ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 11.04.2024
Просмотров: 323
Скачиваний: 1
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.

СОДЕРЖАНИЕ
ОБЩИЕ ПОЛОЖЕНИЯ ТЕОРИИ ШАХТНЫХ ПОДЪЕМНЫХ УСТАНОВОК
ОСНОВНЫЕ ПАРАМЕТРЫ ШАХТНОЙ ПОДЪЕМНОЙ УСТАНОВКИ
Определение грузоподъемности подъемного сосуда
Продолжительность цикла и чистое время подъема
Подъемные канаты для вертикального подъема
Уравновешивающие (хвостовые) канаты
Статические сопротивления при вертикальном подъеме
Статические сопротивления при спуске груза
СИСТЕМА ПОДЪЕМА С ПРОТИВОВЕСnl
Конструкции тормозных устройств
Существуют два конструктивных типа тормозных устройств: радиальные и дисковые. Наиболее современными являются диско- вые устройства, у которых тормозные колодки воздействуют на диск, прикрепленный непосредственно к органу навивки.
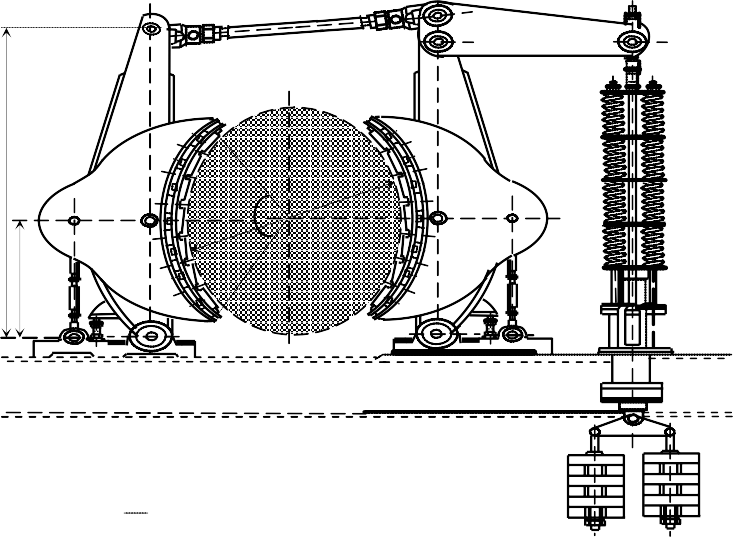
Тормозные устройства радиального типа серийно изготавли- ваемых машин рассмотрены в работах [4, 14]. На рис.26 изображен исполнительный орган тормоза радиального типа с пружинно- пневматическим приводом. Методы расчетов тормозных устройств и вопросы совершенствования их работ рассмотрены в работе [14].
Дисковые тормозные устройства с общим приводом и мно- гоэлементные устройства описаны в работе [14]. Вне зависимости от кинематической схемы дисковые тормоза имеют следующие пре- имущества перед радиальными:
-
силы прижатия тормозных колодок к диску взаимно уравно- вешиваются и не нагружают орган навивки радиальными усилиями; -
при равных тормозных моментах дисковый тормоз легче и компактнее, меньше его инерционность, выше быстродействие, больше точность управления;
 l Dтш
l Dтш
l0
Рис.26. Исполнительный орган тормоза
73
3 4 плоская поверхность
 1 2 2 1
1 2 2 15
1 –поршень;2–тормозныеколодки; 3–диск;4 –тарельчатые пружины; 5– трубопровод
ще, а его ремонт легко выполним.
тормозной колодки менее подвержена тепловой дефор- мации, тормозное поле имеет благоприятные условия для охлаждения в результате как конвекции, так и излучения;
-
тепловое расширение диска практически не влияет на эффект торможения; -
изготовление плоско- го диска технологически про-
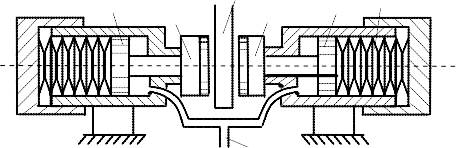
Наиболее полно эти преимущества проявляются у многоэле- ментных дисковых тормозных устройств, исполнительный орган и привод которых обычно представляются общим узлом (рис.27).
- Расчет параметров тормозных приводов [13]
По требуемому тормозному моменту необходимо найти рас- четное усилие Qт в тормозной тяге или расчетную массу тормозного груза Gт. Эти величины определяются в соответствии с выражениями
Qт = Мт / ifRт; Gт = Мт / gifRт,
где – число тормозных приводов; Rт – радиус тормозного обода, м; f– коэффициент трения тормозных колодок об обод, принимается для отечественной пресс-массы равным 0,3; – КПД рычажной сис- темы тормоза, КПД = 0,95; i–передаточное число рычажного меха- низма тормоза.
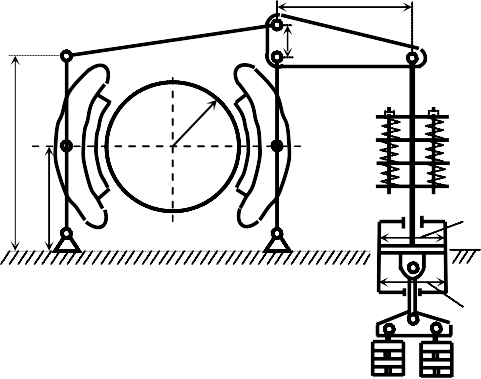
Передаточное число рычажного механизма для пружинного (безгрузового) и пружинно-грузового приводов (рис.28) рассчиты- вается, исходя из размеров по чертежам завода-изготовителя, по формуле
i= 2cl/ dl0.
