Файл: Лекции по теории механизмов и машин. Учебное пособие к изучению теоретических основ курса для студентов направлений 050502 Инженерная механика.doc
ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 04.05.2024
Просмотров: 66
Скачиваний: 0
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.

1
После определения всех необходимых понятий приведем классификацию кинематических пар по классам и отдельным видам с указанием принадлежности пары к низшим или высшим.
Таблица 1.1
Классификация кинематических пар
Таблица 1.1 (продолжение)
При сопоставлении степени подвижности винтовой кинематической пары (1-но подвижная) с числом разрешаемых парой движений (на рисунке показано два – линейное перемещение винта в направлении оси и поворот винта вокруг оси) может показаться, что допущена ошибка. Действительно, при 2-х относительных движениях звеньев степень подвижности пары должна равняться 2-м???
На самом деле, никакой ошибки и противоречия здесь нет. Дело в том, что между указанными 2-мя перемещениями существует однозначная кинематическая связь. В силу этой кинематической связи, задав угол поворота винта, получают строго определенное перемещение по оси, и наоборот. Следовательно, независимое перемещение только одно, а степень подвижности винтовой кинематической пары, определяемая числом независимых относительных перемещений, равна 1.
Вопросы для самоконтроля
Лекция 2
Структурный анализ механизмов
Используя понятие «кинематическая цепь» можно дать другое определение понятию «механизм».
Механизм – это кинематическая цепь, в которой по заданному положению (или закону движения) относительно стойки одного входного звена (или нескольких входных звеньев) однозначно определяется положение (или закон движения) относительно стойки всех других звеньев [1].
Для изучения структуры или кинематики движения, механизмы изображают в виде абстрактных схем. Эти схемы называют соответственно структурными и кинематическими.
Структурная схема – это условное изображение механизма в виде кинематической цепи с использованием общепринятых обозначений звеньев и кинематических пар. Структурная схема строится без учета масштаба. Она показывает, из каких звеньев состоит механизм (входное, выходное, промежуточные) и определяет последовательность и способ их соединения. Структурная схема задается при структурном анализе и является целью структурного синтеза механизма. Структурную схему часто еще называют принципиальной [2].
Кинематическая схема – условное изображение механизма с использованием стандартных обозначений звеньев и кинематических пар, выполненное с учетом реальных пропорций механизма, т.е. в масштабе. Используется для кинематического исследования механизма (определения положений звеньев, определения перемещений отдельных точек и звеньев, траекторий движения точек, их скоростей, ускорений, угловых скоростей и угловых ускорений звеньев).
На рис.2.1 изображены примеры структурных схем простых плоских механизмов: кривошипно-ползунного (а), кривошипно-коромыслового (б) и криво- шипно-кулисного (в). Не трудно догадаться, что механизмы названы по названиям входного и выходного звеньев.
Рис.2.1
Масштабы и масштабные коэффициенты.
При использовании графических методов решения задач ТММ, физические величины изображают на чертеже в виде отрезков той или иной длины. Для этого используется понятия «масштаба» или «масштабного коэффициента» изображения физической величины. Эти понятия не тождественны, как может показаться на первый взгляд. Кроме того, они не похожи на масштабы географических карт, генеральных планов предприятий и т.д.
Масштаб в ТММ показывает длину отрезка в
мм, изображающую единицу физической величины [3]. Масштабным коэффициентом физической величины называют величину, обратную масштабу.
Масштабный коэффициент определяется отношением числового значения физической величины в свойственных ей единицах к длине отрезка в мм, изображающего эту величину. Отсюда получают ту или иную размерность масштабных коэффициентов.
Приведем несколько примеров масштабных коэффициентов, указав их характерные размерности:
Понятие масштаба физической величины используется в ТММ не так часто. Гораздо чаще имеют дело с масштабными коэффициентами.
Если механизм имеет одну степень подвижности, то для определения положения всех его звеньев (при известной их форме и размерах) достаточно знать положение относительно стойки одного звена. Угловую или линейную координату положения этого звена называют обобщенной координатой для всего механизма.
Обобщенная координата – это независимая координата (линейная или угловая), определяющая положение относительно стойки одного из звеньев механизма и позволяющая определить положение (относительно стойки) всех других звеньев. Для кинематического исследования механизму присваивают одну или несколько обобщенных координат. Число обобщенных координат для конкретного механизма определяется числом его степеней подвижности.
Звено, которому приписывается обобщенная координата, называют начальным. Часто за начальное принимают входное звено механизма. В то же время, если это удобно для последующего анализа механизма, за начальное может быть принято выходное звено или одно из промежуточных.
