ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 20.10.2024
Просмотров: 172
Скачиваний: 0

СОДЕРЖАНИЕ
Часть I. Способы передачи сообщений
1.1 Спектры периодических сигналов
1.2. Спектры непериодических сигналов
1.3. Сигналы электросвязи и их спектры
2.1. Принципы передачи сигналов электросвязи
3.1. Понятие о цифровых сигналах
3.2. Дискретизация аналоговых сигналов
3.3. Квантование и кодирование
3.4. Восстановление аналоговых сигналов
Глава 4. Принципы многоканальной передачи
4.1. Одновременная передача сообщений
4.2. Частотное разделение каналов
4.3. Временное разделение каналов
Глава 5. Цифровые системы передачи
5.1. Формирование группового сигнала
6.3. Регенерация цифровых сигналов
5.4. Помехоустойчивое кодирование
6.1. Плезиохронная цифровая иерархия
6.2. Синхронная цифровая иерархия
7.3. Волоконно-оптические кабельные линии
8.1. Предпосылки создания транспортных сетей
8.2. Системы передачи для транспортной сети
Vc низшего порядка (Low order vc, lovc)
Vc высшего порядка (High order vc, hovc)
8.3. Модели транспортных сетей
8.4. Элементы транспортной сети
8.5. Архитектура транспортных сетей
Часть II. Службы электросвязи. Телефонные службы и службы документальной электросвязи
Глава 9. Основные понятия и определения
9.1. Информация, сообщения, сигналы
9.2. Системы и сети электросвязи
9.3. Эталонная модель взаимосвязи открытых систем
9.4. Методы коммутации в сетях электросвязи
9.5 Методы маршрутизации в сетях электросвязи
Т а б л и ц а 9.2. Устройства, реализующие функции маршрутизации
10.1. Услуги, предоставляемые общегосударственной системой автоматизированной телефонной связи
10.3. Расчет коммутационного узла с коммутацией каналов 10.3.1. Модель коммутационного узла
10.3.1 Модель коммутационного узла
10.3.2. Структура коммутационных полей станций и узлов
10.3.3. Элементы теории телетрафика
11.2. Направления развития телеграфной связи
Глава 12. Службы пд. Защита от ошибок и преобразование сигналов
12.2. Сигналы и виды модуляции, используемые в современных модемах
13.1. Компьютеры — архитектура и возможности
13.2. Принципы построения компьютерных сетей
13.3. Международные стандарты на аппаратные и программные средства компьютерных сетей
13.4. Сетевые операционные системы
13.5. Локальные компьютерные сети
13.6. Глобальные компьютерные сети
13.7. Телефонная связь по компьютерным сетям
14.1. Основы факсимильной связи
14.2. Организация факсимильной связи
Глава 15. Другие службы документальной электросвязи
Глава 16. Единая система документальной электросвязи
16.1. Интеграция услуг документальной электросвязи [1]
16.2. Назначение и основные принципы построения служб обработки сообщений [2]
16.3. Многофункциональные терминалы
Глава 17. Обеспечение информационной безопасности в телекоммуникационных системах
17.2. Правовые и организационные аспекты информационной безопасности
17.3. Технические аспекты информационной безопасности
Часть III. Интеграция сетей и служб электросвязи
Глава 18. Узкополосные цифровые сети интегрального обслуживания (у-цсио)
18.1. Пути перехода к узкополосной цифровой сети интегрального обслуживания
18.2. Службы и услуги узкополосной цсио
18.3. Система управления у-цсио
Глава 19. Широкополосные и интеллектуальные сети
19.1. Условия и этапы перехода к широкополосной сети интегрального обслуживания (ш-цсио)
19.3. Способы коммутации в ш-цсио
19.4. Построение коммутационных полей станций ш-цсио
19.5. Причины и условия перехода к интеллектуальной сети (ис)
Глава 20. Система межстанционной сигнализации по общему каналу в цсио
20.1. Понятие об общем канале сигнализации
20.2. Протоколы системы сигнализации № 7 itu-t
20.3. Способы защиты от ошибок в окс № 7
20.5. Способы построения сигнальной сети
Глава 21. Широкополосные сети и оборудование компании «Huawei Technologies Co, Ltd»
21.1. Оптическая сеть абонентского доступа с интеграцией услуг honet
21.2. Построение транспортных сетей на базе оборудования компании «Huawei Technologies Co., Ltd»
21.3. Цифровая коммутационная система с программным управлением с&с08
21.4. Высокоскоростной коммутирующий маршрутизатор Radium 8750
Часть IV. Современные методы управления в телекоммуникациях
22.1. Многоуровневое представление задач управления телекоммуникациями
22.2. Функциональные группы задач управления
Глава 23. Интегрированные информационные системы управления предприятиями электросвязи
23.1. Понятия и определения в области информационных систем управления предприятием
Глава 24. Управление услугами. Качество предоставляемых услуг
24.1. Система качества услуг электросвязи
24.2. Базовые составляющие обеспечения качества услуги
24.3. Оценка качества услуг связи с точки зрения пользователя и оператора связи
Глава 25. Управление услугами.