74

 Для многоканат- а c
Для многоканат- а cных подъемных машин d
тормозные устройства Rт
должны обеспечивать в
любом режиме работы
(подъем, спуск расчет- l
ного груза, перегон по- l0 dр
рожних сосудов) замед- ления при предохрани-
тельном и рабочем тор- c
 можении таких величин, б
можении таких величин, бпри которых коэффици- d
ент безопасности против Rт
скольжения канатов по футеровке шкива будет lне менее 1,25.
р
Полученные дан- l0 d
наборных плит тормоз- ного груза nили для без- грузовых приводов тор- моза – расчетную вели-
Рис.28.Кинематическиесхемы
исполнительныхоргановтормозов подъемныхмашинс грузом (а)
и без груза (б)
dпр
чину затяжки пружинного блока F,
n=(Gт – Gп)/ G;
F= (Qт – gGп)/ z,
где Gп – масса подвижных частей привода тормоза, участвующих в торможении, кг; G– масса одной наборной плиты тормозного гру- за, кг; z–жесткость пружинного блока, Н/мм.
Необходимое давление воздуха в цилиндре рабочего тормо- жения для полного оттормаживания машины по затяжке пружинно- го блока, для приведенных кинематических схем
Ро =
4[gGp
z(FHï)] ,
p p
75
где Нп – величина хода поршня цилиндра рабочего торможения, мм;
р – КПД цилиндра рабочего торможения, р = 0,9 – для машин с пружинными тормозами, р = 0,7 – для машин с грузопневматиче- скими приводами; dр – диаметр поршня цилиндра рабочего тормо- жения, м.
Необходимое давление воздуха в цилиндрах предохрани- тельного торможения по массе тормозного груза на одном приводе
4g(Gï
-
Gï ) ,
Рп =
(d2 d2 )
ï ø ï
где Gп – суммарная масcа тормозного груза, кг; dп – диаметр поршня цилиндра предохранительного торможения, м; dш – диаметр штока цилиндра предохранительного торможения, м; п = 0,9 – КПД ци- линдра предохранительного торможения.
По фактической массе тормозного груза или затяжке пру- жинного блока определяют расчетные тормозные моменты, после чего при необходимости вносят корректировки.
- Регулятор давления и электропневматические клапаны
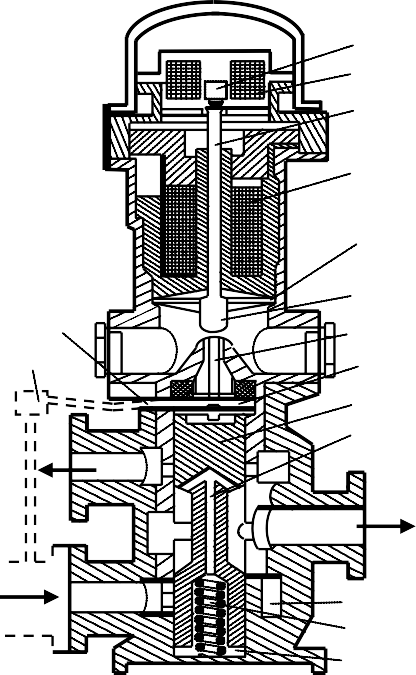
Регулятор давления РД служит для управления тормозными приводами подъемных машин в период рабочего торможения. Принцип действия РД может быть рассмотрен на примере унифици- рованного регулятора РДУ-1 (рис.29), описанного в работе [13]. Ос- новной частью РД служит золотниковый распределитель, внутри которого перемещается золотник 11. Вес золотника уравновешива- ется действием пружины 14. Сжатый воздух из сети подается в кольцевую камеру 13, а также через фильтр 1 и калиброванное от- верстие 2 в камеру управления 10.
Давление над золотником регулируется путем измерения выходного отверстия 9. Величина зазора между соплом отверстия 9 и заслонкой 8 регулируется за счет действия электромагнита управ- ления, состоящего из сердечника 5 и катушки 6. Увеличение тока в катушке 6 приводит к приближению заслонки к отверстию 9. При
76
 3
34
5
6
7
2
1
Выхлоп
в глушитель
От источника давления
8
9
10
11
12
В цилиндр рабочего тормоза
13
14
15
Рис.29. Электропневматический регулятор давления типа РД
этом давление в камере управления повышается. При уменьшении тока якорь отходит под действием пружин 7.
Золотник находится в равновесном положении под действи- ем давлений со стороны камеры управления и подзолотниковой ка- меры (камеры обратной связи) 15, которая отверстием 12 в золотни- ке соединена с ЦРТ.
При увеличении давления в камере управления золотник перемещается вниз и соединяет воздухосборник с ЦРТ. По мере увеличения давления в ЦРТ растет давление и в камере обратной связи, что вызывает обратную перестановку золотника в среднее положение.
При уменьшении давления в камере управления золотник поднимается вверх и соединяет ЦРТ через глушитель с атмосферой.
77
Давление в ЦРТ и камере обратной