.1.5 представлен четырехзвенный механизм, в котором: 1, 2, 3 – подвижные звенья; 4 – неподвижное звено (стойка).2
Рис.1.5
Входное, выходное и промежуточные звенья. Среди подвижных звеньев механизма можно выделить входное звено, выходное звено и промежуточные звенья. Входное звено – это звено, которому сообщается движение, преобразуемое механизмом в требуемые движения других звеньев [3, 4]. Выходное звено – это звено, совершающее движение, для выполнения которого предназначен механизм [3, 4]. Звенья, находящиеся структурно между входным и выходным звеном называют промежуточными. В большинстве случаев механизм имеет одно входное и одно выходное звено. В то же время, встречаются механизмы с одним входным и несколькими выходными звеньями (например, дифференциальный механизм привода колес автомобиля) либо наоборот. В общем случае число входных звеньев, как и число выходных звеньев, может быть различным.
3
Кинематические пары. Звенья в механизме соединяются между собой подвижно. Подвижное соединение двух соприкасающихся звеньев называется кинематической парой [1, 2]. Похожее определение приводится в [3, 4]: «Кинематическая пара – соединение двух соприкасающихся звеньев, допускающее их относительное движение». Допускается также применение сокращенного термина «пара» [4].
В приведенном на рис.1.5 механизме кинематические пары обозначены буквами А, В, С, Д. Каждая из пар является подвижным соединением двух звеньев: А → (4,1); В → (1,2); С → (2,3); Д → (3,4).
В общем случае звено может образовывать несколько подвижных соединений с другими звеньями.
На рис.1.6,а изображен шарнирный шестизвенник, в котором выделен шарнир, обеспечивающий подвижное соединение звеньев 2, 3 и 4. При структурном анализе механизма считают, что в этом шарнире сосредоточено 2 подвижных соединения, а, значит, 2 кинематические пары. К этому выводу можно прийти логически, если мысленно заменить указанный шарнир двумя шарнирами, принадлежащими звену 3 и расположенными в непосредственной близости от заменяемого (Рис.1.6, б). Суть первого шарнира – кинематическая пара для звеньев 2 и 3, суть второго шарнира – кинематическая пара для звеньев 3 и 4.
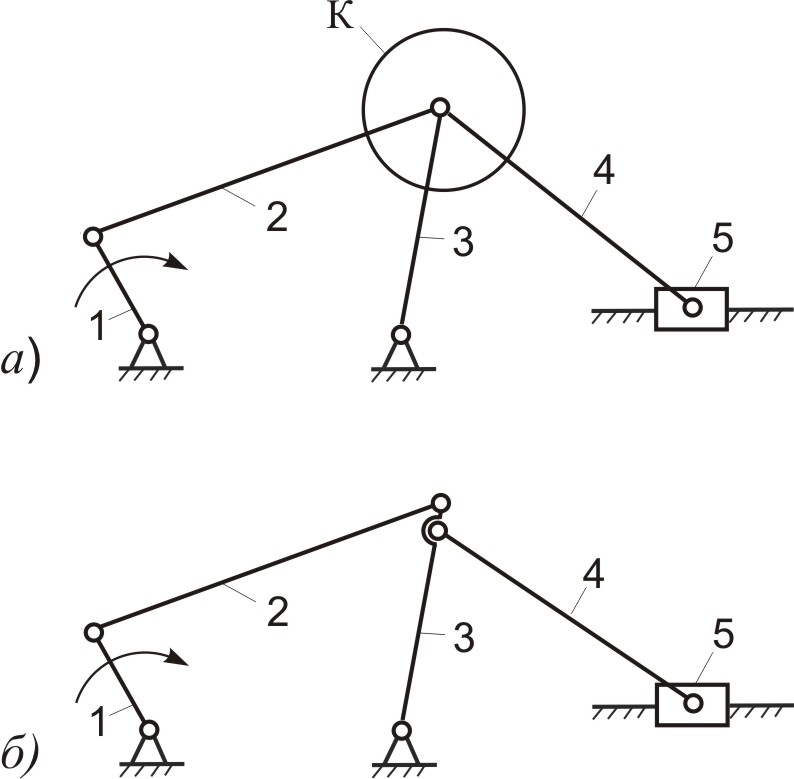
Рис.1.6
В общем случае число вращательных кинематических пар при соединении n звеньев в одном шарнире можно определить по формуле:
Р5 = n - 1
где n – количество звеньев, входящих в шарнир.
