Файл: Лекции по теории механизмов и машин. Учебное пособие к изучению теоретических основ курса для студентов направлений 050502 Инженерная механика.doc
ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 04.05.2024
Просмотров: 68
Скачиваний: 0
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.

Из формулы следует, что присоединенная кинематическая цепь не имеет необходимой для структурной группы нулевой степени подвижности. Следовательно, группой Ассура она не является.
Группы Ассура классифицируют по классам и порядкам.
Класс группы Ассура, по предложению И.И.Артоболевского1, определяется числом кинематических пар, образующих в группе наиболее сложный замкнутый контур [1, 2]. Исключение составляют двухповодковые структурные группы, не имеющие замкнутых контуров и отнесенные условно к группам II класса.
Порядок структурной группы определяется числом элементов звеньев, которыми группа подсоединяется к основному механизму [1, 2].
Для закрепления материала, приведем несколько примеров.
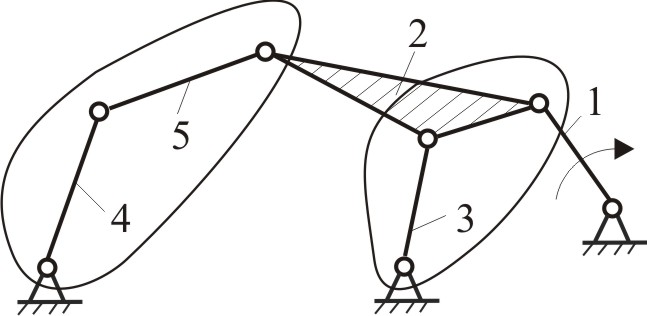
На рис.2.7 изображены структурные группы с указанием их класса и порядка. Проверьте себя, определив степень подвижности, класс и порядок структурных групп самостоятельно.
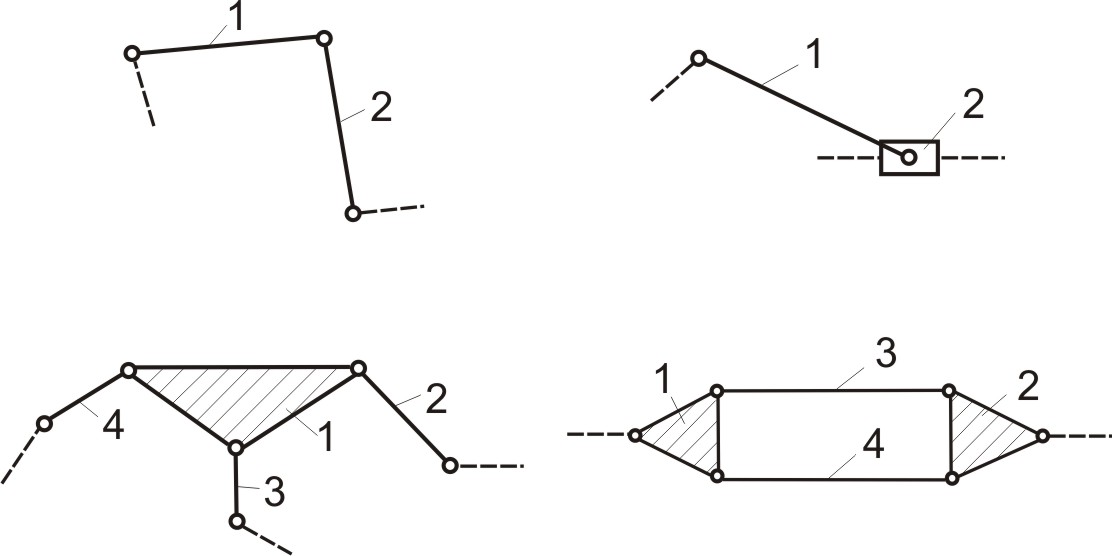 | |
| а) W = 3·2 – 2·3 = 0 II класс, 2-й порядок | б) W = 3·2 – 2·3 = 0 II класс, 2-й порядок |
| | |
| в) W = 3·4 – 2·6 = 0 III класс, 3-й порядок | в) W = 3·4 – 2·6 = 0 IV класс, 2-й порядок |
Рис.2.7
-
Принцип образования механизмов. Класс механизма. Формула строения механизма.
Разработанная Л.В.Ассуром структурная классификация плоских рычажных механизмов позволяет сформулировать единый принцип образования рычажных механизмов любой сложности. Суть этого принципа удобно показать на примере образования условного механизма с W= 1, в состав которого входят только двухповодковые структурные группы.
