ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 11.04.2024
Просмотров: 333
Скачиваний: 1
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.

СОДЕРЖАНИЕ
ОБЩИЕ ПОЛОЖЕНИЯ ТЕОРИИ ШАХТНЫХ ПОДЪЕМНЫХ УСТАНОВОК
ОСНОВНЫЕ ПАРАМЕТРЫ ШАХТНОЙ ПОДЪЕМНОЙ УСТАНОВКИ
Определение грузоподъемности подъемного сосуда
Продолжительность цикла и чистое время подъема
Подъемные канаты для вертикального подъема
Уравновешивающие (хвостовые) канаты
Статические сопротивления при вертикальном подъеме
Статические сопротивления при спуске груза
СИСТЕМА ПОДЪЕМА С ПРОТИВОВЕСnl
(см. уравнение (20)) в основном наличием коэффициента 0,5, а также численным значением коэффициента k, учитывающего шахтные сопротивления. Его значения приведены в разделе 2.4.
Системы с проти-
вовесом, предназначен- ные для подъема и спуска людей и грузов по на- клонным и вертикаль- ным выработкам, в со-
а б
h'
h'
 Fс"т Fс'т
Fс"т Fс'т
Fс'т
x
x
Q'
Fс"т
ВПП
ответствии с требова- ниями ПБ [4], должны удовлетворять следую- щим условиям:
G
nx; px
n; p
Н
Q"+Q'
Н
n; p
n; p
испытаниях к обоим кана- x x
там предъявляются оди- G
x
x
наковые требования;
НПП
hх
hх
Рис.21. Расчетные схемы для определения статических сопротивлений при системе подъема
«сосуд с противовесом»
61
 а
а
g∆pН
Fст РХ ХХ
0,5k′gQ
0,4gQ
0 Н/2
h0 Н/2 х
Н Н
б
 v РХ ХХ
v РХ ХХ
vmax
0
t1 t3
в
vmax
t4 Θ t7 t8 t5 t6
t10 Θ t
 F
F
Fэф
t1 t2
t3 t4
t5 Θ
t6 t7 t8
Тц
t9 t10 Θ t
 Рис.22.Диаграммарабочегоихолостогоходовдлясистемы«сосудспротивовесом»
Рис.22.Диаграммарабочегоихолостогоходовдлясистемы«сосудспротивовесом»
62
а– статических сопротивлений; б– скорости; в– движущих усилий на фоне статических сопротивлений
массы максимального числа людей, помещающихся в сосуде; масса противовеса грузолюдских установок – сумме массы клетки и поло- вины массы максимального расчетного груза, который поднимается в клети. При транспортировании людей на грузолюдских подъемных установках допускается в отдельных случаях уменьшение массы

противовеса до значения, равного массе клети с порожними ваго- нетками.
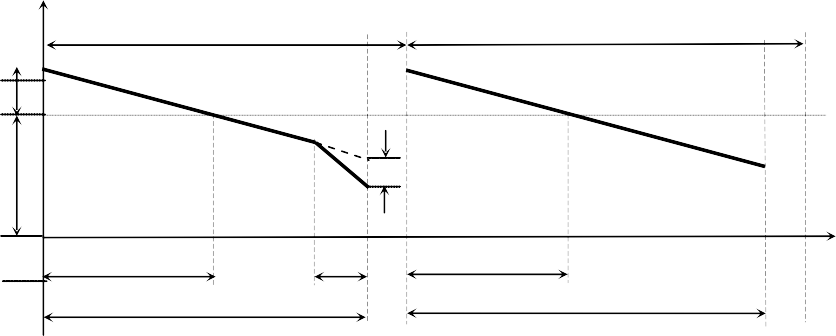
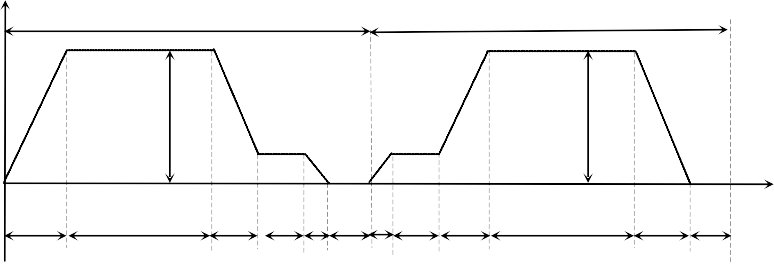
В связи с наличием в системе подъема с противовесом рабо- чего и холостого ходов полный цикл состоит из двух полуциклов. Это приводит к необходимости рассчитывать статические сопротив- ления, кинематические параметры и динамические усилия такого подъема по отдельным полуциклам, так как в зависимости от типа и конструкции подъемного сосуда может нарушаться идентичность обоих ходов по упомянутым факторам и параметрам. В частности, при скипе с донной разгрузкой рабочий ход содержит операцию частичной разгрузки сосуда (0,4gQ) в конце подъема на участке ho (рис.22, а). Холостой ход (спуск порожнего сосуда) отличается от рабочего тем, что частичная разгрузка отсутствует.
