ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 20.10.2024
Просмотров: 228
Скачиваний: 0

СОДЕРЖАНИЕ
Часть I. Способы передачи сообщений
1.1 Спектры периодических сигналов
1.2. Спектры непериодических сигналов
1.3. Сигналы электросвязи и их спектры
2.1. Принципы передачи сигналов электросвязи
3.1. Понятие о цифровых сигналах
3.2. Дискретизация аналоговых сигналов
3.3. Квантование и кодирование
3.4. Восстановление аналоговых сигналов
Глава 4. Принципы многоканальной передачи
4.1. Одновременная передача сообщений
4.2. Частотное разделение каналов
4.3. Временное разделение каналов
Глава 5. Цифровые системы передачи
5.1. Формирование группового сигнала
6.3. Регенерация цифровых сигналов
5.4. Помехоустойчивое кодирование
6.1. Плезиохронная цифровая иерархия
6.2. Синхронная цифровая иерархия
7.3. Волоконно-оптические кабельные линии
8.1. Предпосылки создания транспортных сетей
8.2. Системы передачи для транспортной сети
Vc низшего порядка (Low order vc, lovc)
Vc высшего порядка (High order vc, hovc)
8.3. Модели транспортных сетей
8.4. Элементы транспортной сети
8.5. Архитектура транспортных сетей
Часть II. Службы электросвязи. Телефонные службы и службы документальной электросвязи
Глава 9. Основные понятия и определения
9.1. Информация, сообщения, сигналы
9.2. Системы и сети электросвязи
9.3. Эталонная модель взаимосвязи открытых систем
9.4. Методы коммутации в сетях электросвязи
9.5 Методы маршрутизации в сетях электросвязи
Т а б л и ц а 9.2. Устройства, реализующие функции маршрутизации
10.1. Услуги, предоставляемые общегосударственной системой автоматизированной телефонной связи
10.3. Расчет коммутационного узла с коммутацией каналов 10.3.1. Модель коммутационного узла
10.3.1 Модель коммутационного узла
10.3.2. Структура коммутационных полей станций и узлов
10.3.3. Элементы теории телетрафика
11.2. Направления развития телеграфной связи
Глава 12. Службы пд. Защита от ошибок и преобразование сигналов
12.2. Сигналы и виды модуляции, используемые в современных модемах
13.1. Компьютеры — архитектура и возможности
13.2. Принципы построения компьютерных сетей
13.3. Международные стандарты на аппаратные и программные средства компьютерных сетей
13.4. Сетевые операционные системы
13.5. Локальные компьютерные сети
13.6. Глобальные компьютерные сети
13.7. Телефонная связь по компьютерным сетям
14.1. Основы факсимильной связи
14.2. Организация факсимильной связи
Глава 15. Другие службы документальной электросвязи
Глава 16. Единая система документальной электросвязи
16.1. Интеграция услуг документальной электросвязи [1]
16.2. Назначение и основные принципы построения служб обработки сообщений [2]
16.3. Многофункциональные терминалы
Глава 17. Обеспечение информационной безопасности в телекоммуникационных системах
17.2. Правовые и организационные аспекты информационной безопасности
17.3. Технические аспекты информационной безопасности
Часть III. Интеграция сетей и служб электросвязи
Глава 18. Узкополосные цифровые сети интегрального обслуживания (у-цсио)
18.1. Пути перехода к узкополосной цифровой сети интегрального обслуживания
18.2. Службы и услуги узкополосной цсио
18.3. Система управления у-цсио
Глава 19. Широкополосные и интеллектуальные сети
19.1. Условия и этапы перехода к широкополосной сети интегрального обслуживания (ш-цсио)
19.3. Способы коммутации в ш-цсио
19.4. Построение коммутационных полей станций ш-цсио
19.5. Причины и условия перехода к интеллектуальной сети (ис)
Глава 20. Система межстанционной сигнализации по общему каналу в цсио
20.1. Понятие об общем канале сигнализации
20.2. Протоколы системы сигнализации № 7 itu-t
20.3. Способы защиты от ошибок в окс № 7
20.5. Способы построения сигнальной сети
Глава 21. Широкополосные сети и оборудование компании «Huawei Technologies Co, Ltd»
21.1. Оптическая сеть абонентского доступа с интеграцией услуг honet
21.2. Построение транспортных сетей на базе оборудования компании «Huawei Technologies Co., Ltd»
21.3. Цифровая коммутационная система с программным управлением с&с08
21.4. Высокоскоростной коммутирующий маршрутизатор Radium 8750
Часть IV. Современные методы управления в телекоммуникациях
22.1. Многоуровневое представление задач управления телекоммуникациями
22.2. Функциональные группы задач управления
Глава 23. Интегрированные информационные системы управления предприятиями электросвязи
23.1. Понятия и определения в области информационных систем управления предприятием
Глава 24. Управление услугами. Качество предоставляемых услуг
24.1. Система качества услуг электросвязи
24.2. Базовые составляющие обеспечения качества услуги
24.3. Оценка качества услуг связи с точки зрения пользователя и оператора связи
Глава 25. Управление услугами.
