ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 20.10.2024
Просмотров: 178
Скачиваний: 0

СОДЕРЖАНИЕ
Часть I. Способы передачи сообщений
1.1 Спектры периодических сигналов
1.2. Спектры непериодических сигналов
1.3. Сигналы электросвязи и их спектры
2.1. Принципы передачи сигналов электросвязи
3.1. Понятие о цифровых сигналах
3.2. Дискретизация аналоговых сигналов
3.3. Квантование и кодирование
3.4. Восстановление аналоговых сигналов
Глава 4. Принципы многоканальной передачи
4.1. Одновременная передача сообщений
4.2. Частотное разделение каналов
4.3. Временное разделение каналов
Глава 5. Цифровые системы передачи
5.1. Формирование группового сигнала
6.3. Регенерация цифровых сигналов
5.4. Помехоустойчивое кодирование
6.1. Плезиохронная цифровая иерархия
6.2. Синхронная цифровая иерархия
7.3. Волоконно-оптические кабельные линии
8.1. Предпосылки создания транспортных сетей
8.2. Системы передачи для транспортной сети
Vc низшего порядка (Low order vc, lovc)
Vc высшего порядка (High order vc, hovc)
8.3. Модели транспортных сетей
8.4. Элементы транспортной сети
8.5. Архитектура транспортных сетей
Часть II. Службы электросвязи. Телефонные службы и службы документальной электросвязи
Глава 9. Основные понятия и определения
9.1. Информация, сообщения, сигналы
9.2. Системы и сети электросвязи
9.3. Эталонная модель взаимосвязи открытых систем
9.4. Методы коммутации в сетях электросвязи
9.5 Методы маршрутизации в сетях электросвязи
Т а б л и ц а 9.2. Устройства, реализующие функции маршрутизации
10.1. Услуги, предоставляемые общегосударственной системой автоматизированной телефонной связи
10.3. Расчет коммутационного узла с коммутацией каналов 10.3.1. Модель коммутационного узла
10.3.1 Модель коммутационного узла
10.3.2. Структура коммутационных полей станций и узлов
10.3.3. Элементы теории телетрафика
11.2. Направления развития телеграфной связи
Глава 12. Службы пд. Защита от ошибок и преобразование сигналов
12.2. Сигналы и виды модуляции, используемые в современных модемах
13.1. Компьютеры — архитектура и возможности
13.2. Принципы построения компьютерных сетей
13.3. Международные стандарты на аппаратные и программные средства компьютерных сетей
13.4. Сетевые операционные системы
13.5. Локальные компьютерные сети
13.6. Глобальные компьютерные сети
13.7. Телефонная связь по компьютерным сетям
14.1. Основы факсимильной связи
14.2. Организация факсимильной связи
Глава 15. Другие службы документальной электросвязи
Глава 16. Единая система документальной электросвязи
16.1. Интеграция услуг документальной электросвязи [1]
16.2. Назначение и основные принципы построения служб обработки сообщений [2]
16.3. Многофункциональные терминалы
Глава 17. Обеспечение информационной безопасности в телекоммуникационных системах
17.2. Правовые и организационные аспекты информационной безопасности
17.3. Технические аспекты информационной безопасности
Часть III. Интеграция сетей и служб электросвязи
Глава 18. Узкополосные цифровые сети интегрального обслуживания (у-цсио)
18.1. Пути перехода к узкополосной цифровой сети интегрального обслуживания
18.2. Службы и услуги узкополосной цсио
18.3. Система управления у-цсио
Глава 19. Широкополосные и интеллектуальные сети
19.1. Условия и этапы перехода к широкополосной сети интегрального обслуживания (ш-цсио)
19.3. Способы коммутации в ш-цсио
19.4. Построение коммутационных полей станций ш-цсио
19.5. Причины и условия перехода к интеллектуальной сети (ис)
Глава 20. Система межстанционной сигнализации по общему каналу в цсио
20.1. Понятие об общем канале сигнализации
20.2. Протоколы системы сигнализации № 7 itu-t
20.3. Способы защиты от ошибок в окс № 7
20.5. Способы построения сигнальной сети
Глава 21. Широкополосные сети и оборудование компании «Huawei Technologies Co, Ltd»
21.1. Оптическая сеть абонентского доступа с интеграцией услуг honet
21.2. Построение транспортных сетей на базе оборудования компании «Huawei Technologies Co., Ltd»
21.3. Цифровая коммутационная система с программным управлением с&с08
21.4. Высокоскоростной коммутирующий маршрутизатор Radium 8750
Часть IV. Современные методы управления в телекоммуникациях
22.1. Многоуровневое представление задач управления телекоммуникациями
22.2. Функциональные группы задач управления
Глава 23. Интегрированные информационные системы управления предприятиями электросвязи
23.1. Понятия и определения в области информационных систем управления предприятием
Глава 24. Управление услугами. Качество предоставляемых услуг
24.1. Система качества услуг электросвязи
24.2. Базовые составляющие обеспечения качества услуги
24.3. Оценка качества услуг связи с точки зрения пользователя и оператора связи
Глава 25. Управление услугами.