В этом случае, механизм можно образовать за несколько этапов:
1-й этап
Создание первичного механизма (А). Первичный механизм 1 создается присоединением к стойке первого подвижного звена 2. Это звено и стойка образуют кинематическую пару 5-го класса, поэтому степень подвижности первичного механизма будет равна W= 3 · 1 – 2 · 1 = 1.
2-й этап
Присоединение к первичному механизму (А) первой структурной группы. Присоединение осуществляют элементами внешних пар по правилу - один из поводков группы присоединяют к начальному звену первичного механизма, а другой – к стойке. Полученная система звеньев образует механизм (Б) более сложной (по сравнению с первичным механизмом) структуры.
3-й и последующие этапы (если они требуются)
Последовательное присоединение к механизму (Б) других структурных групп и образование механизмов (В), (Г) и т.д. Группы могут присоединяться к любым, но разным звеньям. Присоединение обоих поводков групп к одному звену не допускается 1.
Применив формулу Чебышева, можно убедиться, что степень подвижности механизма на любом из этапов его создания всегда остается неизменной и равной W= 1.
Из представленного алгоритма следует, что начальное звено первичного механизма при последующем наслоении структурных групп становится входным звеном все более усложняющегося механизма. Кроме того, в силу нулевой степени подвижности структурных групп, степень подвижности механизма до и после подсоединения групп является неизменной.
Принцип образования механизмов с W= 2 и более остается таким же. Следует только учитывать, что число первичных механизмов всегда должно соответствовать W.
Зная принцип образования механизмов, легко понять принцип их разборки. Он заключается в последовательном отделении структурных групп. После отделения последней, должны остаться один или несколько первичных механизмов.
Класс механизма определяется наивысшим классом структурной группы, входящей в состав механизма.
Формула строения механизма – это формула, показывающая, в какой последовательности к первичному механизму подсоединяются те или иные структурные группы. Формула строения записывается с указанием класса структурных групп. Примеры формул приведены на рис.2.8.
В завершении раздела, посвященного принципам построения механизмов, уместно привести примеры простых механизмов, образованных двухповодковыми структурными группами различных видов (модификаций).
Таблица 2.3
Виды двухповодковых структурных групп и механизмы,
созданные на их основе
| № | Вид (модификация) структурной группы | Пример схемы механизма, в состав которого входит группа данного вида |
| 1 | 2 | 3 |
| 1 |  | Кривошипно-коромысловый 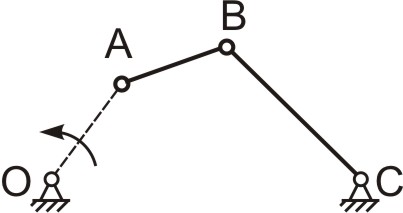 |
| 2 |  | Кривошипно-ползунный 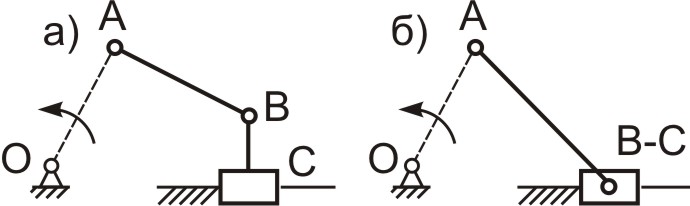 |
Таблица 2.3 (продолжение)
| № | Вид (модификация) структурной группы | Пример схемы механизма, в состав которого входит группа данного вида |
| 1 | 2 | 3 |
| 3 | 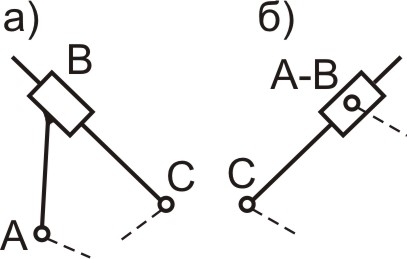 | Кривошипно-кулисный 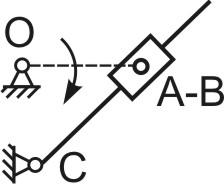 |
| 4 |  | Тангенсный 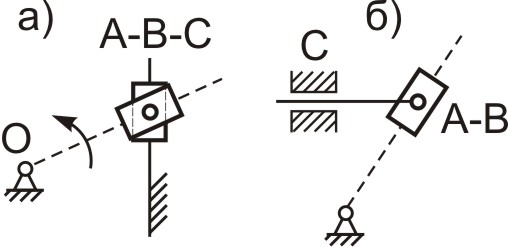 |
| 5 | 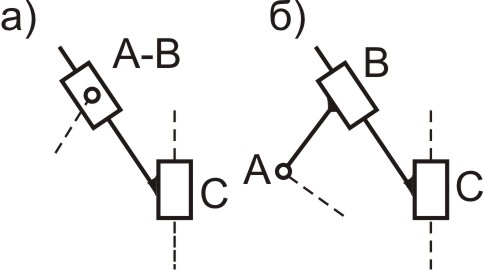 | Кулисные механизмы  а) муфта Ольдгейма; б) механизм сенокосилки; в) механизм строгального станка; г) механизм нитеводителя швейной машины (кулиса Вольфа). |
-
Порядок структурного анализа
Изложенные выше сведения позволяют выполнить структурный анализ механизма.