Если механизм имеет несколько степеней подвижности – назначается несколько начальных звеньев и соответствующих им обобщенных координат.
Структурная формула – это формула, по которой определяется степень подвижности механизма в зависимости от числа подвижных звеньев и количества и вида кинематических пар.
Для вывода структурной формулы пространственного механизма рассмотрим механизм с подвижными звеньями. Если предположить, что все звеньев являются абсолютно свободными телами, механизм имел бы
подвижными звеньями. Если предположить, что все звеньев являются абсолютно свободными телами, механизм имел бы  степеней подвижности. В действительности, звенья не являются свободными, т.к. образуют кинематические пары и взаимодействуют с другими звеньями механизма. При этом, каждая кинематическая пара накладывает столько ограничений на взаимное перемещение двух соприкасающихся звеньев, сколько условий связи она имеет. Таким образом, наличие в системе одной кинематической пары уменьшает степень подвижности механизма на величину, численно равную классу кинематической пары. Наличие
степеней подвижности. В действительности, звенья не являются свободными, т.к. образуют кинематические пары и взаимодействуют с другими звеньями механизма. При этом, каждая кинематическая пара накладывает столько ограничений на взаимное перемещение двух соприкасающихся звеньев, сколько условий связи она имеет. Таким образом, наличие в системе одной кинематической пары уменьшает степень подвижности механизма на величину, численно равную классу кинематической пары. Наличие  кинематических пар уменьшает степень подвижности системы на величину, равную сумме произведений числа пар на их класс. Отсюда следует, что механизм, содержащий подвижных звеньев и :
кинематических пар уменьшает степень подвижности системы на величину, равную сумме произведений числа пар на их класс. Отсюда следует, что механизм, содержащий подвижных звеньев и :
- кинематических пар 5 класса ……… шт.
шт.
- кинематических пар 4 класса ……… шт.
шт.
- кинематических пар 3 класса ……… шт.
шт.
- кинематических пар 2 класса ……… шт.
шт.
- кинематических пар 1 класса ……… шт.
шт.
имеет степень подвижности, определяемую выражением (2.1):
 (2.1)
(2.1)
Формула (2.1) называется структурной формулой пространственного механизма (формула П.И.Сомова - А.П.Малышева).
Применив аналогичные рассуждения для плоского механизма, и учитывая число степеней свободы в плоскости (не более 3), получим структурную формулу П.Л.Чебышева
После определения всех необходимых понятий приведем классификацию кинематических пар по классам и отдельным видам с указанием принадлежности пары к низшим или высшим.
Таблица 1.1
Классификация кинематических пар
| Класс кинематической пары | Число степеней свободы | Название пары | Рисунок | Условн. обозначение |
| 1 | 2 | 3 | 4 | 5 |
| 1 | 6 – 1 = 5 5-ти подвижная | шар–плоскость, высшая |  | |
| 2 | 6 – 2 = 4 4-х подвижная | цилиндр-плоскость, высшая |  | |
| 3 | 6 - 3 = 3 3-х подвижная | сферический шарнир, низшая |  | |
| 3 | 6 - 3 = 3 3-х подвижная | плоская, низшая |  | |
| 4 | 6 - 4 = 2 2-х подвижная | пространств. цилиндрич. шарнир, низшая |  | |
Таблица 1.1 (продолжение)
| 1 | 2 | 3 | 4 | 5 |
| 5 | 6 - 5 = 1 1-но подвижная | поступательная, низшая | 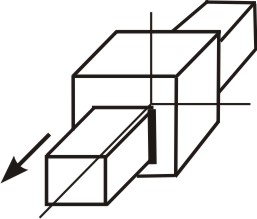 | |
| 5 | 6 - 5 = 1 1-но подвижная | вращательная или плоский цилиндрический шарнир, низшая | 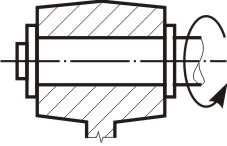 | |
| 5 | 6 - 5 = 1 1-но подвижная | винтовая |  | |
При сопоставлении степени подвижности винтовой кинематической пары (1-но подвижная) с числом разрешаемых парой движений (на рисунке показано два – линейное перемещение винта в направлении оси и поворот винта вокруг оси) может показаться, что допущена ошибка. Действительно, при 2-х относительных движениях звеньев степень подвижности пары должна равняться 2-м???