25.3. Централизованный способ построения системы расчетов
25.4. Интеграция аср с системами управления tmn
25.5. Основные технические требования для аср
25.6. Обзор автоматизированных систем расчетов
Глава 26. Управление сетями и сетевыми элементами
26.1. Архитектура систем управления сетями и сетевыми элементами
26.2. Системы управления первичными и вторичными сетями
26.3. Принципы построения системы управления
Глава 27. Решения компании strom telecom в области tmn (Foris oss)
27.1. Общая характеристика семейства продуктов Foris oss
27.2. Автоматизация расчетов. Подсистема TelBill
27.3. Многофункциональные подсистемы сбора данных и взаимодействия с атс
27.4. Подсистема сбора данных и их биллинговой предобработки TelCharge
27.5. Подсистемы TelRes, TelTe, TelRc
27.6. Система «Электронный замок»
27.7. Подсистема поддержки клиентов tccs (Foris Customer Care Systems)
По принципу чередования кодовых комбинаций можно объединить поток и с помощью мультиплексоров. В этом случае очередная «дверь» мультиплексора должна оставаться открытой до тех пор, пока не будет передана вся кодовая комбинация. Правда, аппаратуру придется сделать сложнее. Поскольку биты из каждого цифрового потока поступают на входы мультиплексора непрерывно, то в каждом канале потребуется устройство памяти (запоминающее устройство -ЗУ), в котором биты кодовой информации будут накапливаться и ждать, когда для них откроются «двери» мультиплексора. Итак, пока код буквы, т.е. группа 0 и 1, одного из потоков пропускается через мультиплексор в линию, коды букв других потоков записываются в свои ЗУ.
Давайте представим, что нам поручили спроектировать цифровую систему передачи речевых сообщений (например, телефонных) по одной линии связи, причем тип линии для нас сейчас не важен. Вспомнив, что речевое сообщение нужно сначала перекодировать в последовательность 0 и 1, подключим к выходу каждого телефонного аппарата АЦП (рис. 5.4).
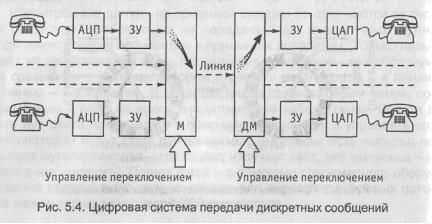
Разрядность АЦП, мы уже знаем, нужно выбрать равной 8. Для существования принципа чередования кодовых комбинаций осталось добавить в каждом канале ЗУ. Остальная часть многоканального передатчика нам хорошо знакома: это мультиплексор (М), счетчик (Сч) и генератор тактовых импульсов (ГТИ). Приемник многоканальной системы передачи отличается только тем, что вместо АЦП используются ЦАП (цифро-аналоговые преобразователи вместо мультиплексора - демультиплексор. Проект готов.
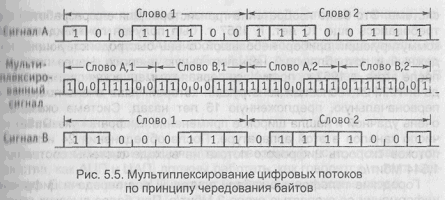
На рис. 5.5 показано мультиплексирование двух цифровых потоков по принципу чередования байтов.