Кинематическая цепь – система звеньев, образующих между собой кинематические пары [3]. Кинематические цепи (Рис.1.7) подразделяются на плоские и пространственные, простые и сложные, замкнутые и незамкнутые.
Плоская кинематическая цепь – все звенья двигаются в плоскости, параллельной некоторой одной плоскости.
Пространственная кинематическая цепь – звенья двигаются в различных плоскостях.
Простая кинематическая цепь – каждое звено образует с другими звеньями не более 2-х кинематических пар (в литературе можно встретить другую терминологию – каждое звено «входит» не более чем в 2 пары [1, 2, 3] ).
Сложная кинематическая цепь – хотя бы одно звено образует с другими звеньями более 2-х кинематических пар (входит более чем в 2 кинематические пары).
Замкнутая кинематическая цепь - звенья образуют один или несколько замкнутых контуров.
Незамкнутая кинематическая цепь - звенья не образуют замкнутых контуров.

Рис.1.7
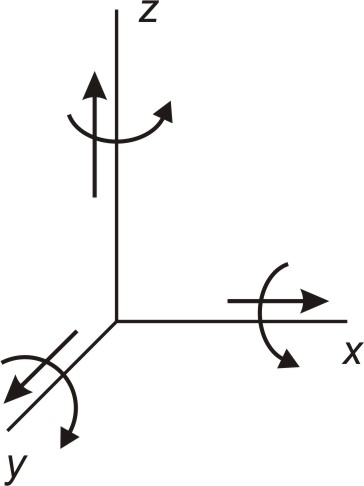
Абсолютно свободное тело в трехмерном пространстве имеет 6 степеней свободы (степеней подвижности). Это означает, что ему может быть сообщено любое из 6-ти независимых перемещений (три линейных и три угловых). Для изображенной на рис.1.8 системы координат возможные независимые перемещения показаны стрелками.
Рис.1.8
В механизме звенья входят с другими звеньями в кинематические пары. Условие постоянства контакта звеньев в паре делает эти звенья не свободными. При этом, каждая кинематическая пара, в зависимости от своих свойств, накладывает ограничения на те или иные возможные перемещения входящего в кинематическую пару звена (т.е. делает их невозможными). Кинематическая пара не может ограничить все 6 перемещений, т.к. в этом случае соединение звеньев становится неподвижным. Кинематическая пара не может ограничить 0 (ноль) перемещений, т.к. тогда звенья теряют связь между собой и становятся абсолютно свободными телами. Таким образом, количество наложенных парой ограничений может колебаться в пределах от 1 до 5. Эти ограничения в механике называют «условиями связи». Все многообразие видов кинематических пар можно классифицировать по количеству условий связи и отдельным комбинациям их. Эта классификация приведена ниже (Таблица 1.1).
Количество условий связи, в свою очередь, определяет класс и степень подвижности кинематической пары.
Класс кинематической пары (ККП) показывает количество ограничений, которые накладываются парой на взаимное перемещение двух звеньев. В структурных формулах класс пары обозначают нижним индексом. Например, запись р5 обозначает число кинематических пар 5-го класса.
Степень подвижности кинематической пары (СПКП), наоборот, показывает количество разрешенных парой относительных движений двух звеньев.
Из сказанного выше очевидна связь:
(СПКП) = 6 – (ККП) (1.1)
Учитывая (1.1) кинематические пары:
- 5-го класса еще называют 1-но ходовыми (1-но подвижными);
- 4-го класса - // - 2-х ходовыми (2-х подвижными);
- 3-го класса - // - 3-х ходовыми и т.д.
Любая кинематическая пара образуется подвижным контактом точек, принадлежащих двум звеньям. Совокупность поверхностей, линий и отдельных точек звена, по которым оно может соприкасаться с другим звеном, образуя кинематическую пару, называется элементом кинематической пары.
Используя это понятие, можно классифицировать кинематические пары на низшие и высшие.
Низшие кинематические пары образованы элементами пар, контактирующими по поверхности.
Высшие кинематические пары образованы элементами пар, контактирующими по линии или в точке.
Развитое машинное устройство, состоящее из машины-двигателя и рабочей машины (в составе одного или нескольких механизмов, например: передаточных, исполнительных, вспомогательных и др.), называют машинным агрегатом.
Примером машинного агрегата может служить схема, предлагаемая студентам для курсового проектирования по ТММ (Рис.1.3).
Рис. 1.3.
