ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 20.10.2024
Просмотров: 161
Скачиваний: 0

СОДЕРЖАНИЕ
Часть I. Способы передачи сообщений
1.1 Спектры периодических сигналов
1.2. Спектры непериодических сигналов
1.3. Сигналы электросвязи и их спектры
2.1. Принципы передачи сигналов электросвязи
3.1. Понятие о цифровых сигналах
3.2. Дискретизация аналоговых сигналов
3.3. Квантование и кодирование
3.4. Восстановление аналоговых сигналов
Глава 4. Принципы многоканальной передачи
4.1. Одновременная передача сообщений
4.2. Частотное разделение каналов
4.3. Временное разделение каналов
Глава 5. Цифровые системы передачи
5.1. Формирование группового сигнала
6.3. Регенерация цифровых сигналов
5.4. Помехоустойчивое кодирование
6.1. Плезиохронная цифровая иерархия
6.2. Синхронная цифровая иерархия
7.3. Волоконно-оптические кабельные линии
8.1. Предпосылки создания транспортных сетей
8.2. Системы передачи для транспортной сети
Vc низшего порядка (Low order vc, lovc)
Vc высшего порядка (High order vc, hovc)
8.3. Модели транспортных сетей
8.4. Элементы транспортной сети
8.5. Архитектура транспортных сетей
Часть II. Службы электросвязи. Телефонные службы и службы документальной электросвязи
Глава 9. Основные понятия и определения
9.1. Информация, сообщения, сигналы
9.2. Системы и сети электросвязи
9.3. Эталонная модель взаимосвязи открытых систем
9.4. Методы коммутации в сетях электросвязи
9.5 Методы маршрутизации в сетях электросвязи
Т а б л и ц а 9.2. Устройства, реализующие функции маршрутизации
10.1. Услуги, предоставляемые общегосударственной системой автоматизированной телефонной связи
10.3. Расчет коммутационного узла с коммутацией каналов 10.3.1. Модель коммутационного узла
10.3.1 Модель коммутационного узла
10.3.2. Структура коммутационных полей станций и узлов
10.3.3. Элементы теории телетрафика
11.2. Направления развития телеграфной связи
Глава 12. Службы пд. Защита от ошибок и преобразование сигналов
12.2. Сигналы и виды модуляции, используемые в современных модемах
13.1. Компьютеры — архитектура и возможности
13.2. Принципы построения компьютерных сетей
13.3. Международные стандарты на аппаратные и программные средства компьютерных сетей
13.4. Сетевые операционные системы
13.5. Локальные компьютерные сети
13.6. Глобальные компьютерные сети
13.7. Телефонная связь по компьютерным сетям
14.1. Основы факсимильной связи
14.2. Организация факсимильной связи
Глава 15. Другие службы документальной электросвязи
Глава 16. Единая система документальной электросвязи
16.1. Интеграция услуг документальной электросвязи [1]
16.2. Назначение и основные принципы построения служб обработки сообщений [2]
16.3. Многофункциональные терминалы
Глава 17. Обеспечение информационной безопасности в телекоммуникационных системах
17.2. Правовые и организационные аспекты информационной безопасности
17.3. Технические аспекты информационной безопасности
Часть III. Интеграция сетей и служб электросвязи
Глава 18. Узкополосные цифровые сети интегрального обслуживания (у-цсио)
18.1. Пути перехода к узкополосной цифровой сети интегрального обслуживания
18.2. Службы и услуги узкополосной цсио
18.3. Система управления у-цсио
Глава 19. Широкополосные и интеллектуальные сети
19.1. Условия и этапы перехода к широкополосной сети интегрального обслуживания (ш-цсио)
19.3. Способы коммутации в ш-цсио
19.4. Построение коммутационных полей станций ш-цсио
19.5. Причины и условия перехода к интеллектуальной сети (ис)
Глава 20. Система межстанционной сигнализации по общему каналу в цсио
20.1. Понятие об общем канале сигнализации
20.2. Протоколы системы сигнализации № 7 itu-t
20.3. Способы защиты от ошибок в окс № 7
20.5. Способы построения сигнальной сети
Глава 21. Широкополосные сети и оборудование компании «Huawei Technologies Co, Ltd»
21.1. Оптическая сеть абонентского доступа с интеграцией услуг honet
21.2. Построение транспортных сетей на базе оборудования компании «Huawei Technologies Co., Ltd»
21.3. Цифровая коммутационная система с программным управлением с&с08
21.4. Высокоскоростной коммутирующий маршрутизатор Radium 8750
Часть IV. Современные методы управления в телекоммуникациях
22.1. Многоуровневое представление задач управления телекоммуникациями
22.2. Функциональные группы задач управления
Глава 23. Интегрированные информационные системы управления предприятиями электросвязи
23.1. Понятия и определения в области информационных систем управления предприятием
Глава 24. Управление услугами. Качество предоставляемых услуг
24.1. Система качества услуг электросвязи
24.2. Базовые составляющие обеспечения качества услуги
24.3. Оценка качества услуг связи с точки зрения пользователя и оператора связи
Глава 25. Управление услугами.
