ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 12.04.2024
Просмотров: 97
Скачиваний: 0

СОДЕРЖАНИЕ
2. Основные географические точки, линии и круги на земном шаре
3. Системы координат, применяемые в воздушной навигации
4. Масштаб карты. Виды масштабов, их определения.
5. Основные виды картографических проекций
6. Магнитное склонение. Причины возникновения
7. Девиация магнитного компаса. Порядок учета
8. Взаимозависимость курсов ик, мк, кк
9. Путевые углы и способы их определения
10. Назначение и устройство навигационной линейки
11. Классификация высот полета по уровню начала отсчета
12. Основные способы измерения высоты полета
13. Погрешности барометрических высотомеров и их учет
15. Погрешности измерения воздушной скорости и их учет
16. Классификация ориентиров и их главные отличительные признаки
17. Правила ведения визуальной ориентировки
18. Порядок ведения визуальной ориентировки
19. Общая характеристика и виды радиотехнических систем
20. Основные радионавигационные элементы (курсовые углы и пеленги)
21. Ветер и его характеристики
22. Элементы навигационного треугольника скоростей
27. Расчет направления и скорости ветра в полете
28. Время местное, поясное и всемирное скоординированное (utc)
29. Полет на радиостанцию пассивным и активным способами
30. Активный полет от радиостанции
31. Контроль пути по дальности по боковой радиостанции
32. Задачи свж, решаемые с помощью наземных радиопеленгаторов
33. Контроль пути по направлению по арп
34. Истинный пеленг и взаимозависимость пеленгов
35. Расчет элементов разворота
36. Схемы снижения вс и захода на посадку
37. Характеристика маневров снижения и захода на посадку
38. Основные элементы малого прямоугольного маршрута (штилевые данные)
39. Горизонтальное эшелонирование вс
40. Расчет элементов предпосадочной прямой
41. Расчет безопасной высоты круга
42. Расчет безопасной высоты аэродрома
43. Расчет нижнего (безопасного) эшелона
44. Действия экипажа в случае потери ориентировки
45. Предотвращение случаев попадания вс в зоны опасных для полета метеоявлений
46. Вертикальное эшелонирование вс
47. Структура службы аэронавигационной информации (ани)
48. Документы аэронавигационной информации
49. Структура и содержание сборника ани (россджеп)
Часть 1. «Общие положения (gen)» состоит из пяти разделов:
Часть 2. «Маршрут (enr)» состоит из семи разделов:
5)
Определить 
27. Расчет направления и скорости ветра в полете
Алгоритм для определения ветра в полете:
1)
Определить 
2) По ключу определить α. Знак α соответствует знаку УС;
3)
По ключу определить U;
4)
По формулам определить направление
ветра: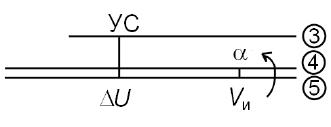

28. Время местное, поясное и всемирное скоординированное (utc)
В зависимости от того, какай меридиан принят за исходный, различают время местное, поясное, гринвичское, московское и др.
Гринвичским (всемирным) временем (Тгр) называется местное солнечное время на гринвичском меридиане. Гринвичский меридиан проходит через обсерваторию Гринвича (вблизи Лондона).
Всемирное координированное время (UTC) – атомное время, откорректированное в целях максимального его приближения к среднему солнечному времени гринвичского меридиана; используется в качестве общепризнанного международного стандарта часового времени.
Местное время (Тм) – время на данном географическом меридиане.
Поясное время (Тп) – солнечное местное время среднего меридиана часового пояса.
Декретное время (Тд) – поясное время, увеличенное на 1 ч. Декретное время было введено в 1930 г.
29. Полет на радиостанцию пассивным и активным способами
Активный способ:
Контроль
пути по направлению при полете на
радиостанцию выполняют путем сравнения
МПР с ЗМПУ и определения дополнительной
поправки в курс. Если МПР = ЗМПУ, то ВС
находится на ЛЗП, если МПР меньше ЗМПУ,
то ВС находится правее ЛЗП, если МПР
больше ЗМПУ, то ВС находится левее ЛЗП.




Пассивный полет на радиостанцию выполняется в следующем порядке:
1. Настроить радиокомпас на радиостанцию, прослушать позывной и убедиться в ее работе;
2. Доворотом ВС устанавить стрелку указателя на КУР = 0; пилотировать ВС так, чтобы стрелка указателя была на КУР = 0;

3. Определить момент пролета радиостанции по расчету времени и по изменению КУР на 180°.
30. Активный полет от радиостанции
Контроль
пути по направлению при полете от
радиостанции выполняется сравнением
МПС с ЗМПУ. В результате определяется
боковое уклонение ЛА от ЛЗП. Если МПС
= ЗМПУ или отличается не более чем
на 2°, то ЛА находится на ЛЗП, если МПС
больше ЗМПУ, то ЛА находится правее ЛЗП,
а если меньше – левее.





