Файл: Лекции по теории механизмов и машин. Учебное пособие к изучению теоретических основ курса для студентов направлений 050502 Инженерная механика.doc
ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 04.05.2024
Просмотров: 72
Скачиваний: 0
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.

-
Определим значения абсолютных и относительных ускорений точек
-
Определим угловые ускорения звеньев
Направления
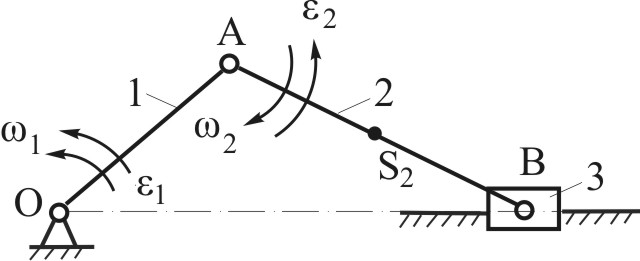
Пример 2. – кривошипно-ползунный механизм (Рис.4.11)
 |  |
| Рис. 4.11 | Рис. 4.12 |
Алгоритм построений (Рис.4.12)
-
 ;
; -
 ;
;  = … ;
= … ; -
 ;
;  ;
; -
 ,
,  .
.
-
Кинематический анализ сложных механизмов
Кинематический анализ сложных механизмов выполняется в последовательности, определяемой формулой строения механизма, т.е.:
-
Анализ механизма I класса. -
Анализ группы Ассура, следующей за механизмом I класса. -
Анализ последующих групп Ассура.
В качестве примера рассмотрим механизм, изображенный на рис.4.13.
Формула строения этого механизма: I(0,1) II(2,3) II(4,5)
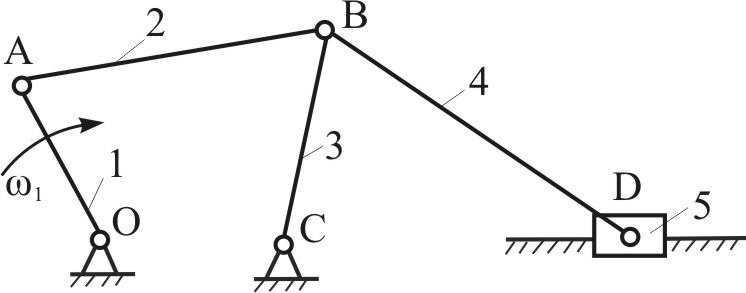 Рис. 4.13 | Решение.
|
-
Определение кинематических характеристик точек и звеньев группы Ассура II(2,3) – положение, .
. -
Определение кинематических характеристик точек и звеньев группы Ассура II(4,5) – положение, .
.
Таким образом, задача по определению кинематических характеристик для механизма (рис.4.13) сводится к последовательному решению задач для кривошипно-коромыслового, а затем коромыслово-ползунного механизмов (которые рассмотрены ранее в примерах).
З
 адание для самостоятельной работы и самоконтроля усвоения материала:
адание для самостоятельной работы и самоконтроля усвоения материала:Дано: На рис.4.14 показана кинематическая схема эллипсографа - прибора для построения правильных эллипсов. Геометрические размеры таковы, что
Требуется: Доказать, что точки, принадлежащие шатуну эллипсографа двигаются по эллиптическим траекториям. Задачу решить графическим методом. Результаты сравнить с данными аналитического решения.
Аналитическое решение
-
W = 3n-2p5-p4= 33–24 = 1
(1 зв. + 2 к/пары – “лишние”, т.к. не влияют на
движение механизма)
-
Определим координаты произвольной точки М (Рис.4.15), а затем, исключив параметр , найдем уравнение траектории движения этой точки:
, найдем уравнение траектории движения этой точки:
(r + BM) = A1 = const
(r - BM) = A2 = const
Уравнение (4.15) – уравнение эллипса.
Замечание. В лекции не рассмотрено построение плана ускорений для кулисного механизма. Желающим разобраться в этом вопросе рекомендуем обратиться к учебнику [3], Глава 2, §4.