На самом деле, никакой ошибки и противоречия здесь нет. Дело в том, что между указанными 2-мя перемещениями существует однозначная кинематическая связь. В силу этой кинематической связи, задав угол поворота винта, получают строго определенное перемещение по оси, и наоборот. Следовательно, независимое перемещение только одно, а степень подвижности винтовой кинематической пары, определяемая числом независимых относительных перемещений, равна 1.
Вопросы для самоконтроля
-
Объясните смысл понятий «машина», «механизм», «кинематическая цепь», «звено», «кинематическая пара». -
В чем суть деления кинематических пар на классы? Сколько этих классов? -
Как связаны класс кинематической пары и ее степень подвижности? -
Приведите примеры одноходовых кинематических пар.
Лекция 2
Структурный анализ механизмов
-
Механизм. Структурная и кинематическая схемы. Масштабные коэффициенты в ТММ. Обобщенная координата. ([1], §6; [2], §2.3) -
Структурные формулы для пространственного и плоского механизмов. ([1], §7-8; [2], §2.4) -
Замена высших кинематических пар низшими. ([1], §10; [2], §3.5) -
Структурные группы Л.В.Ассура. Классификация структурных групп. ([1], §12-13; [2], §2.5) -
Принцип образования механизмов. Класс механизма. Формула строения механизма. ([1], §12-13; [2], §2.5) -
Порядок структурного анализа. ([1], §12-13; [2], §2.5)
-
Механизм. Структурная и кинематическая схемы. Масштабные коэффициенты в ТММ. Обобщенная координата.
Используя понятие «кинематическая цепь» можно дать другое определение понятию «механизм».
Механизм – это кинематическая цепь, в которой по заданному положению (или закону движения) относительно стойки одного входного звена (или нескольких входных звеньев) однозначно определяется положение (или закон движения) относительно стойки всех других звеньев [1].
Для изучения структуры или кинематики движения, механизмы изображают в виде абстрактных схем. Эти схемы называют соответственно структурными и кинематическими.
Структурная схема – это условное изображение механизма в виде кинематической цепи с использованием общепринятых обозначений звеньев и кинематических пар. Структурная схема строится без учета масштаба. Она показывает, из каких звеньев состоит механизм (входное, выходное, промежуточные) и определяет последовательность и способ их соединения. Структурная схема задается при структурном анализе и является целью структурного синтеза механизма. Структурную схему часто еще называют принципиальной [2].
Кинематическая схема – условное изображение механизма с использованием стандартных обозначений звеньев и кинематических пар, выполненное с учетом реальных пропорций механизма, т.е. в масштабе. Используется для кинематического исследования механизма (определения положений звеньев, определения перемещений отдельных точек и звеньев, траекторий движения точек, их скоростей, ускорений, угловых скоростей и угловых ускорений звеньев).
На рис.2.1 изображены примеры структурных схем простых плоских механизмов: кривошипно-ползунного (а), кривошипно-коромыслового (б) и криво- шипно-кулисного (в). Не трудно догадаться, что механизмы названы по названиям входного и выходного звеньев.
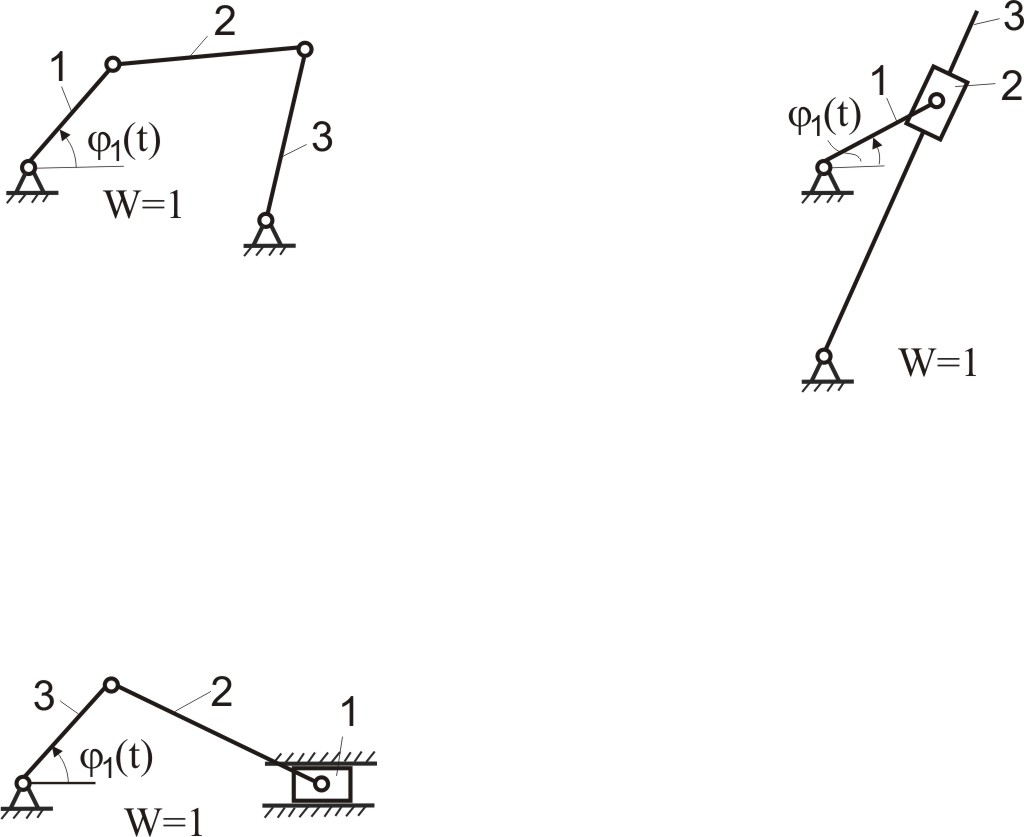 | | |
| 1 – кривошип; 2 – шатун; 3 – ползун а) | 1 – кривошип; 2 – шатун; 3 – коромысло б) | 1 – кривошип; 2 – кулисный камень; 3 – кулиса в) |
