ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 25.03.2024
Просмотров: 44
Скачиваний: 0

СОДЕРЖАНИЕ
2) Оптимизация решений в условиях неопределенности
2) Методы принятия оптимальных решений. Оценка операции по нескольким показателям.
3) Оценка операции по нескольким показателям.
4) Геометрическая интерпретация озлп.
Анализ положения l относительно одр.
Дадим геометрическую интерпретацию поиска оптимального решения.
Тогда (x1*, x2*, …, xn*) – оптимальное решение
5) Задача лп с ограничениями-неравенствами. Переход от нее к основной задаче.
6) Симплекс-метод решения задачи лп.
7) Табличный алгоритм замены переменных.
8. Отыскание опорного решения задачи лп на основе табличного алгоритма замены переменных.
9. Отыскание оптимального решения задачи лп на основе табличного алгоритма замены переменных.
12. Управление переходом организма из исходного состояния в конечное в условиях неопределенности.
13. Игровые методы обоснования решений. Основные понятия теории игр. Платежная матрица.
14. Нижняя и верхняя цена игры. Принцип минимакса. Решение игры в чистых стратегиях.
15. Решение игры в смешанных стратегиях.
(По поводу ориентированного графа, вот его определение из интернета: Ориентированный граф (кратко орграф) — (мульти) граф, рёбрам которого присвоено направление. Направленные рёбра именуются также дугами, а в некоторых источниках и просто рёбрами.
Примеры их чудесной рисовки есть в примерах, лучше если будете рисовать, взять этот, так как он прям подписан как ориент.граф)
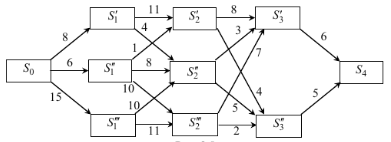
(Будьте осторожны, на картинке есть ошибка где переход от S0 к S’1, там 3 а не 8)
Далее идут два примера:
Пример 2.1. на странице 39 в печатной методе и 40 в электронной
Вот выписка из неё приведенная в конце
В рассмотренной задаче промежуточные состояния организма описывались с помощью прямоугольной сетки. В общем случае это не обязательно. Множество состояний и возможные переходы из состояния в состояние можно задать и в виде ориентированного графа. В этом случае задачи управляемого перевода организма из одного состояния в другое можно представить, как поиск кратчайшего пути на ориентированной ациклической (т. е. без петель и контуров) сети. Решаются такие задачи точно так же, как и на прямоугольной сетке. Заметим, что использованная нами для решения прямоугольная сетка также является ориентированной ациклической сетью, если на ее отрезках проставить стрелки всех возможных управлений. Ниже приведена задача, описываемая в виде сети.
Пример 2.2. на странице 42 в печатной методе и 43 в электронной
12. Управление переходом организма из исходного состояния в конечное в условиях неопределенности.
До сих пор мы рассматривали детерминированную модель (аналитическое представление закономерности, операции и т.п., при которых для данной совокупности входных значений на выходе системы может быть получен единственный результат.) динамического программирования. В реальной жизни как на состояние системы, так и на целевую функцию влияют случайные факторы, и поведение системы зависит не только от начального состояния S0 и выбранного управления x, но и от случайности.
Рассмотрим стохастическую (т.е. случайную) модель задачи о кратчайшем пути на ациклической сети. Допустим существование в системе условных вероятностей P (Si / Si−1 , xi ) того, что на i-м шаге управления система перейдет в состояние Si при условии, что до этого она находилась в Si−1 и было применено управление xi . Это условие представляет собой допущение о марковском свойстве системы, согласно которому вероятность перехода системы в какое-либо состояние Si зависит только от состояния Si−1 , из которого совершается переход, и от применяемого управления xi , но никак не зависит от предыстории системы, предшествующей ее переходу в Si−1.
Таким
образом, теперь управляющее воздействие
xi
на 1-м шаге управления может лишь изменить
вероятности перехода из данного состояния
Si−1
в
другие состояния Si
. Теперь, находясь в каком-либо состоянии
и применяя некоторое управление, можно
говорить только
о средних затратах
 времени достижения
конечного состояния, которые вычисляются
как взвешенные по соответствующим
вероятностям затраты, рассмотренные
по всем возможным из данного состояния
траекториям.
В этом случае, очевидно, задача заключается
в нахождении такого множества оптимальных
управлений (по одному для каждого
состояния), которое дает минимальное
среднее значение времени перехода из
S0
в Sm
.
времени достижения
конечного состояния, которые вычисляются
как взвешенные по соответствующим
вероятностям затраты, рассмотренные
по всем возможным из данного состояния
траекториям.
В этом случае, очевидно, задача заключается
в нахождении такого множества оптимальных
управлений (по одному для каждого
состояния), которое дает минимальное
среднее значение времени перехода из
S0
в Sm
.
Применение
принципа оптимальности к таким задачам
приводит к стохастической модели
динамического программирования. Пусть
 обозначает конкретное состояние системы,
в которое она переходит на i-м
шаге,
обозначает конкретное состояние системы,
в которое она переходит на i-м
шаге,
 – временные затраты на перевод организма
в состояние
– временные затраты на перевод организма
в состояние
 на i-м
шаге из состояния
на i-м
шаге из состояния
 .
.