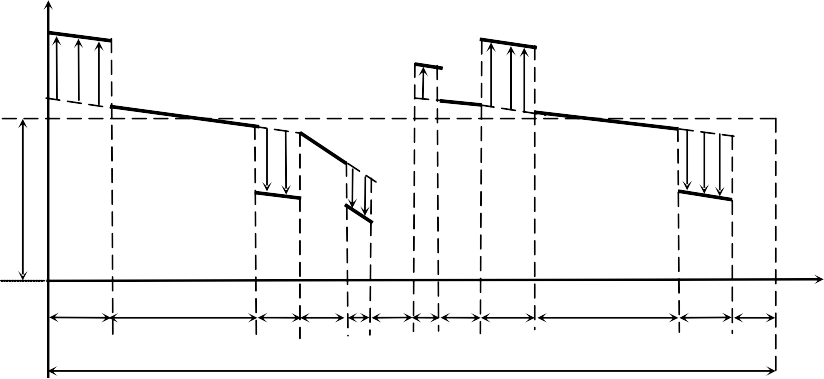
В силу указанных особенностей статики и кинематики сис- темы подъема с противовесом диаграммы движущих
усилий в обоих полуциклах (рис.22, в) различны. Это необходимо учитывать при определении эффективного усилия двигателя и рассчитывать его по диаграмме движущих усилий за полный цикл подъема.
Для надежной и безопасной работы подъемной машины пре- дусматриваются устройства защиты, блокировки, ограничители ско- рости, регуляторы расхода, устройства контроля проскальзывания канатов и путевые выключатели.
Устройства для контроля скольжения канатов отключают двигатель и включают предохранительный тормоз [12].
63
Путевые программные аппараты выполняют следующие функции:
В настоящее время практически
Системы с проти-
вовесом, предназначен- ные для подъема и спуска людей и грузов по на- клонным и вертикаль- ным выработкам, в со-
а б
h'
h'
Fс"т Fс'т Fс'т
x
x
Q'
Fс"т
ВПП
ответствии с требова- ниями ПБ [4], должны удовлетворять следую- щим условиям:
-
при надзоре и
G
nx; px
n; p
Н
Q"+Q'
Н
n; p
n; p
испытаниях к обоим кана- x x
там предъявляются оди- G
x
x
наковые требования;
-
масса противо- веса установок, предна- значенных исключитель- но для подъема людей, должна быть равна сумме массы сосуда и половины
НПП
hх
hх
Рис.21. Расчетные схемы для определения статических сопротивлений при системе подъема
«сосуд с противовесом»
61
аg∆pН
Fст РХ ХХ
0,5k′gQ
0,4gQ
0 Н/2
h0 Н/2 х
Н Н
б
v РХ ХХvmax
0
t1 t3
в
vmax
t4 Θ t7 t8 t5 t6
t10 Θ t
FFэф
t1 t2
t3 t4
t5 Θ
t6 t7 t8
Тц
t9 t10 Θ t
Рис.22.Диаграммарабочегоихолостогоходовдлясистемы«сосудспротивовесом»62
а– статических сопротивлений; б– скорости; в– движущих усилий на фоне статических сопротивлений
массы максимального числа людей, помещающихся в сосуде; масса противовеса грузолюдских установок – сумме массы клетки и поло- вины массы максимального расчетного груза, который поднимается в клети. При транспортировании людей на грузолюдских подъемных установках допускается в отдельных случаях уменьшение массы
противовеса до значения, равного массе клети с порожними ваго- нетками.
- Особенности статики, кинематики и динамики подъема с противовесом
В связи с наличием в системе подъема с противовесом рабо- чего и холостого ходов полный цикл состоит из двух полуциклов. Это приводит к необходимости рассчитывать статические сопротив- ления, кинематические параметры и динамические усилия такого подъема по отдельным полуциклам, так как в зависимости от типа и конструкции подъемного сосуда может нарушаться идентичность обоих ходов по упомянутым факторам и параметрам. В частности, при скипе с донной разгрузкой рабочий ход содержит операцию частичной разгрузки сосуда (0,4gQ) в конце подъема на участке ho (рис.22, а). Холостой ход (спуск порожнего сосуда) отличается от рабочего тем, что частичная разгрузка отсутствует.
В силу указанных особенностей статики и кинематики сис- темы подъема с противовесом диаграммы движущих
усилий в обоих полуциклах (рис.22, в) различны. Это необходимо учитывать при определении эффективного усилия двигателя и рассчитывать его по диаграмме движущих усилий за полный цикл подъема.
- 1 ... 19 20 21 22 23 24 25 26 27
УПРАВЛЕНИЕ ШАХТНЫМ ПОДЪЕМОМ
Для надежной и безопасной работы подъемной машины пре- дусматриваются устройства защиты, блокировки, ограничители ско- рости, регуляторы расхода, устройства контроля проскальзывания канатов и путевые выключатели.
Устройства для контроля скольжения канатов отключают двигатель и включают предохранительный тормоз [12].
63
-
Путевые программные аппараты
Путевые программные аппараты выполняют следующие функции:
-
Выдают импульсы в отдельных точках пути движения со- судов для осуществления необходимых переключений в схеме управления шахтной подъемной машины. -
Выдают сигналы сельсинному указателю глубины в зави- симости от положения сосудов. -
Задают программу движения машины при автоматическом управлении. -
Осуществляют контроль фактической скорости в период разгона и установившейся скорости. -
Осуществляют контроль целостности кинематической це- пи передающее вращение от привода к валу шахтной подъемной машины.
В настоящее время практически