Файл: Лекции по теории механизмов и машин. Учебное пособие к изучению теоретических основ курса для студентов направлений 050502 Инженерная механика.doc
ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 04.05.2024
Просмотров: 100
Скачиваний: 0
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.

Рис.3.8
Н
 а рис.3.9 изображен ползун, входящий в кинематические пары с шатуном и стойкой. Сила
а рис.3.9 изображен ползун, входящий в кинематические пары с шатуном и стойкой. Сила Действительно, из условия равновесия сил в направлении нормали к направляющей получаем нормальную реакцию стойки
Следует иметь ввиду, что угол давления
Угол давления
Таким образом, оптимальным вариантом метрического синтеза является тот, когда угол давления в наиболее неблагоприятных положениях механизма достигает максимально допустимого значения, но не превышает его. При создании новых механизмов максимальный угол давления в паре шатун-ползун рекомендуется принимать равным
max = 3040.
Покажем на примере, как определяется длина звена по критерию «угол давления».
Пример.
Н
 а рис.3.10 изображен кривошипно-ползунный механизм с направляющей, смещенной относительно центра вращения кривошипа на величину эксцентриситета - е*. Заданы длина кривошипа ОА и максимальный угол давления в паре шатун-ползун - max.
а рис.3.10 изображен кривошипно-ползунный механизм с направляющей, смещенной относительно центра вращения кривошипа на величину эксцентриситета - е*. Заданы длина кривошипа ОА и максимальный угол давления в паре шатун-ползун - max.Дано: ОА= r, max, е*.
Определить: длину шатуна , из условия, что при полном обороте кривошипа угол давления не превысит max.
Решение.
Рассмотрим изменение угла давления в паре шатун-ползун при прямом и обратном движении ползуна. На рисунке сделаны обозначения:
Из геометрии следует:
Анализируя (3.12) и (3.13) , находим положения механизма, при которых значения углов давления максимальны:
Значит:
Учитывая, что
Поэтому окончательно:
-
Критерий отношения средних скоростей ведомого звена
Иногда при проектировании механизмов бывает важно, чтобы выходное звено на рабочем и на холостом ходу двигалось с различными средними скоростями.1 В этом случае метрический синтез механизма выполняется с учетом коэффициента отношения средних скоростей.

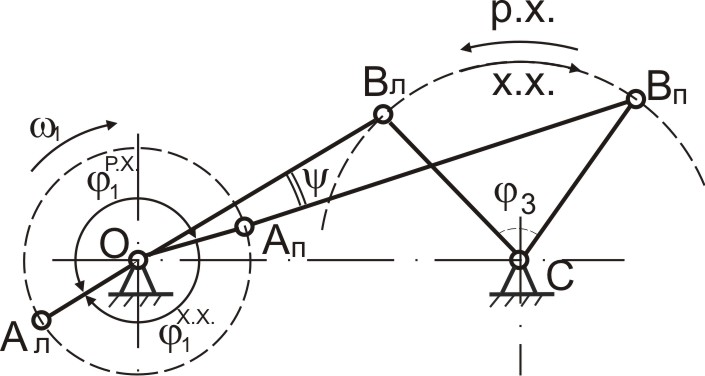 Рассмотрим работу кривошипно-коромыслового механизма (рис. 3.11).
Рассмотрим работу кривошипно-коромыслового механизма (рис. 3.11). Стрелками на рисунке обозначены:
р.х.– рабочий ход ведомого звена (совершается полезная работа);
х.х. – холостой ход (полезная работа не совершается).
Предположим, что ведущее звено ОА вращается равномерно (1=const).
Рис.3.11
Из рис. 3.11 видно, что
Коэффициент отношения средних скоростей ведомого звена:
Для ведущего звена
Отсюда
Имея требуемое значение
-
Метрический синтез сложного механизма
Сложным механизмом условно будем называть механизм, в состав которого входят несколько структурных групп.
Пример такого механизма показан на рис.3.12. Структурно он состоит из первичного механизма и двух последовательно присоединенных к нему структурных групп.
 Как и в случае простых механизмов, метрический синтез сложного механизма осуществляется с использованием рассмотренных выше или иных критериев. При этом вначале сложный механизм разбивается на более простые механизмы в соответствии с формулой строения. В нашем случае это механизмы ОАВС и СВД.
Как и в случае простых механизмов, метрический синтез сложного механизма осуществляется с использованием рассмотренных выше или иных критериев. При этом вначале сложный механизм разбивается на более простые механизмы в соответствии с формулой строения. В нашем случае это механизмы ОАВС и СВД. Метрический синтез сложного механизма выполняют в последовательности:
-
синтез первого простого механизма; -
синтез второго простого механизма; -
и т.д.
Для закрепления изложенного материала
, рассмотрим последовательность операций по метрическому синтезу механизма качающегося конвейера из курсового проекта по ТММ. Предположим, что принципиальная схема механизма задана и изображена на рис.3.13.
Решение:

-
Выделяем простые механизмы: ОАВС и СДЕ. -
Используем критерий положений коромысла СВ.
Дано:
-
Используем критерий положений ползуна Е.
Дано:
-
Критерий максимального угла давления в кинематической паре Е - .
.
Дано:
-
Критерий отношения средних скоростей выходного звена
Дано: крайние положения механизма, угол
направление вращения ведущего звена.
Вопросы для самоконтроля
-
Какие механизмы в ТММ называют плоскими? -
Нарисуйте несколько принципиальных схем плоских механизмов. Покажите низшие и высшие кинематические пары, использованные в них. -
Укажите достоинства и недостатки низших и высших кинематических пар. -
Объясните смысл задачи структурного синтеза механизма. Что при этом задается, а что подлежит определению? -
Объясните смысл задачи метрического синтеза механизма. Что при этом задается, а что подлежит определению?
Лекция 4
кинематический анализ плоских рычажных механизмов (графический метод)
-
Основная задача и цели кинематического анализа. Методы решения. ([1], §14, п.1; §15, п.1; [2], §3.2; [3], Глава 2, §4) -
Определение положений механизма. ([1], §17; [2], §3.2; [3], Глава 2, §4) -
Определение скоростей точек и угловых скоростей звеньев механизма. ([1], §18; [2], §3.2; [3], Глава 2, §4) -
Определение ускорений точек и угловых ускорений звеньев механизма. ([1], §18; [2], §3.2; [3], Глава 2, §4) -
Кинематический анализ сложных механизмов ([3], Глава 2, §4).
-
Основная задача и цели кинематического анализа. Методы решения.
Основная задача кинематики механизмов – изучение движения точек и звеньев механизма без учета сил, действующих на этот механизм.
Кинематическое исследование механизма преследует три основных цели:
-
Изучение положений механизма. Изучение перемещений точек и углов поворота звеньев ( ). Определение траекторий движения точек.
). Определение траекторий движения точек.
-
Результаты исследований по данному пункту используются при определении габаритных размеров механизма, определении формы и размеров внутрикорпусного пространства, определения скоростей, ускорений, решении задач динамического синтеза и анализа.
-
Определение скоростей точек и угловых скоростей звеньев ( ).
).
-
Найденные линейные скорости могут быть использованы, в том числе, для определения мощностей сил и приведенной силы; угловые скорости – для определения нормальных ускорений точек, мощностей моментов сил и др. целей.
-
Определение ускорений точек и угловых ускорений звеньев ( ).
).
-
Ускорения в задачах динамики позволяют выполнить силовой расчет механизма, т.е. расчет движущей силы и нагруженности кинетических пар по методу кинетостатики (с использованием принципа Даламбера). В кулачковых механизмах по ускорениям судят о динамических нагрузках, возникающих в процессе работы механизма.
Методы кинематического анализа.
-
Графический (преимущества - наглядность, прогнозируемость результатов; недостатки - низкая точность, трудоемкость). -
Аналитический (высокая точность, но отсутствие наглядности, необходимость дополнительной работы по составлению и отладке программы).