1 – машина-двигатель; [2, 3, 4, 5] – рабочая машина
( 2 – передаточный механизм; 3 – главный исполнительный механизм;
4 – кулачковый механизм погрузки; 5 – кулачковый механизм разгрузки)
Механизм - это система тел, предназначенная для преобразования движения одного или нескольких твердых тел1 в требуемое движение других твердых тел [3, 4]. Таким образом, основным признаком механизма является факт преобразования механического движения одного тела (входного) в механическое движение другого тела (выходного). Данное преобразование, как правило, предполагает существование кинематической связи между этими движениями.
Приведем примеры некоторых механизмов:
- редуктор (передаточный механизм) – обеспечивает преобразование вращательного движения входного тела (вала 1) во вращательное движение выходного тела (вала 2) с изменением угловой скорости;
- кривошипно-ползунный механизм (Рис.1.3) – обеспечивает преобразование вращательного движения входного тела 1 (кривошипа) в поступательное движение выходного тела 3 (ползуна).
Теперь, после выяснения сути понятий «машина» и «механизм», можно окончательно ответить на вопрос – могут ли эти понятия быть тождественными?
В частном случае, если отдельно взятый механизм рассматривать как устройство, достаточное для преобразования материала (например, ручной пресс для брикетирования металлической стружки), то этот механизм, одновременно, может быть назван машиной.
В то же самое время, «машина» - это более широкое понятие. В состав машины могут входить один или несколько различных механизмов, а также другие устройства, не имеющие к механизмам никакого отношения (электрические системы пуска, регулирования и т.д.). Наконец, машина может вовсе не содержать механизмов, если, например, исполнительный орган машины соединен с электродвигателем непосредственно, без промежуточных звеньев (т.е напрямую).
Звено. Из данного выше определения механизма следует, что любой механизм – это система взаимодействующих между собой тел (твердых, жидких, газообразных). Твердое тело, входящее в состав механизма называют звеном механизма или просто звеном [3, 4]. Жидкости и газы, входящие в состав гидравлических и пневматических механизмов звеньями этих механизмов не являются. Звенья механизма могут состоять из деталей. Следует различать понятия «звено» и «деталь», несмотря на то, что этими словами часто называют одну и ту же составную часть механизма. В этой связи понятию «звено» уместно дать другое определение.
Звено – одна или группа деталей, жестко соединенных между собой и выполняющих совместное движение как одно целое (т.е. относительное движение деталей отсутствует).
П
римером звена может служить шатун двигателя внутреннего сгорания (Рис.1.4), состоящий из жестко соединенных между собой деталей: корпуса, шатунной крышки, шатунных подшипников (втулок 1 и 2) и крепежных деталей.Рис.1.4
З
венья, входящие в состав механизма, подразделяются на подвижные и неподвижные 1. Неподвижное звено в ТММ называют «стойкой». На рис.1.5 представлен четырехзвенный механизм, в котором: 1, 2, 3 – подвижные звенья; 4 – неподвижное звено (стойка).2 Рис.1.5
Входное, выходное и промежуточные звенья. Среди подвижных звеньев механизма можно выделить входное звено, выходное звено и промежуточные звенья. Входное звено – это звено, которому сообщается движение, преобразуемое механизмом в требуемые движения других звеньев [3, 4]. Выходное звено – это звено, совершающее движение, для выполнения которого предназначен механизм [3, 4]. Звенья, находящиеся структурно между входным и выходным звеном называют промежуточными. В большинстве случаев механизм имеет одно входное и одно выходное звено. В то же время, встречаются механизмы с одним входным и несколькими выходными звеньями (например, дифференциальный механизм привода колес автомобиля) либо наоборот. В общем случае число входных звеньев, как и число выходных звеньев, может быть различным.
3
Кинематические пары. Звенья в механизме соединяются между собой подвижно. Подвижное соединение двух соприкасающихся звеньев называется кинематической парой [1, 2]. Похожее определение приводится в [3, 4]: «Кинематическая пара – соединение двух соприкасающихся звеньев, допускающее их относительное движение». Допускается также применение сокращенного термина «пара» [4].
В приведенном на рис.1.5 механизме кинематические пары обозначены буквами А, В, С, Д. Каждая из пар является подвижным соединением двух звеньев: А → (4,1); В → (1,2); С → (2,3); Д → (3,4).
В общем случае звено может образовывать несколько подвижных соединений с другими звеньями.
-
Внимание !!! Соединение в одном шарнире более чем 2-х звеньев не является одной кинематической парой.
