ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 11.04.2024
Просмотров: 337
Скачиваний: 1
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.

СОДЕРЖАНИЕ
ОБЩИЕ ПОЛОЖЕНИЯ ТЕОРИИ ШАХТНЫХ ПОДЪЕМНЫХ УСТАНОВОК
ОСНОВНЫЕ ПАРАМЕТРЫ ШАХТНОЙ ПОДЪЕМНОЙ УСТАНОВКИ
Определение грузоподъемности подъемного сосуда
Продолжительность цикла и чистое время подъема
Подъемные канаты для вертикального подъема
Уравновешивающие (хвостовые) канаты
Статические сопротивления при вертикальном подъеме
Статические сопротивления при спуске груза
СИСТЕМА ПОДЪЕМА С ПРОТИВОВЕСnl
Статические сопротивления при вертикальном подъеме
Статическое сопротивление – это разность статических на- тяжений грузовой и порожней ветвей канатов на окружности органа навивки:
Fст = Fст Fст. (18)
Принято рассматривать изменения статических сопротивле- ний в функциях пройденного подъемными сосудами пути xили вре- мени t. Наиболее простой вид эти зависимости имеют для неопро- кидных клетей.
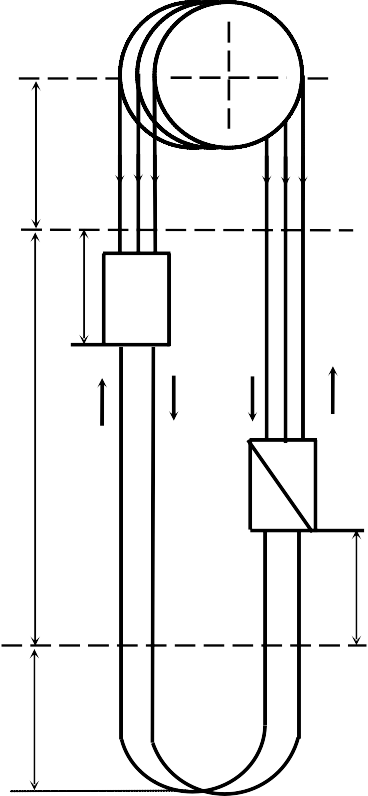
Для обобщения вывода уравнения статических сопротивле- ний в функции xрассмотрим случай многоканатной системы ТХК при подъеме груза. В соответствии с расчетной схемой (рис.10) для произвольного положения сосудов составим выражения статических натяжений обеих ветвей канатов, при этом обозначим сопротивления движению ветвей соответственно wи w. Вычтем из первого вы- ражения второе. Тогда
31
Fст = g[Q+Q+np(h+H– x) +
+ nxpx(hx + x)] + w–
Fст=
h'
Fс″т
ВПП
x
Q′
H
w″ w′
Fс′т
n; p
Q+Q′
= g[Q+np(h+ x) +
+ nxpx(H+hx – x)] – w;
Fст = g[Q+ np(H– 2x) – nxpx(H– 2x)] +
+ w+ w.
После преобразований и под- становки суммарного сопротивления обеих ветвей w=w+wполучим
Fст =
= g[Q–(nxpx – np)(H– 2x)] + w. (19)
Обозначим сумму
hх
x
nх; pх
gQ+ w= gQ(1 +
w ) = gkQ, gQ

Рис.10. Расчетная схема для определения статических
сопротивлений при двухсосудном подъеме
где k– коэффициент, учитываю- щий шахтные сопротивления, для скипов и клетей kсоответственно равно 1,15 и 1,20.
Окончательное выражение для подъема груза при любой сте- пени уравновешенности системы следующее:
Fст = g[kQ–(nxpx – np)(H–2x)]. (20)
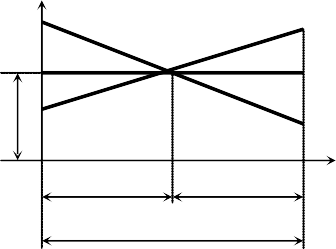
Статические сопротивления при системе ТХК в функции пу- ти имеют вид восходящей прямой (рис.11).
При равновесных хвостовых канатах в уравнении (18) следу- ет полагать nxpx = np, поэтому
Fст = kgQ. (21)
Статические сопротивления при этом остаются постоянными и не зависят от положения клетей в стволе (см. рис.10).
32
При подъеме без хвосто- вых канатов nxpx = 0, поэтому
Fст = g[kQ+ np(H– 2x)]. (22)
Изменение статических сопротивлений при системе БХК происходит по нисходящей пря- мой (рис.11).
kgQ
 Fст
Fст 0
ТХК
БХК
Н/2 Н/2
Н
РХК
x
При встрече подъемных сосудов в стволе, когда x= Н/2, для всех степеней уравновешен-
Рис.11. Диаграммы статических сопротивлений при неопрокидных клетях
ности
F = kgQ, что соот-
cт |
x H/2
ветствует точке пересечения всех графиков.
Сравнение графиков (рис.11) позволяет сделать следующие выводы:
-
При системе ТХК пусковое сопротивление в начале подъ- ема минимальное, в конце – максимальное, что в целом обеспечива- ет наивыгоднейшие энергетические показатели и более высокую степень безопасности в конце подъема, так как необходимое тор- мозное усилие при этом снижается. -
При отсутствии хвостовых канатов (БХК-система) пуско- вое сопротивление максимальное, а в конце подъема – минимальное, что требует, как правило, увеличения мощности двигателя. Необхо- димость применения больших тормозных усилий в конце подъема уменьшает безопасность и экономичность управления. -
Применение системы РХК обеспечивает постоянство ста- тических сопротивлений на протяжении всего цикла, что упрощает управление как в ручном, так и в автоматическом режимах. При проектировании подъемных установок обычно ориентируются на системы с равновесными хвостовыми канатами.
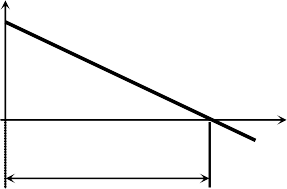
Предельная высота подъема при неуравновешенной системе БХК определяется положением, при котором статические сопротив- ления переходят в область отрицательных значений. Отрицательные статические сопротивления играют роль движущих усилий, что не- приемлемо по соображениям безопасности, экономичности и на- дежности управления подъемной машиной.
33
Fст
0
 Нпредx
НпредxПредельная высота, при которой статические сопротивле- ния переходят через нулевое зна- чение, определяется из выражения (22), где Fст = 0, что соответствует Н=Нпред и x= Нпред (рис.12), тогда
Рис.12. Диаграмма статических сопротивлений для определения предельной высоты подъема
при статически неуравновешенной системе
Нпред = kQ/ np.
Значение Нпред составляет обычно около 550 м. При боль- шей глубине стволов следует прибегать к статическому уравно- вешиванию за счет применения
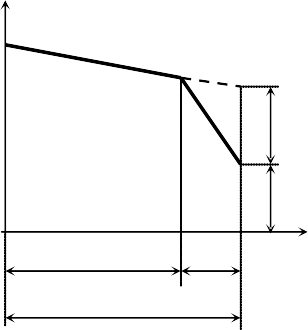 Fст А
Fст АB C
0,4gQ
D
Fст к
уравновешивающих канатов либо переменного радиуса навивки. Более подробно этот вопрос рас- смотрен в работе [5].
При скипах с донной раз- грузкой Fст с начала подъема до момента входа ролика затвора