Рис.2.1
Масштабы и масштабные коэффициенты.
При использовании графических методов решения задач ТММ, физические величины изображают на чертеже в виде отрезков той или иной длины. Для этого используется понятия «масштаба» или «масштабного коэффициента» изображения физической величины. Эти понятия не тождественны, как может показаться на первый взгляд. Кроме того, они не похожи на масштабы географических карт, генеральных планов предприятий и т.д.
Масштаб в ТММ показывает длину отрезка в
мм, изображающую единицу физической величины [3]. Масштабным коэффициентом физической величины называют величину, обратную масштабу.
Масштабный коэффициент определяется отношением числового значения физической величины в свойственных ей единицах к длине отрезка в мм, изображающего эту величину. Отсюда получают ту или иную размерность масштабных коэффициентов.
Приведем несколько примеров масштабных коэффициентов, указав их характерные размерности:
-
масштабный коэффициент длин - ;
; -
масштабный коэффициент линейных скоростей - ;
; -
масштабный коэффициент линейных ускорений - ;
; -
масштабный коэффициент сил - ;
; -
масштабный коэффициент моментов инерции - и т.д.
и т.д.
Понятие масштаба физической величины используется в ТММ не так часто. Гораздо чаще имеют дело с масштабными коэффициентами.
Если механизм имеет одну степень подвижности, то для определения положения всех его звеньев (при известной их форме и размерах) достаточно знать положение относительно стойки одного звена. Угловую или линейную координату положения этого звена называют обобщенной координатой для всего механизма.
Обобщенная координата – это независимая координата (линейная или угловая), определяющая положение относительно стойки одного из звеньев механизма и позволяющая определить положение (относительно стойки) всех других звеньев. Для кинематического исследования механизму присваивают одну или несколько обобщенных координат. Число обобщенных координат для конкретного механизма определяется числом его степеней подвижности.
Звено, которому приписывается обобщенная координата, называют начальным. Часто за начальное принимают входное звено механизма. В то же время, если это удобно для последующего анализа механизма, за начальное может быть принято выходное звено или одно из промежуточных.
Если механизм имеет несколько степеней подвижности – назначается несколько начальных звеньев и соответствующих им обобщенных координат.
-
Структурные формулы для пространственного и плоского механизмов.
Структурная формула – это формула, по которой определяется степень подвижности механизма в зависимости от числа подвижных звеньев и количества и вида кинематических пар.
Для вывода структурной формулы пространственного механизма рассмотрим механизм с
- кинематических пар 5 класса ………
- кинематических пар 4 класса ………
- кинематических пар 3 класса ………
- кинематических пар 2 класса ………
- кинематических пар 1 класса ………
имеет степень подвижности, определяемую выражением (2.1):
Формула (2.1) называется структурной формулой пространственного механизма (формула П.И.Сомова - А.П.Малышева).
Применив аналогичные рассуждения для плоского механизма, и учитывая число степеней свободы в плоскости (не более 3), получим структурную формулу П.Л.Чебышева