На рис.1.6,а изображен шарнирный шестизвенник, в котором выделен шарнир, обеспечивающий подвижное соединение звеньев 2, 3 и 4. При структурном анализе механизма считают, что в этом шарнире сосредоточено 2 подвижных соединения, а, значит, 2 кинематические пары. К этому выводу можно прийти логически, если мысленно заменить указанный шарнир двумя шарнирами, принадлежащими звену 3 и расположенными в непосредственной близости от заменяемого (Рис.1.6, б). Суть первого шарнира – кинематическая пара для звеньев 2 и 3, суть второго шарнира – кинематическая пара для звеньев 3 и 4.
Рис.1.6
В общем случае число вращательных кинематических пар при соединении n звеньев в одном шарнире можно определить по формуле:
Р5 = n - 1
где n – количество звеньев, входящих в шарнир.
Кинематическая цепь – система звеньев, образующих между собой кинематические пары [3]. Кинематические цепи (Рис.1.7) подразделяются на плоские и пространственные, простые и сложные, замкнутые и незамкнутые.
Плоская кинематическая цепь – все звенья двигаются в плоскости, параллельной некоторой одной плоскости.
Пространственная кинематическая цепь – звенья двигаются в различных плоскостях.
Простая кинематическая цепь – каждое звено образует с другими звеньями не более 2-х кинематических пар (в литературе можно встретить другую терминологию – каждое звено «входит» не более чем в 2 пары [1, 2, 3] ).
Сложная кинематическая цепь – хотя бы одно звено образует с другими звеньями более 2-х кинематических пар (входит более чем в 2 кинематические пары).
Замкнутая кинематическая цепь - звенья образуют один или несколько замкнутых контуров.
Незамкнутая кинематическая цепь - звенья не образуют замкнутых контуров.
Рис.1.7
-
Классификация кинематических пар по количеству условий связи. Низшие и высшие кинематические пары.
Абсолютно свободное тело в трехмерном пространстве имеет 6 степеней свободы (степеней подвижности). Это означает, что ему может быть сообщено любое из 6-ти независимых перемещений (три линейных и три угловых). Для изображенной на рис.1.8 системы координат возможные независимые перемещения показаны стрелками.
Рис.1.8
В механизме звенья входят с другими звеньями в кинематические пары. Условие постоянства контакта звеньев в паре делает эти звенья не свободными. При этом, каждая кинематическая пара, в зависимости от своих свойств, накладывает ограничения на те или иные возможные перемещения входящего в кинематическую пару звена (т.е. делает их невозможными). Кинематическая пара не может ограничить все 6 перемещений, т.к. в этом случае соединение звеньев становится неподвижным. Кинематическая пара не может ограничить 0 (ноль) перемещений, т.к. тогда звенья теряют связь между собой и становятся абсолютно свободными телами. Таким образом, количество наложенных парой ограничений может колебаться в пределах от 1 до 5. Эти ограничения в механике называют «условиями связи». Все многообразие видов кинематических пар можно классифицировать по количеству условий связи и отдельным комбинациям их. Эта классификация приведена ниже (Таблица 1.1).
Количество условий связи, в свою очередь, определяет класс и степень подвижности кинематической пары.
Класс кинематической пары (ККП) показывает количество ограничений, которые накладываются парой на взаимное перемещение двух звеньев. В структурных формулах класс пары обозначают нижним индексом. Например, запись р5 обозначает число кинематических пар 5-го класса.
Степень подвижности кинематической пары (СПКП), наоборот, показывает количество разрешенных парой относительных движений двух звеньев.
Из сказанного выше очевидна связь:
(СПКП) = 6 – (ККП) (1.1)
Учитывая (1.1) кинематические пары:
- 5-го класса еще называют 1-но ходовыми (1-но подвижными);
- 4-го класса - // - 2-х ходовыми (2-х подвижными);
- 3-го класса - // - 3-х ходовыми и т.д.
Любая кинематическая пара образуется подвижным контактом точек, принадлежащих двум звеньям. Совокупность поверхностей, линий и отдельных точек звена, по которым оно может соприкасаться с другим звеном, образуя кинематическую пару, называется элементом кинематической пары.
Используя это понятие, можно классифицировать кинематические пары на низшие и высшие.
Низшие кинематические пары образованы элементами пар, контактирующими по поверхности.
Высшие кинематические пары образованы элементами пар, контактирующими по линии или в точке.