Вопросы для самоконтроля
-
Назовите задачу и цели кинематического исследования механизмов. -
Каким основным признаком руководствуются при построении крайних положений четырехзвенных кривошипно-коромыслового или кривошипно-ползунного механизмов? -
Какое положение занимает кривошип по отношению к кулисе в крайних положениях кривошипно-кулисного механизма? -
Объясните общий порядок построения планов скоростей и ускорений для рычажных механизмов II класса. -
Масштабные коэффициенты планов скоростей и ускорений. Какова их размерность? Как вычисляются значения масштабных коэффициентов? -
Нарисуйте звено АВ длиной . Покажите на рисунке заданные параметры
. Покажите на рисунке заданные параметры  ., указав их направления произвольно. Напишите векторные формулы для определения скорости и ускорения точки В. Определите
., указав их направления произвольно. Напишите векторные формулы для определения скорости и ускорения точки В. Определите  и
и  . путем схематических графических построений.
. путем схематических графических построений. -
Изучив разделы 4.3 и 4.4 лекции 4, постройте схематический план скоростей (показать только направления векторов) и схематический план ускорений для механизма, изображенного на рис.4.13.
Лекция 5
кинематический анализ плоских рычажных механизмов (аналитический метод)
-
Определение положений механизма. ([1], §23, 24, 25; [2], §3.3) -
Определение скоростей точек и угловых скоростей звеньев механизма. ([1], §23, 24, 25; [2], §3.3) -
Определение ускорений точек и угловых ускорений звеньев механизма. ([1], §23, 24, 25; [2], §3.3) -
Кинематический анализ сложных механизмов. ([1], §26; [2], §3.3)
Кинематический анализ механизмов аналитическим методом выполняется с помощью ПК или другой вычислительной техники. Для этого составляется соответствующая программа вычислений, в которую входят формулы для определения положений звеньев и их кинематических характеристик. Если механизм имеет степень подвижности, равную 1, то все кинематические параметры должны определяться исходя из одной величины – обобщенной координаты (для механизмов с ведущим кривошипом, исходя из положения кривошипа).
В основу аналитического решения задачи положен метод замкнутых векторных контуров, предложенный В.А.Зиновьевым.1
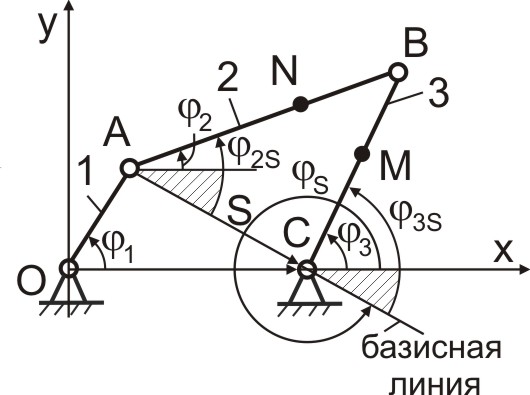
Покажем получение основных формул кинематического анализа на примере шарнирного четырехзвенника (Рис.5.1).
-
Определение положений механизма.
Д
 ано:
ано: ОА, АВ, ВС, ОС (Рис.5.1);
1 – положение начального звена 1;
1 – угловая скорость звена 1;
1 –угловое ускорение звена 1.
Определить:
2(1), 3(1) - ?
Рис. 5.1.
Решение
-
Выберем систему координат хоу с началом в точке О (Рис.5.1).
Рассмотрим векторный контур ОАС, в котором
Принимая
Для этого спроецируем (5.1) на оси х и у:
пр.х
(5.2)
пр.y
При этом
Выполним преобразования, разделив (5.3) на (5.2):
(5.3) : (5.2)
т.е. получили зависимость
Продолжим преобразования с выражениями (5.3) и (5.2):
т.е. получили зависимость
-
Рассмотрим векторный контур и определим
и определим  и
и  .
.
В (5.6) и (5.7) известно все, кроме 2S и 3S, которые легко определить.
т.е. получена зависимость
т.е. получена зависимость
-
Определим и
и  .
.
Отсюда :