25.3. Централизованный способ построения системы расчетов
25.4. Интеграция аср с системами управления tmn
25.5. Основные технические требования для аср
25.6. Обзор автоматизированных систем расчетов
Глава 26. Управление сетями и сетевыми элементами
26.1. Архитектура систем управления сетями и сетевыми элементами
26.2. Системы управления первичными и вторичными сетями
26.3. Принципы построения системы управления
Глава 27. Решения компании strom telecom в области tmn (Foris oss)
27.1. Общая характеристика семейства продуктов Foris oss
27.2. Автоматизация расчетов. Подсистема TelBill
27.3. Многофункциональные подсистемы сбора данных и взаимодействия с атс
27.4. Подсистема сбора данных и их биллинговой предобработки TelCharge
27.5. Подсистемы TelRes, TelTe, TelRc
27.6. Система «Электронный замок»
27.7. Подсистема поддержки клиентов tccs (Foris Customer Care Systems)
Применительно к середине XIX в. проблема формулировалась так: нужно было научиться передавать по одному проводу сразу несколько телеграмм.
Надо сказать, что данная проблема актуальна и по сей день. Возьмем, к примеру, современную спутниковую линию связи. Она позволяет организовать обмен информацией (а это могут быть либо речевое сообщение, либо сведения из банка данных, либо видеоизображение и т.д.) между двумя любыми точками нашей планеты. Но вряд ли кому придет в голову использовать линию для передачи информации только от одного пользователя к другому. Во-первых, это очень дорого. Во-вторых, это просто-напросто неэффективно: в линию «вложены» колоссальные средства, а предоставляется она каждый раз только двум пользователям. Гораздо выгоднее дать возможность как можно большему числу пользователей «арендовать» на время обмена информацией «космический мост» за вполне умеренную плату. Но поскольку каждый из них может выразить желание воспользоваться линией связи в удобное для него время и не захочет мириться с тем, что кто-то уже занял ее, решение проблемы может быть только таким: все абоненты должны пользоваться линией связи одновременно.
Цепи связи проводных кабельных линий и стволы радиолиний могут обеспечить передачу сигнала в широкой полосе частот: от десятков и сотен килогерц до десятков мегагерц в проводных системах и сотен и тысяч мегагерц в радиосистемах. Если сравнить эти цифры с шириной спектра первичных сигналов (см. табл. 1.1), то видно, что полоса частот, в которой работает та или иная линия передачи однока-нальной системы, используется крайне неэффективно.
Линия передачи большой протяженности представляет собой дорогое и громоздкое сооружение, требующее больших затрат сил, средств и времени на строительство. Для содержания линий в исправном состоянии также необходимы значительные силы и средства. Подавляющая часть капитальных затрат приходится на линейные сооружения и лишь незначительная часть - на аппаратуру. Естественно, возникает проблема наиболее эффективного использования линейных сооружений. Техническим решением этой экономической проблемы является одновременная передача по одной цепи большого числа первичных сигналов от разных источников сообщений т.е. создание на одной цепи большого количества независимых каналов.
Первые образцы многоканальной системы появились в России в 30-е годы XX в. В 1934 г. был налажен выпуск 3-канальной системы многократного телефонирования СМТ-34, которая выпускалась вплоть до Великой Отечественной войны. В 1940 г. была введена в опытную эксплуатацию первая в стране 12-канальная аппаратура для воздушных линий. В настоящее время существуют проводные и радиосистемы передачи, позволяющие организовать на одной цепи (и одном стволе) от десятков до тысяч каналов передачи.
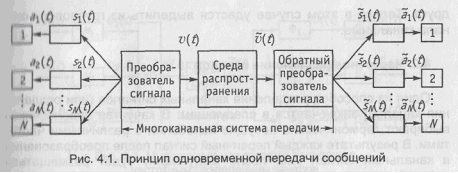
Рис.
4.1 иллюстрирует
принцип
одновременной
передачи
нес-кольких
сообщений
с
помощью
системы
передачи.
Сообщения
a1(t),
a2(t),
…, aN(t)
от
N
источников
преобразуются
на
передаче
в
первичные
сигналы
s1(t),
s2(t),
…, sN(t).
Последние
поступают
в
систему
передачи
на
преобразователь
сигналов,
где
подвергаются
специальной
обработке
и
объединяются
в
групповой
сигнал
v(t),
направляемый
в
цепь
связи.