25.3. Централизованный способ построения системы расчетов
25.4. Интеграция аср с системами управления tmn
25.5. Основные технические требования для аср
25.6. Обзор автоматизированных систем расчетов
Глава 26. Управление сетями и сетевыми элементами
26.1. Архитектура систем управления сетями и сетевыми элементами
26.2. Системы управления первичными и вторичными сетями
26.3. Принципы построения системы управления
Глава 27. Решения компании strom telecom в области tmn (Foris oss)
27.1. Общая характеристика семейства продуктов Foris oss
27.2. Автоматизация расчетов. Подсистема TelBill
27.3. Многофункциональные подсистемы сбора данных и взаимодействия с атс
27.4. Подсистема сбора данных и их биллинговой предобработки TelCharge
27.5. Подсистемы TelRes, TelTe, TelRc
27.6. Система «Электронный замок»
27.7. Подсистема поддержки клиентов tccs (Foris Customer Care Systems)
Глава 2. Модуляция
2.1. Принципы передачи сигналов электросвязи
Перенос сигнала из одной точки пространства в другую осуществляет система электросвязи. Электрический сигнал является, по сути, формой представления сообщения для передачи его системой электросвязи
Источник сообщения (рис. 2.1) формирует сообщение a(f), которое с помощью специальных устройств преобразуется в электрический сигнал s(t). При передаче речи такое преобразование выполняет микрофон, при передаче изображения - электронно-лучевая трубка, при передаче телеграммы - передающая часть телеграфного аппарата.
Чтобы передать сигнал в системе электросвязи, нужно воспользоваться каким-либо переносчиком. В качестве переносчика естественно использовать те материальные объекты, которые имеют свойство перемещаться в пространстве, например, электромагнитное поле в проводах (проводная связь), в открытом пространстве (радиосвязь), световой луч (оптическая связь). На рис. 2.2 показано использование шкалы частот и волн различных типов для различных видов связи.
Таким образом, в пункте передачи (рис. 2.1) первичный сигнал s(t) необходимо преобразовать в сигнал v(t), удобный для его передачи по соответствующей среде распространения. В пункте приема выполняется обратное преобразование. В отдельных случаях (например, когда средой распространения является пара физических проводов, как в городской телефонной связи) указанное преобразование сигнала может отсутствовать.
Доставленный в пункт приема сигнал должен быть снова преобразован в сообщение (например, с помощью телефона или громкоговорителя при передаче речи, электронно-лучевой трубки при передаче изображения, приемной части телеграфного аппарата при передаче телеграммы) и затем передан получателю.


Рис. 2.1. Система электросвязи
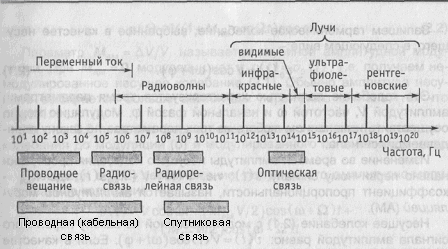
Рис. 2.2. Использование шкалы частот в электросвязи
Передача
информации
всегда
сопровождается
неизбежным
действием
помех
и
искажений.
Это
приводит
к
тому,
что
сигнал
на
выходе
системы
электросвязи
![]() и
принятое
сообщение
и
принятое
сообщение
![]() могут
в
какой-то
мере
отличаться
от
сигнала
на
входе
s(t)
и
переданного
сообщения
a(t).
Степень
соответствия
принятого
сообщения
переданному
называют
верностью
передачи
информации.
могут
в
какой-то
мере
отличаться
от
сигнала
на
входе
s(t)
и
переданного
сообщения
a(t).
Степень
соответствия
принятого
сообщения
переданному
называют
верностью
передачи
информации.
Для различных сообщений качество их передачи оценивается по-разному. Принятое телефонное сообщение должно быть достаточно разборчивым, абонент должен быть узнаваемым. Для телевизионного сообщения существует стандарт (хорошо известная всем телезрителям таблица на экране телевизора), по которому оценивается качество принятого изображения.