Не кажется ли вам, что система получилась довольно сложной? каналов может быть не два и не четыре, а, скажем, 30. Между тем существует более простое решение. Оно уже было воплощено в первых разработках ИКМ-систем.
Замену непрерывного тока кодированной комбинацией импульсов назвали импульсно-кодовой модуляцией (ИКМ), поэтому цифровые системы передачи во всем мире называют еще системами передачи импульсно-кодовой модуляцией, или ИКМ-системами.
Разработка техники ИКМ началась в европейских странах, но разразившаяся в 1939 г. Вторая мировая война прервала этот процесс, центр научных исследований переместился в Америку. В 1947 г. ученые лабораторий фирмы «Bell» опубликовали первые сообщения о полностью работоспособной системе с ИКМ. Однако до широкого внедрения цифровых систем передачи оставалось еще около 15 лет. т задержка объяснялась тем, что не была готова соответствую-щая элементная база, в частности отсутствовал подходящий мало-мощный переключающий прибор. В то время в качестве переклю-чающих элементов могли использоваться электронные лампы, но они отличались большими габаритами, малой надежностью, большой по-требляемой мощностью. В результате аппаратура с ИКМ на основе технологии 1947 г. была громоздкой, ненадежной, сильно нагрева-лась. В действительности ключевое изобретение, изменившее данное положение, было сделано в тех же исследовательских лабораториях приблизительно в то же время, когда была создана первая ИКМ-система. Это было изобретение транзистора. Для его разработки потребовалось еще 10 лет. К 1957 г. был получен почти идеальный коммутирующий прибор: небольшой, очень быстродействующий, надежный и потребляющий незначительную энергию. Через пять лет после этого, в 1962 г., появилась первая коммерческая система передачи ИКМ-24, основная конструкция которой была очень похожа на первоначальную, предложенную 15 лет назад. Система оказалась очень удачной и нашла широкое применение. Цифра 24 указывает на число каналов в этой аппаратуре. После объединения 24 исходных потоков скорость цифрового потока на выходе системы составляла 1,544 Мбит/с.
Городские телефонные кабели пригодны для передачи цифровой информации со скоростью около 2 Мбит/с. При более высоких скоростях между парами кабеля возникают электромагнитные влияния. В американской системе возможности кабеля использованы не до конца. Поэтому в 1968 г. Франция вышла с предложением в международный комитет унифицировать ИКМ-системы на базе цифровой системы передачи ИКМ-30, содержащей 30 каналов и имеющей скорость объединенного потока 2,048 Мбит/с. Теперь возможности городских кабелей использовались полнее.
Вообразите, что выходы телефонных аппаратов подключены ко входам мультиплексора (рис. 5.6). Тогда в результате «открывания дверей» на выход мультиплексора будут поочередно проходить отсчеты непрерывной речи (точнее, непрерывного микрофонного тока). Теперь поставьте сразу же за мультиплексором АЦП - он будет превращать их в последовательность двоичных цифр, т.е. 0 и 1. Открыты первые «двери» - в линию «пошла» кодовая комбинация отсчета речи в первом канале, распахнулись вторые - в линии код отсчета второго канала. Когда будут переданы коды первых отсчетов всех каналов, наступит очередь вторых отсчетов, после них третьих и т.д.
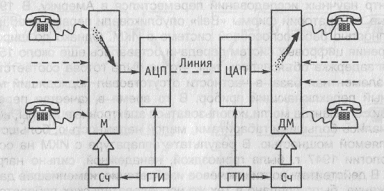
Рис. 5.6. Цифровая система передачи речевых сообщений
Таким образом, один АЦП обслуживает по очереди все каналы. На приемном конце используется общий ЦАП, а восстановленные отсче-ты распределяются по своим каналам. И не нужно иметь АЦП и ЦАП в каждом канале, не нужны и ЗУ. Система передачи стала простой.