31. Контроль пути по дальности по боковой радиостанции
Контроль пути по дальности заключается в определении расстояния, пройденного от КО или оставшегося до заданного пункта. С помощью боковых радиостанций эту задачу решают следующими способами:
– пеленгованием боковой радиостанции и прокладкой ИПС на карте;
– выходом на предвычисленный КУР или МПР;
– выходом на траверз боковой радиостанции;
– расчетом расстояния по ЛЗП до траверза боковой радиостанции.
Контроль пути по дальности пеленгованием боковой радиостанции и прокладкой ИПС на карте производится в следующем порядке:
1. Настроить радиокомпас на выбранную боковую радиостанцию.
2. Определить ИПС и заметить время пеленгования.
3. Проложить полученный ИПС на бортовой карте от выбранной радиостанции. Линия пеленга укажет, какого рубежа достигло ВС в момент пеленгования радиостанции.
Контроль пути по дальности выходом на предвычисленный КУР или МПР – наиболее распространенный способ, который, в отличие от предыдущего, не требует прокладки пеленга на карте.
Предвычисленным называется заранее рассчитанный КУР (МПР) для определения момента пролета КО, ПОД, ППМ или любой заданной точки, лежащей на ЛЗП. Выход на предвычисленный КУР или МПР осуществляется в следующем порядке:
1. При подготовке к полету:
– наметить на ЛЗП точки контроля и выбрать боковые радиостанции;
–
для каждой намеченной точки измерить
ИПР на выбранную радио-станцию и
определить предвычисленный МПР по
формуле:
– записать на карте у точек контроля рассчитанные значения МПРпредв.
2. В
полете: 
– рассчитать предвычисленный КУР по формуле:
– за 3–5 мин до расчетного времени пролета точки контроля настроить радиокомпас на выбранную радиостанцию и следить за показаниями стрелки указателя радиокомпаса.
3. В
момент, когда стрелка покажет или
ВС будет находиться над точкой контроля.

Контроль пути по направлению и дальности на траверзе боковой радиостанции осуществляется путем определения момента выхода ВС на линию траверза боковой радиостанции в следующем порядке:
1. При подготовке к полету:
– выбрать для контроля пути боковые радиостанции;
– нанести перпендикулярные отметки на ЛЗП;
– измерить и записать на карте расстояние Sтр по перпендикуляру от радиостанции до ЛЗП;
2. В полете:
– настроить радиокомпас на боковую радиостанцию, на КУР = 45° (315°) + (±УС) включить, а на КУРтр = 90° (270°) + (+ УС) остановить секундомер;
–
по путевой скорости и времени, отсчитанному
по секундомеру, определить пройденное
расстояние: 
Если Sпр = Sтр, то ВС находится на ЛЗП. При Sпр ≠ Sтр ВС уклонился от ЛЗП;
– найти ЛБУ по формулам:
ЛБУ = Sтр – Sпр (радиостанция справа);
ЛБУ = Sпр – Sтр (радиостанция слева).
32. Задачи свж, решаемые с помощью наземных радиопеленгаторов
Наземный радиопеленгатор – специальное приемное радиотехническое устройство, позволяющее определять направление на самолет, на котором работает передающая радиостанция.
В комплексе с геотехническими средствами наземные радиопеленгаторы позволяют решать следующие задачи самолетовождения:
– выполнение полета от радиопеленгатора и на радиопеленгатор в заданном направлении;
– определение момента пролета радиопеленгатора или его траверза;
– контроль пути по дальности и направлению;
– определение МС и навигационных элементов полета;
– пробивание облачности и заход на посадку.
33. Контроль пути по направлению по арп
При полете от АРП:
При использовании УКВ радиопеленгаторов для контроля пути по направлению запрашивается в телефонном режиме пеленг от радиопеленгатора на самолет (прямой пеленг) словами «Дайте прямой пеленг», что означает: «Сообщите магнитный пеленг от вас».
Прямым пеленгом называется угол, заключенный между северным направлением магнитного меридиана, проходящего через радиопеленгатор, и направлением на самолет. ПП измеряется по ходу часовой стрелки от 0 до 360°.
Контроль пути по направлению при полете от радиопеленгатора осуществляется сравнением прямого пеленга с ЗМПУ. В результате этого сравнения определяется боковое уклонение самолета от ЛЗП. Если полученный ПП = ЗМПУ или отличается от него на 1–2°, то самолет находится на ЛЗП, если ПП > ЗМПУ, то самолет находится правее ЛЗП, если ПП < ЗМПУ, то самолет находится левее ЛЗП.
При полете на АРП:
При использовании УКВ радиопеленгаторов для контроля пути по направлению запрашивается в телефонном режиме обратный пеленг словами «Дайте обратный пеленг», что означает: «Сообщите магнитный курс, с которым я должен направиться к вам при отсутствии ветра».
Обратным пеленгом называется угол, заключенный между северным направлением магнитного меридиана, проходящего через радиопеленгатор, и направлением продолжения линии, проложенной от ВС через радиопеленгатор. ОП измеряется по ходу часовой стрелки от 0 до 360°. Обратный пеленг – это измененный на 180° прямой пеленг.
Контроль пути по направлению при полете на радиопеленгатор осуществляется путем запроса обратного пеленга, сравнения его с ЗМПУ и определения дополнительной поправки. Если ОП = ЗМПУ, то самолет находится на ЛЗП, если ОП < ЗМПУ, то самолет находится правее ЛЗП, если ОП > ЗМПУ, то самолет находится левее ЛЗП.