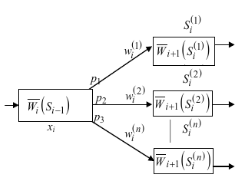
Рис. 4
Допустим,
что для части сети (рис. 4) известны
условные минимальные средние временные
затраты
 i+1
(Si
) на достижение конечного состояния из
Si (Si ∈{
i+1
(Si
) на достижение конечного состояния из
Si (Si ∈{ ,
,
 }).
На рис. 4 через p1,
p2,
…, pn
обозначены условные вероятности перехода
}).
На рис. 4 через p1,
p2,
…, pn
обозначены условные вероятности перехода
pj
= P
( | Si−1,
xi
), причем
| Si−1,
xi
), причем

Если,
например, находясь в состоянии Si−1
,
мы применяем управление xi
,
то средние затраты времени
 i
(Si−1
| xi ) на достижение конечного состояния
из Si−1
равны
i
(Si−1
| xi ) на достижение конечного состояния
из Si−1
равны

Так
как вариантов управления на i-м шаге
может быть несколько, т. е. xi может
принимать разные значения xi ∈{ ,
,
 },
выберем то из них, при котором
},
выберем то из них, при котором
 i
(Si−1|xi)
становится минимальным. При этом
стохастическое обобщение основного
рекуррентного уравнения (см.
в предыдущем вопросе его)
имеет вид
i
(Si−1|xi)
становится минимальным. При этом
стохастическое обобщение основного
рекуррентного уравнения (см.
в предыдущем вопросе его)
имеет вид

или в развернутой форме

Поскольку применяются условные вероятности, то
Далее следуют примеры:
Пример 2.3. на странице 48 в печатной методе и 49 в электронной
Пример 2.4. на странице 51 в печатной методе и 52 в электронной
13. Игровые методы обоснования решений. Основные понятия теории игр. Платежная матрица.
Рассмотрим игру (модель конфликтной ситуации), в которой участвуют два игрока A и B, имеющие прямо противоположные интересы, поэтому выигрыш одного равен проигрышу другого. Такая игра называется парной игрой с нулевой суммой. Если игрок A выигрывает a, то игрок B при этом выигрывает −a, поэтому сумма выигрышей всегда равна нулю. Процесс игры заключается в последовательных ходах (личных – сознательных и случайных) противников, а совокупность правил, определяющих выбор варианта действий при каждом личном ходе в зависимости от сложившейся ситуации называется стратегией игрока. При конечном числе стратегий игра будет конечной. Пусть у игрока A имеется m возможных стратегий A1, A2, …, Am, а у игрока B – n возможных стратегий B1, B2, …, Bn. Пусть также известны величины aij – выигрыши игрока A при использовании Ai с его стороны и Bj со стороны противника. Тогда игра, называемая игрой m×n, может быть представлена таблицей, называемой платежной матрицей Bj или просто матрицей игры (табл. 1).
Таблица 1
|
|
Bj |
|||
|
Ai |
B1 |
B2 |
… |
Bn |
|
A1 |
|
|
… |
|
|
A2 |
|
|
… |
|
|
… |
… |
… |
… |
… |
|
Am |
|
|
… |
|









Приведение игры к матричной форме может само по себе составить трудную задачу, однако таким путем многоходовая игра фактически сводится к одноходовой – от игрока требуется сделать только один ход: выбрать подходящую стратегию. Для данного игрока среди всех стратегий имеется оптимальная, обеспечивающая ему максимальный выигрыш. Задача теории игр – нахождение оптимальных стратегий игроков в предположении одинаковой «разумности» противников.
14. Нижняя и верхняя цена игры. Принцип минимакса. Решение игры в чистых стратегиях.
По
платежной матрице (см. предыдущий вопрос)
игры определяется нижняя α и верхняя β
цены игры. Допустим, что
 (выбираем
минимальное число в строке, записываем
их рядом и у нас получается столбец из
минимальных значений),
(выбираем
минимальное число в строке, записываем
их рядом и у нас получается столбец из
минимальных значений),
 (выбираем
максимальное число в столбце – строка
из максимальных),
тогда
(выбираем
максимальное число в столбце – строка
из максимальных),
тогда
 (из
выписанных сбоку в столбец минимальных
значений ищем максимальное)
(из
выписанных сбоку в столбец минимальных
значений ищем максимальное)
 (из
выписанных снизу в строку максимальных
значений ищем минимальное)
(из
выписанных снизу в строку максимальных
значений ищем минимальное)
Принцип выбора противниками стратегий, соответствующих получению ими выигрышей α и β называется принципом минимакса, а сами стратегии – минимаксными. Минимаксные стратегии устойчивы по отношению к информации о поведении другой стороны только в случае, если α=β. Тогда у матрицы есть седловая точка (это месторасположение совпавшего числа (чистой стратегии) в матрице аля (2,3) – то есть вторая строка третий столбец). а величина ????=α=β называется ценой игры. Стратегии Ai и Bj, при которых достигается выигрыш ????, называются оптимальными чистыми стратегиями, а их совокупность – решением игры.
Возможно, еще подойдет первая часть решения задачи из пункта 3.2 (она будет в самом конце).