Количественной оценкой верности передачи дискретных сообщений служит отношение числа ошибочно принятых элементов сообщения к числу переданных элементов - частота ошибок (или коэффициент ошибок).
2.2. Амплитудная модуляция
Обычно в качестве переносчика используют гармоническое колебание высокой частоты - несущее колебание. Процесс преобразования первичного сигнала заключается в изменении одного или нескольких параметров несущего колебания по закону изменения первичного сигнала (т.е. в наделении несущего колебания признаками первичного сигнала) и называется модуляцией.
Запишем гармоническое колебание, выбранное в качестве несущего, в следующем виде:
![]() (2.1)
(2.1)
Это колебание полностью характеризуется тремя параметрами: амплитудой V, частотой ω и начальной фазой φ. Модуляцию можно осуществить изменением любого из трех параметров по закону передаваемого сигнала.
Изменение во времени амплитуды несущего колебания пропорционально первичному сигналу s(t), т.е. V(t) = V + kAMs(t), где kAM - коэффициент пропорциональности, называется амплитудной модуляцией (АМ).
Несущее колебание (2.1) с модулированной по закону первичного сигнала амплитудой равно: v(t) = V(t)cos(ωt + φ). Если в качестве первичного сигнала использовать то же гармоническое колебание (но с более низкой частотой Ω) s(t) = ScosΩt, то модулированное колебание запишется в виде (для упрощения взято φ = 0): V(t) = (V + kAMScosΩt)cosωt.
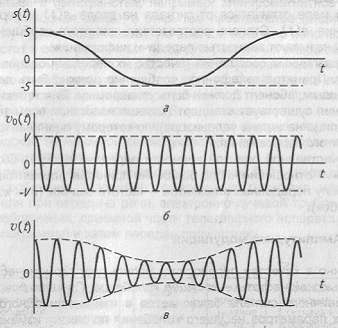
Рис. 2.3. Передаваемый сигнал (а), несущее колебание (б) и модулированный сигнал (в)
Вынесем за скобки V и обозначим ΔV = kAMS и MAM = ΔV/V. Тогда

![]() (2.2)
(2.2)
Параметр МАМ
= ΔV/V
называется глубиной амплитудной
модуляции. При МАМ
= 0 модуляции
нет и
![]() ,
т.е. получаем немодулированное несущее
колебание (2.1). Обычно амплитуда несущего
выбирается больше амплитуды первичного
сигнала, так что MAM
≤ 1.
,
т.е. получаем немодулированное несущее
колебание (2.1). Обычно амплитуда несущего
выбирается больше амплитуды первичного
сигнала, так что MAM
≤ 1.
На рис. 2.3 показана форма передаваемого сигнала (а), несущего колебания до модуляции (б) и модулированного по амплитуде несущего колебания (в).
Произведя в (2.2) перемножение, получим, что амплитудно-модулированное колебание
![]()
![]()
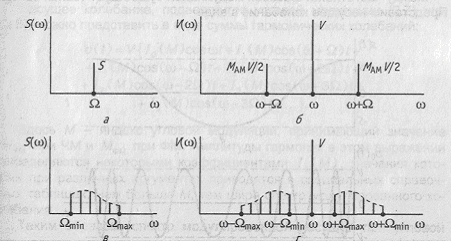
состоит из суммы трех гармонических составляющих с частотами ω, ω+Ω и ω-Ω и амплитудами соответственно V, MAMV/2 и MAMV/2. Таким образом, спектр амплитудно-модулированного колебания (или АМ-колебания) состоит из частоты несущего колебания и двух боковых частот, симметричных относительно несущей, с одинаковыми амплитудами (рис. 2.4, б). Спектр первичного сигнала s(t) приведен на рис 2.4, а.
Если первичный сигнал сложный и его спектр ограничен частотами Ωmin и Ωmax (рис. 2.4, в), то спектр АМ-колебания будет состоять из несущего колебания и двух боковых полос, симметричных относительно несущей (рис. 2.4, г).
Анализ энергетических соотношений показывает, что основная мощность АМ-колебания заключена в несущем колебании, которое не содержит полезной информации. Нижняя и верхняя боковые полосы несут одинаковую информацию и имеют более низкую мощность.
2.3 Угловая модуляция
Можно изменять во времени пропорционально первичному сигналу s(t) не амплитуду, а частоту несущего колебания:
ω(t) = ω + kЧМs(t) = ω + ΔωcosΩt, (2.3)
где kЧМ – коэффициент пропорциональности; величина Δω = kЧМS – называется девиацией частоты (фактически это максимальное отклонение частоты модулированного сигнала от частоты несущего колебания).