5.2. Синхронизация
Тактовая синхронизация. Итак, совершенно ясно, что такие уст-ройства, как АЦП и ЦАП, должны работать, как говорится, в такт, син-хронно. Если, скажем, АЦП выдает 8-разрядные кодовые слова:
10011010 | 101011101 | 10010101 | 100011010...,
где каждый бит появляется через строго определенные интервалы времени - такты, то, чтобы ЦАП расшифровывал именно эти кодовые комбинации, он должен «выбирать» биты из последовательности точно через те же интервалы, в те же такты. Генераторы тактовых импульсов (ГТИ) имеются как на передающей, так и на приемной сторонах. Это они дают «указания», когда АЦП выдавать, в ЦАПу соответственно принимать очередной бит. Но как согласовать действия этих генераторов, если передающая и приемная станции разделены тысячами верст, а на работу генераторов влияют температура окружающего воздуха, его влажность, изменение напряжения питания и другие факторы. В результате интервалы между управляющими (тактовыми) импульсами на передающей и приемной станциях могут существенно отличаться друг от друга, и, следовательно, ЦАП декодирует совсем не ту последовательность, которая передана. К сожалению, искажение информации случается при очень небольших расхождениях длин тактовых интервалов так как с течением времени все равно наступит момент, когда ЦАП начнет «ошибаться» в выборе битов.
Несинхронность генераторов тактовых импульсов передающей и приемной станций скажется также и на том, что «двери» мультиплек-сора будут открываться не в такт друг с другом. Как в случае несовпа-дения скоростей вращения щеток в распределителях Бодо, информа-ция из одного канала передающей станции будет попадать совсем в другой канал приемной станции. Вывод из всего сказанного один: нуж-но синхронизировать работу генераторов передающей и приемной станций на каждом такте. Для этого достаточно знать на приемной стороне частоту следования тактовых импульсов, и управлять генерато-ром приемной станции так, чтобы он выдавал импульсы с той же час-тотой (такое же количество в секунду). И, конечно же, управление гене-ратором должно производиться автоматически, без участия человека.
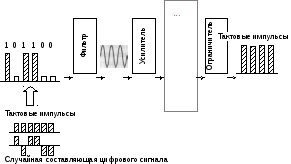
Рис. 5.7. Выделение тактовых импульсов из цифрового потока
Мы уже говорили о том, что цифровой поток можно представить в виде суммы двух последовательностей: регулярной и случайной (см. рис. 1.14), т.е. можно увидеть тактовые импульсы в явном виде. В спектре такого сигнала присутствуют основная и высшие гармоники тактовой частоты (см. рис. 1.15). Значит, с помощью электрического фильтра можно выделить из цифрового потока колебание тактовой частоты и затем сформировать из него тактовые импульсы (рис. 5.7).
Электрический фильтр подключают на приемной станции к линии связи параллельно с приемником, чтобы он не мешал цифровому потоку попадать в приемник и в то же время сам мог анализировать частотное «содержание» этого потока. Поскольку фильтр изготавливается заранее настроенным на частоту тактовых колебаний, он и выделяет из поступающего на его вход цифрового потока колебание именно данной частоты. Но колебание одной частоты - это всегда синусоидальное колебание. Однако с помощью специальных устройств - усилителя и ограничителя - из него легко «изготовить» колебания в виде последовательности тактовых импульсов. Они-то и будут управлять генератором приемной станции, заставляя его выдавать импульсы с точно таким же интервалом. Синхронизация по тактам действует!
Может возникнуть мысль отказаться от генератора на приемной станции, поскольку тактовые импульсы получены из цифрового потока. Однако это не разумно. Если по каким-либо причинам система синхронизации даст сбой и тактовые импульсы на какое-то время пропадут, то связь по всем каналам немедленно нарушится, что недопустимо. Наличие же генератора на приемной станции дает гарантию что нарушения связи не произойдет: пройдет достаточно много времени, прежде чем генератор выйдет из синхронизма, а за это вре-мя тактовые импульсы могут вновь появиться.