В
приемной
части
системы
передачи
из
искаженного
помехой
группового
сигнала
![]() выделяются
индивидуальные
первичные
сигналы
отдельных
каналов
выделяются
индивидуальные
первичные
сигналы
отдельных
каналов
![]() .
В
приемных
первичных
преобразователях
эти
сигналы
преобразуются
в
сообщения
.
В
приемных
первичных
преобразователях
эти
сигналы
преобразуются
в
сообщения
![]() .
.
Ранее уже описывались методы передачи первичных сигналов: выбирается переносчик (гармоническое несущее колебание или последовательность узких импульсов), и его параметры модулируются первичным сигналом по амплитуде (AM или АИМ), частоте (ЧМ или ЧИМ), фазе (ФМ или ФИМ) и т.д.
Однако первичные сигналы s1(t), s2(t), …, sN(t) от N источников сообщений могут существовать одновременно и занимать одинаковые полосы частот (например, это могут быть сигналы речи, занимающие полосу частот 0,3...3,4 кГц). Необходимо, чтобы после преобразования на передаче сигналы отличались друг от друга. Только в этом случае удастся выделить из группового сигнала канальные.

4.2. Частотное разделение каналов
Один из способов разделения канальных сигналов (или разделения каналов) заключается в следующем. В качестве переносчиков выбирают гармонические несущие колебания с различными частотами. В результате каждый первичный сигнал после преобразования в канальный сигнал (т.е. после модуляции) будет размещаться в своей полосе частот. В качестве примера на рис. 4.2 показано преобразование N первичных сигналов, имеющих одинаковые спектры, путем модуляции по амплитуде (AM) несущих колебаний с различными частотами. Интервал между несущими частотами соседних каналов должен быть таким, чтобы полосы частот канальных сигналов не перекрывались.
На рис. 4.3 представлена структурная схема многоканальной системы передачи. Первичные сигналы s1(t), s2(t), …, sN(t) преобразуются устройствами М1 М2..... MN; модулированные несущие колебания v1(t), v2(t), …, vN(t), полученные на выходе этих устройств, называются канальными сигналами. В отличие от первичных сигналов, имеющих общий спектр, канальные разнесены по спектру (рис. 4.2). Групповой сигнал v(t) получается объединением канальных сигналов v1(t), v2(t), …, vN(t) в устройстве объединения (УО).


Рис. 4.3. Многоканальная система передачи с частотным разделением каналов
На
приемном конце канальные сигналы
выделяются из группового с помощью
разделительных частотных фильтров Ф1,
Ф2,
…, ФN,
пропускающих
сигналы
своего
канала
и
подавляющих
остальные.
Восстановление
первичных
сигналов
![]() из
канальных
из
канальных
![]() производится
с
помощью
демодуляторов
Д1,
…,ДN.
Системы
передачи,
в
которых
канальные
сигналы
размещаются
в неперекрывающихся
частотных
полосах,
получили
название
системы
передачи
с
частотным
разделением
каналов
(ЧРК).
производится
с
помощью
демодуляторов
Д1,
…,ДN.
Системы
передачи,
в
которых
канальные
сигналы
размещаются
в неперекрывающихся
частотных
полосах,
получили
название
системы
передачи
с
частотным
разделением
каналов
(ЧРК).
4.3. Временное разделение каналов
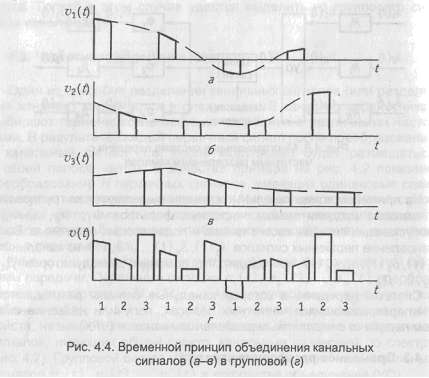
Пусть в качестве переносчика первичного сигнала s1(t) выбрана периодическая последовательность узких импульсов и осуществлена модуляция этой последовательности по амплитуде. Полученный в результате АИМ-сигнал - канальный сигнал v1(t) первого канала -показан на рис. 4.4, а. Выберем последовательность импульсов в качестве переносчика второго первичного сигнала s2(t) таким образом, чтобы импульсы АИМ-сигнала v2(t) второго канала передавались в те промежутки времени, когда цепь свободна от передачи импульсов первого канала (см. рис. 4.4, б). Канальные импульсы четьего (см. рис. 4.4, в) и других каналов также должны быть сдвинуты во времени относительно импульсов первых двух каналов и друг друга. Групповой сигнал v(t) получается после объединения канальных сигналов v1(t), v2(t), …, vN(t) (рис. 4.4, г).