25.3. Централизованный способ построения системы расчетов
25.4. Интеграция аср с системами управления tmn
25.5. Основные технические требования для аср
25.6. Обзор автоматизированных систем расчетов
Глава 26. Управление сетями и сетевыми элементами
26.1. Архитектура систем управления сетями и сетевыми элементами
26.2. Системы управления первичными и вторичными сетями
26.3. Принципы построения системы управления
Глава 27. Решения компании strom telecom в области tmn (Foris oss)
27.1. Общая характеристика семейства продуктов Foris oss
27.2. Автоматизация расчетов. Подсистема TelBill
27.3. Многофункциональные подсистемы сбора данных и взаимодействия с атс
27.4. Подсистема сбора данных и их биллинговой предобработки TelCharge
27.5. Подсистемы TelRes, TelTe, TelRc
27.6. Система «Электронный замок»
27.7. Подсистема поддержки клиентов tccs (Foris Customer Care Systems)
Глава 3. Цифровые сигналы
3.1. Понятие о цифровых сигналах
Во всем мире сейчас активно развивается цифровая телефония, i i юство цифровой телефонной связи значительно выше, чем обыч-II'Hi, поскольку цифровые сигналы меньше боятся всякого рода помех. Цифровой телефон позволяет предоставить нам массу дополни-ини.ных услуг. Появляется возможность к одной и той же телефонной мпмии подключить, казалось бы, внешне совершенно различные устройства - телефонный аппарат и персональный компьютер. Через цифровую телефонную сеть владельцам персональных компьютеров открывается доступ к банкам данных с широким ассортиментом информации.
В наши дома приходит цифровое кабельное телевидение, дающее необыкновенную четкость изображения и сочность красок; на прилавках магазинов мы можем увидеть аппаратуру цифровой зву-и видеозаписи, обеспечивающую уникальное качество звука и и шбражения.
Что же такое цифровой сигнал? Впервые мы столкнулись с ним, ми да обсуждали факсимильный сигнал, полученный с черно-белого изображения, не содержащего полутонов. Такой цифровой сигнал п.ц.1зан на рис. 1.12. Однако реальный факсимильный сигнал чаще бывает не цифровым, а аналоговым. Цифровыми сигналами являются телеграфные сигналы и сигналы ипродачи данных, вырабатываемые компьютерами (см. рис. 1.14).
Таким образом, можно сказать, что цифровой сигнал - это по-i пидовательность импульсов. Если принять условно факт наличия нмпульра за 1, а факт его отсутствия за 0, то импульсную последовательность можно представить как чередование двух цифр: 0 и 1.
Отсюда и появилось название «цифровой сигнал». Число, которое принимает только два значения: 0 и 1, называется «двоичной цифрой». В переводе на английский это звучит как «binary digit». В практике широко вошло сокращение, составленное из начальных и конечных английского словосочетания, т.е. слово «bit», что на английском читается как бит. Итак, одна позиция в цифровом сигнале есть 1 бит; это может быть либо 0, либо 1. Восемь позиций в цифровом сигнале объединяется понятием байт.
При передаче цифровых сигналов естественным образом вводится понятие скорости передачи - это количество бит, передаваемых в единицу времени, чаще всего - в секунду.
3.2. Дискретизация аналоговых сигналов
По своей природе многие сигналы (телефонные, факсимильные, телевизионные) не являются цифровыми. Это аналоговые, или непрерывные, сигналы.