Сбой в синхронизации может произойти по многим причинам. Вот них. Глубокой ночью, когда большинство абонентов спит и, естественно, не пользуется услугами связи, в подавляющем боль-ниве каналов информация не передается, и в цифровом потоке появляются очень длинные последовательности нулей. Не исключено появление длинных последовательностей нулей в цифровом потоке и в любые другие часы.
Устранить эти «белые пятна» в цифровом потоке можно с помощью следующего приема. К двоичным символам цифрового потока прибавляется по правилам двоичной арифметики некоторая двоичная последовательность:
-
Цифровой поток 01110000000000000000011
-
Скремблер 10101010101010101010101
-
Поток в линии 11011010101010101010110
Как видите, в цифровом потоке исчезли длинные последовательности нулей. Теперь из него снова можно выделить тактовые импульсы. А чтобы вернуться к исходному потоку, перед тем как подать его в приемник, нужно снова сложить его по законам двоичной арифметики же двоичной последовательностью. Убедитесь в этом сами, без нашей помощи.
Подобная операция получила у специалистов название «скремблирование» (от английского слова scramble - перемешивать). Выпол-няется она довольно просто с помощью микросхем, «умеющих» скла-дывать, двоичные цифры по нужным правилам. Это так называемые сумматоры по модулю 2», они выпускаются промышленностью. цифровой поток, перед тем как отправить его в линию, подают на один из входов этого сумматора, на второй его вход поступает двоич-ная последовательность выбранной структуры. Результат суммиро-вания-«скремблированный» цифровой поток - направляется в ли-нию связи. Он уже не содержит длинных последовательностей нулей. Точно такой же сумматор есть и на приемной станции. Через него пропускаются» выходящий из линии цифровой поток и та же после-довательность, что и на передаче. Происходит «дескремблирова-ние . и восстановленный в первоначальном виде поток обрабатыва-ется приемником. Естественно, что для выделения тактовых импуль-сов используют цифровой поток, еще не подвергшийся процедуре восстановления.
Итак, синхронизация цифровой системы передачи на каждом такте ив работы осуществлена. Но этого недостаточно. Хотя теперь на приемной станции подключение линии к каналам и происходит в такт с передающей станцией, нужно еще знать, к какому конкретному каналу следует в данный момент подключить линию связи. Другими словами, речь идет о том, что приемная и передающая «электронные щетки» - мультиплексор и демультиплексор, как и в системе Бодо, должны начинать свое «вращение» с одного и того же положения, например с первого канала.
Как же решил эту проблему в своем изобретении Ж. Бодо? Он применил оригинальное и довольно простое устройство синхронизации. Если вы посмотрите внимательно на рис. 5.3, на котором изображена система Бодо с «чередованием кодовых комбинаций», то обратите внимание, что на распределителях кроме четырех ламелей (по пять сегментов в каждой), соединенных с четырьмя телеграфными аппаратами, есть еще совершенно отдельный, не связанный ни с одной ламелью, 21-й сегмент. На передающем распределителе к нему подключена батарея, а на приемном - электромагнит тормозного устройства. Мотор приемного распределителя вращается чуть быстрее, чем передающего. Теперь представим, что щетка на приемной станции находится в конце упомянутого нами 21-го сегмента. Пусть в это время из-за меньшей скорости работы мотора щетка на передающей станции только-только вступает на такой же сегмент. Заметьте, цепь электромагнита тормозного устройства замкнулась. В результате мотор приемного распределителя притормозился, и его щетка застыла на месте. Она останется неподвижной до тех пор, пока щетка передатчика не совершит весь свой путь по 21-му сегменту. Миг довольно краткий, но его хватает, чтобы выровнять положение щеток и начать их движение и на приеме, и на передаче с одной и той же позиции, а именно с самого первого в распределителях сегмента. Синхронность начала движения щеток (еще говорят: их синфазность) достигается в системе Бодо за счет притормаживания приемного распределителя и установки его тем самым в начальное положение. Если один оборот щеток считать за один цикл передачи информации от всех телеграфных аппаратов, то можно сказать, что каждый новый цикл щетки обоих распределителей начинают одновременно. Такой вид синхронизации уместно назвать синхронизацией по циклам.