Такой вид модуляции называется частотной модуляцией. На рис. 2.5 показано изменение частоты несущего колебания при частотной модуляции.
При изменении фазы несущего колебания получим фазовую модуляцию
φ(t) = φ + kФМs(t) = φ + ΔφcosΩt, (2.4)
где kФМ – коэффициент пропорциональности; Δφ = kФМS = МФМ – индекс фазовой модуляции.
Между частотной и фазовой модуляцией существует тесная связь.
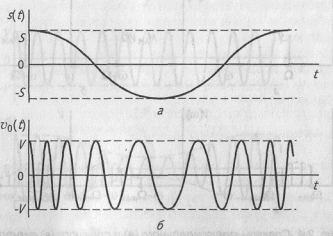
Рис. 2.5. Исходный (а) и частотно-модулированный (б) сигналы
Представим несущее колебание в виде
![]() ,
(2.5)
,
(2.5)
где φ – начальная фаза колебания, а ψ(t) – его полная фаза. Между фазой ψ(t) и частотой ω существует связь:
![]() (2.6)
(2.6)
Подставим в (2.6) выражение (2.3) для ω(t) при частотной модуляции:
![]()
Величина МЧМ = Δω/Ω называется индексом частотной модуляции.
Частотно-модулированное колебание запишется в виде:
v(t) = Vcos(ωt + МЧМ sinΩt + φ). (2.7)
Фазо-модулированное колебание с учетом (2.4) для φ(t) следующее:
v(t) = Vcos(ωt + МФМ cosΩt + φ). (2.8)
Из сравнения (2.7) и (2.8) следует, что по внешнему виду сигнала v(t) трудно различить, какая модуляция применена – частотная или фазовая. Часто оба эти вида модуляции называют угловой модуляцией, а МЧМ и МФМ – индексами угловой модуляции.
Несущее колебание, подвергнутое угловой модуляции (2.7) или (2.8), можно представить в виде суммы гармонических колебаний:

Здесь М – индекс угловой модуляции, принимающий значение МЧМ при ЧМ и МФМ при ФМ. Амплитуды гармоник в этом выражении определяются некоторыми коэффициентами Ik(M), значения которых при различных аргументах приводятся в специальных справочных таблицах. Чем больше М, тем шире спектр модулированного колебания.
Таким образом, спектр модулированной несущей при угловой модуляции даже при гармоническом первичном сигнале s(t) состоит из бесконечного числа дискретных составляющих, образующих нижнюю и верхнюю боковые полосы спектра, симметричные относительно несущей частоты и имеющие одинаковые амплитуды (рис. 2.6).
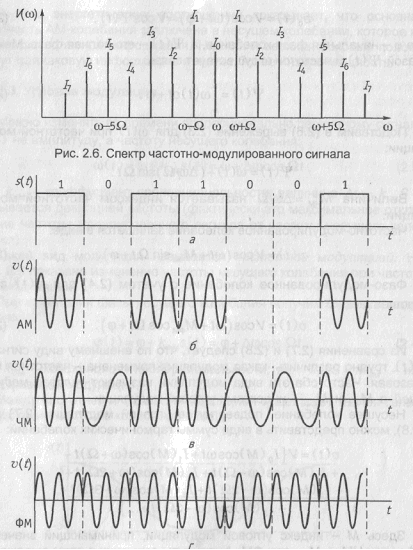
Рис. 2.7. Дискретный сигнал (а) и несущее колебание, модулированное этими сигналами по амплитуде (б), частоте (в) и фазе (г)
В случае, если первичный сигнал s(t) имеет форму, отличную от синусоидальной, и занимает полосу частот от Qmin до Qmax, то спектр модулированного колебания при угловой модуляции будет иметь еще более сложный вид.
Иногда отдельно рассматривают модуляцию гармонического несущего колебания по амплитуде, частоте или фазе дискретными первичными сигналами s(t), например телеграфными или передачи данных, i i.i рис. 2.7 показан дискретный первичный сигнал (а), несущее колебание, модулированное по амплитуде (б), частоте (в) и фазе (г).
Модуляцию гармонического несущего колебания первичным сигом s(t) называют непрерывной, так как в качестве переносчика выбран непрерывный периодический сигнал v0(t).
Сравнение различных видов непрерывной модуляции позволяет выявить их особенности. При амплитудной модуляции ширина спектра модулированного сигнала, как правило, значительно меньше, чем при угловой модуляции (частотной и фазовой). Таким образом, нали-
экономия частотного спектра: для амплитудно-модулированных сигналов можно отводить при передаче более узкую полосу частот.
будет показано дальше, это особенно важно при построении многоканальных систем передачи.