Можно ли «переложить» живую человеческую речь на язык нулей и единиц, сохранив при этом все богатое разнообразие красок человеческого голоса, всю гамму человеческих эмоций? Другими словами, речь идет о том, как заменить непрерывный процесс последовательностью цифр, не потеряв при этом информации о непрерывном процессе.
С подобной проблемой мы сталкиваемся в жизни довольно часто. Если через очень короткие промежутки времени (скажем, через 1 с) наносить значения температуры воздуха на график, то получим множество точек, отражающих изменение температуры (рис. 3.1).
Таким образом, имеем дело не с непрерывной кривой изменения температуры, а лишь с ее значениями, отсчитанными через определенные промежутки времени. По сути говоря, мы описали некоторый непрерывный процесс последовательностью десятичных цифр. Подобный процесс называется дискретизацией непрерывного сигнала. Невыясненным остался вопрос, как часто следует брать отсчетные значения непрерывной кривой, чтобы отследить все ее изменения. Так, при более длительных промежутках времени между наблюдениями за температурой воздуха не удается отследить все ее быстрые изменения.
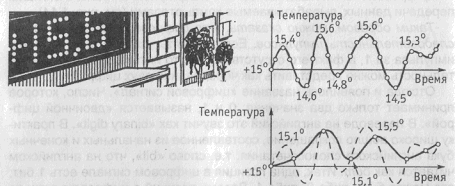
Рис. 3.1. Дискретное измерение температуры
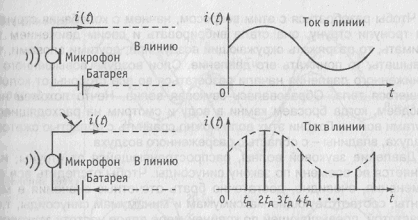
Рис. 3.2. Дискретизация телефонного сигнала
Аналогичный подход лежит в процессе дискретизации телефонного сигнала. Если в цепь микрофона (рис. 3.2), где ток является непрерывной функцией времени, встроить электронный ключ и периодиче-на короткие мгновения замыкать его, то ток в цепи будет иметь вид узких импульсов с амплитудами, повторяющими форму непрерывнoro сигнала, и представлять собой ничто иное, как дискретный сигнал (см. рис. 3.2).
Интервал времени tД через который отсчитываются значения непрерывного сигнала, называется интервалом дискретизации. Обратная величина 1/tД (обозначим ее fД) называется частотой взятия отсчетов, или частотой дискретизации.

Отсчеты непрерывного сигнала, так же, как и отсчеты температуры, следует брать с такой частотой (или через такой интервал времени), чтобы успевать отследить все, даже самые быстрые, изменения сигнала. Иначе при восстановлении этого сигнала по дискретным от-счетам часть информации будет потеряна и форма восстановленного сигнала будет отличаться от формы исходного (рис. 3.3). Это означает, что звук на приеме будет восприниматься с искажениями.
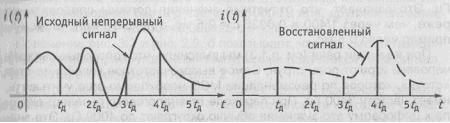
Рис. 3.3. Искажение формы восстановленного сигнала
Чтобы разобраться с этим вопросом, начнем с колебания струны. Вы тронули струну, она стала вибрировать и своим движением то сжимать, то разряжать окружающий воздух или, другими словами, то повышать, то понижать его давление. Слои воздуха повышенного и пониженного давления начали разбегаться во все стороны от колеблющегося тела. Образовалась звуковая волна. Нечто похожее наблюдаем, когда бросаем камни в воду и смотрим на расходящиеся кругами волны. Гребни этих волн можно сравнить с областью сжатого воздуха, впадины - с областью разреженного воздуха.
Давление звуковой волны, распространяющейся от струны, изменяется во времени по закону синусоиды. Чтобы отследить все ее изменения, очевидно, достаточно брать отсчетные значения в моменты, соответствующие максимумам и минимумам синусоиды, т.е. с частотой, превышающей по крайней мере вдвое частоту звукового колебания. Например, если струна совершает 20 колебаний/с (частота 20 Гц), то максимальное звуковое давление будет наблюдаться через каждый 1/20 с, т.е. через 50 мс. Максимумы и минимумы кривой звукового давления разделены интервалами в 25 мс. Значит, отсчетные значения по кривой должны следовать не реже, чем через 25 мс, или с частотой 40 отсчетов/с (40 Гц). Обычно отсчетные значения на кривой берут «с запасом»: не в 2 раза чаще, чем колеблется звук, а, скажем, в 10 раз. В этом случае они очень хорошо передают форму кривой.