Процедура структурного анализа включает решение следующих задач:
-
Определение степени подвижности механизма. -
Условное разделение механизма на структурные группы и первичный механизм. Определение класса структурных групп. -
Составление формулы строения механизма. -
Определение класса механизма.
Примечание.
Выполнение структурного анализа, как правило, предшествует кинематическому и динамическому расчету. Это делается не случайно. Результаты структурного анализа дают ключ к пониманию основных принципов решения задач кинематики и динамики механизмов. Так, например, степень подвижности и класс механизма заранее говорят о трудоемкости будущего решения. Формула строения механизма предопределяет последовательность кинематического анализа и силового расчета. 1
Для закрепления материала приведем примеры структурного анализа механизмов, изображенных на рис.2.8, а, б. Входное звено обоих механизмов – кривошип 1. Для каждого случая определена степень подвижности, выделены структурные группы, приведена формула строения механизма и определен его класс.
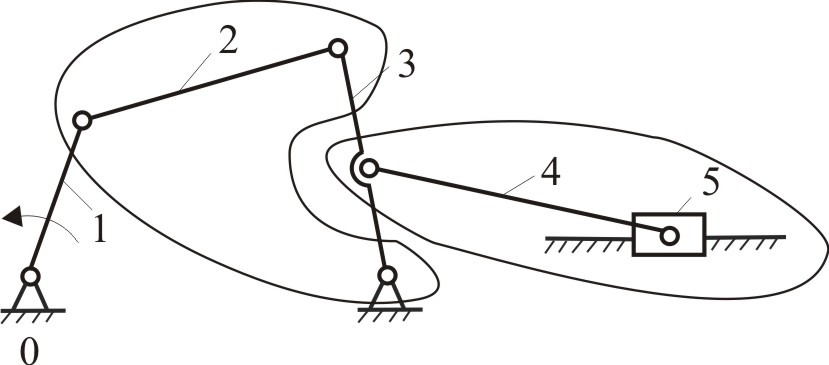 |  |
| а) W = 3 · 5 – 2 · 7 = 1 I (0,1) → II (2,3) → II (4,5) Класс механизма - II | б) W = 3 · 5 – 2 · 7 = 1 I (0,1) → II (2,3) → II (4,5) Класс механизма - II |
Рис.2.8
Задание для самостоятельного решения.
Используя теоретический материал лекции 2, выполнить структурный анализ механизмов, изображенных на рис.2.8, а, б , при условии, что:
-
входным звеном механизма (Рис.2.8, а) является ползун 5; -
входным звеном механизма (Рис.2.8, б) является звено 4.
Вопросы для самоконтроля
-
Объясните смысл задачи структурного анализа механизма. Что должно быть заданным, а что подлежит определению? -
Что такое структурная (принципиальная) схема механизма? Для решения какой задачи ее используют? В чем ее отличие от кинематической схемы? -
Какой параметр называется «обобщенной координатой»? Приведите пример. -
Степень подвижности каких механизмов определяют по формуле Чебышева? Напишите эту формулу и объясните смысл входящих в нее величин. -
Что называется структурной группой Л.В.Ассура? -
Какая структурная группа называется «диадой»? -
Как определяется класс и порядок структурных групп? Приведите примеры. -
Сформулируйте принцип образования рычажных механизмов. -
Что показывает формула строения механизма? -
Как определяют класс механизма? -
Изменяется ли степень подвижности и класс механизма в зависимости от выбора входного звена? -
Назовите пункты структурного анализа механизма.
Лекция 3
структурный и метрический синтез плоских рычажных механизмов
-
Плоские рычажные механизмы. Достоинства и недостатки низших и высших кинематических пар. ([1], §8, п.1; [2], §2.2 - 2.3) -
Задачи структурного и метрического синтеза. ([2], §2.5) -
Критерий существования кривошипа. ([2], §11.1) -
Критерий положений ведомого звена. ([2], §11.2) -
Критерий максимального угла давления. ([2], §11.1 – 11.2) -
Критерий отношения средних скоростей ведомого звена. ([2], §11.4) -
Метрический синтез сложного механизма. ([1], §26)
-
Плоские рычажные механизмы. Достоинства и недостатки низших и высших кинематических пар.