Получить канальные АИМ-сигналы практически очень легко. Ропь АИМ-модуляторов могут выполнять электронные ключи (ЭК) (рис. 4.5), на которые нужно подать первичные сигналы. Ключи управляются импульсными переносчиками. Работа АИМ-модуляторов сводится к следующему: импульсы переносчиков поочередно открывают ключи, на выходах которых появляются первичные сигналы.
Нужно позаботиться лишь о том, чтобы последовательности импульсов, подаваемые на ключи ЭК, были сдвинуты во времени относительно друг друга (рис. 4.6). Эту задачу (см. рис. 4.5) выполняет распределитель импульсов каналов (РИК), управляемый генератором импульсов (ГИ). Таким образом, импульсы каждого канала, несущие в своей амплитуде информацию о первичном сигнале, передаются по цепи только в определенные промежутки времени. Разделение каналов на приеме (т.е. выделение канальных импульсов из группового сигнала) можно легко осуществить также с помощью ЭК, которые должны работать синхронно и синфазно с ключами передающей части. Другими словами, ключ каждого канала должен открываться тогда, когда по цепи приходят импульсы данного канала, и быть закрытым во время прихода импульсов других каналов. Это достигается с помощью управления ключами ЭК импульсными последовательностями (такими же, как и на передаче), вырабатываемыми в РИК приемной части и синхронизированными с импульсами передатчика с помощью схемы синхронизации СС (см. рис. 4.5). Канальные импульсы v1(t), v2(t), …, vN(t) с помощью УО объединяются в групповой сигнал v(t).
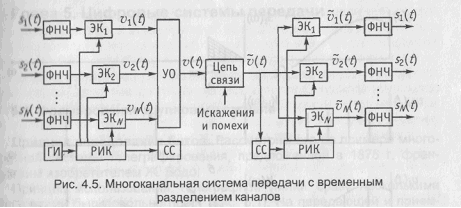
Итак, электронные ключи приемной части выполняют роль канальных селекторов.
Демодуляция
канальных
сигналов
(т.е.
выделение
из
них
первичных
сигналов)
заключается
в
восстановлении
непрерывных
сигналов
![]() по
дискретным
(импульсным)
значениям
по
дискретным
(импульсным)
значениям
![]() .
.
На рис. 4.7 показаны первичный сигнал, импульсный переносчик, канальный АИМ-сигнал i-го канала и их спектры. Спектр канального ЛИМ-сигнала содержит спектр исходного первичного сигнала si(t). Значит, первичный сигнал легко выделить с помощью фильтра нижних частот (ФНЧ). Такие фильтры включаются в каждый канал и выполняют роль демодуляторов (см. рис. 4.5). Из рис. 4.7 видно, что частота сле-дования импульсных последовательностей - переносчиков - должна быть не ниже удвоенной максимальной частоты спектра первичного сигнала, т.е. fД > 2Fmax, иначе невозможно будет выделить с помощью фильтра первичный сигнал. Например, этот же результат вытекает и из теоремы В.А. Котельникова, в соот-ветствии с которой частоту следования импульсов необходимо выбирать не меньше удвоенной граничной частоты Fmax спектра сигнала s(t). Чтобы спектр передаваемых сигналов si(t) был ограничен, в каждом канале на передаче ставят фильтры нижних частот.
О писанные
системы
передачи
(см.
рис.
4.5), в
которых
канальные
сигналы
передаются
по
цепи
в
неперекрывающиеся
промежутки
време
ни,
называются
системами
передачи
с
временном
разделением
каналов
(ВРК).
писанные
системы
передачи
(см.
рис.
4.5), в
которых
канальные
сигналы
передаются
по
цепи
в
неперекрывающиеся
промежутки
време
ни,
называются
системами
передачи
с
временном
разделением
каналов
(ВРК).
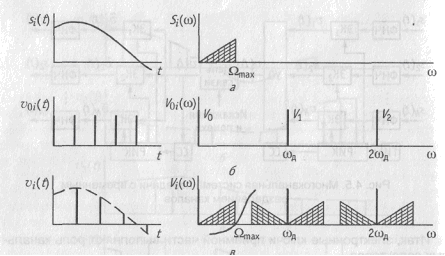
Рис. 4.7. Сигналы i-го канала (слева) и их спектры (справа) а - первичный, б- импульсный переносчик, в - канальный АИМ-сигнал
Контрольные вопросы
1. В чем состоит принцип частотного разделения каналов?
2. Зачем используются фильтры в системах передачи с ЧРК?
3. В чем состоит принцип временного разделения каналов?
4. С помощью каких устройств выделяются исходные сигналы на приемной стороне в системе передачи с ВРК?