Интересен случай, когда звуковые волны излучают две одновременно колеблющиеся струны. На рис. 3.4 показаны три варианта: вторая струна колеблется в 2, 3 и 10 раз чаще, чем первая. Давления двух звуковых волн на пластину, помещенную на их пути, складываются. График результирующего давления уже не является синусоидой. Мы видим, что быстрые изменения в этой кривой обусловлены более высокочастотным колебанием (в данном случае колебанием второй струны). Для того чтобы отследить все быстрые изменения результирующего звукового давления, отсчетные значения следует брать с частотой, по крайней мере, вдвое превышающей частоту колебания второй струны. В последнем варианте частота взятия отсчетных значений должна превышать 400 Гц. Это означает, что отсчетные значения должны следовать не реже, чем через 1/400 = 0,0025 с = 2,5 мс, а лучше - еще чаще, например через 0,5 мс.
При изучении речи (см. п.1.3) мы выяснили, что голосовые связки у человека играют роль струн. Самое высокочастотное колебание этих «струн», которое по рекомендации МСЭ необходимо еще учитывать, имеет частоту 3400 Гц. При переходе от аналогового речевого сигнала к цифровому это значение обычно округляют до 4000 Гц. Это значит, что при замене непрерывной кривой электрического тока на выходе микрофона телефонного аппарата отсчетными значениями по-следние необходимо брать с частотой 8000 Гц или, другими словами, не реже, чем через 1/8000 = 0,000125 с = 125 мкс.
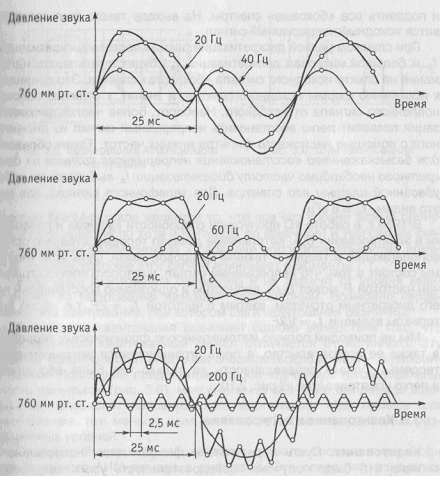
Рис. 3.4. Дискретизация кривых звукового давления при различных частотах колебания струн
Сравнение рис. 3.2 и рис. 2.9, б показывает, что при дискретизации сигнала узкими прямоугольными импульсами получается АИМ-сигнал, спектр которого изображен на рис. 2.10.
Спектр дискретного сигнала содержит спектр исходного сигнала (в диапазоне частот от 0 до F). Чтобы восстановить исходный сигнал из дискретного, достаточно пропустить дискретный сигнал через Фильтр нижних частот с граничной частотой полосы пропускания F и подавить все «боковые» спектры. На выходе такого фильтра появится исходный непрерывный сигнал.
При слишком редкой дискретизации (низкая частота дискретизации fД и большой интервал дискретизации tД) будет иметь место наложение на спектр исходного сигнала «бокового» спектра. Это приведет к искажению формы исходного спектра, и значит, к отличию восстановленного сигнала от исходного. Наоборот, более частая дискретизация позволит легко восстановить непрерывный сигнал из дискретного с помощью несложного фильтра нижних частот. Таким образом, для безыскаженного восстановления непрерывного сигнала из дискретного необходимо частоту дискретизации fД выбирать не ниже удвоенной ширины его спектра. Для телефонного сигнала, как мы это видим, fД = 8 кГц.
В 1933 г. в работе «О пропускной способности «эфира» и проволоки в электросвязи» В.А. Котельников доказал теорему, ставшую основополагающей в теории и технике цифровой связи. Суть этой теоремы состоит в том, что непрерывный сигнал, у которого спектр ограничен частотой F, может быть полностью и однозначно восстановлен по его дискретным отсчетам, взятым с частотой fд = 2F, т.е. через интервалы времени tД = 1/2F.
Мы не приводим полную математическую формулировку теоремы, а также ее доказательство, а лишь ограничиваемся указанием сути теоремы. Однако справедливость ее только что была обсуждена и легко усматривается из рис. 2.10.