ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 20.10.2024
Просмотров: 201
Скачиваний: 0

СОДЕРЖАНИЕ
Часть I. Способы передачи сообщений
1.1 Спектры периодических сигналов
1.2. Спектры непериодических сигналов
1.3. Сигналы электросвязи и их спектры
2.1. Принципы передачи сигналов электросвязи
3.1. Понятие о цифровых сигналах
3.2. Дискретизация аналоговых сигналов
3.3. Квантование и кодирование
3.4. Восстановление аналоговых сигналов
Глава 4. Принципы многоканальной передачи
4.1. Одновременная передача сообщений
4.2. Частотное разделение каналов
4.3. Временное разделение каналов
Глава 5. Цифровые системы передачи
5.1. Формирование группового сигнала
6.3. Регенерация цифровых сигналов
5.4. Помехоустойчивое кодирование
6.1. Плезиохронная цифровая иерархия
6.2. Синхронная цифровая иерархия
7.3. Волоконно-оптические кабельные линии
8.1. Предпосылки создания транспортных сетей
8.2. Системы передачи для транспортной сети
Vc низшего порядка (Low order vc, lovc)
Vc высшего порядка (High order vc, hovc)
8.3. Модели транспортных сетей
8.4. Элементы транспортной сети
8.5. Архитектура транспортных сетей
Часть II. Службы электросвязи. Телефонные службы и службы документальной электросвязи
Глава 9. Основные понятия и определения
9.1. Информация, сообщения, сигналы
9.2. Системы и сети электросвязи
9.3. Эталонная модель взаимосвязи открытых систем
9.4. Методы коммутации в сетях электросвязи
9.5 Методы маршрутизации в сетях электросвязи
Т а б л и ц а 9.2. Устройства, реализующие функции маршрутизации
10.1. Услуги, предоставляемые общегосударственной системой автоматизированной телефонной связи
10.3. Расчет коммутационного узла с коммутацией каналов 10.3.1. Модель коммутационного узла
10.3.1 Модель коммутационного узла
10.3.2. Структура коммутационных полей станций и узлов
10.3.3. Элементы теории телетрафика
11.2. Направления развития телеграфной связи
Глава 12. Службы пд. Защита от ошибок и преобразование сигналов
12.2. Сигналы и виды модуляции, используемые в современных модемах
13.1. Компьютеры — архитектура и возможности
13.2. Принципы построения компьютерных сетей
13.3. Международные стандарты на аппаратные и программные средства компьютерных сетей
13.4. Сетевые операционные системы
13.5. Локальные компьютерные сети
13.6. Глобальные компьютерные сети
13.7. Телефонная связь по компьютерным сетям
14.1. Основы факсимильной связи
14.2. Организация факсимильной связи
Глава 15. Другие службы документальной электросвязи
Глава 16. Единая система документальной электросвязи
16.1. Интеграция услуг документальной электросвязи [1]
16.2. Назначение и основные принципы построения служб обработки сообщений [2]
16.3. Многофункциональные терминалы
Глава 17. Обеспечение информационной безопасности в телекоммуникационных системах
17.2. Правовые и организационные аспекты информационной безопасности
17.3. Технические аспекты информационной безопасности
Часть III. Интеграция сетей и служб электросвязи
Глава 18. Узкополосные цифровые сети интегрального обслуживания (у-цсио)
18.1. Пути перехода к узкополосной цифровой сети интегрального обслуживания
18.2. Службы и услуги узкополосной цсио
18.3. Система управления у-цсио
Глава 19. Широкополосные и интеллектуальные сети
19.1. Условия и этапы перехода к широкополосной сети интегрального обслуживания (ш-цсио)
19.3. Способы коммутации в ш-цсио
19.4. Построение коммутационных полей станций ш-цсио
19.5. Причины и условия перехода к интеллектуальной сети (ис)
Глава 20. Система межстанционной сигнализации по общему каналу в цсио
20.1. Понятие об общем канале сигнализации
20.2. Протоколы системы сигнализации № 7 itu-t
20.3. Способы защиты от ошибок в окс № 7
20.5. Способы построения сигнальной сети
Глава 21. Широкополосные сети и оборудование компании «Huawei Technologies Co, Ltd»
21.1. Оптическая сеть абонентского доступа с интеграцией услуг honet
21.2. Построение транспортных сетей на базе оборудования компании «Huawei Technologies Co., Ltd»
21.3. Цифровая коммутационная система с программным управлением с&с08
21.4. Высокоскоростной коммутирующий маршрутизатор Radium 8750
Часть IV. Современные методы управления в телекоммуникациях
22.1. Многоуровневое представление задач управления телекоммуникациями
22.2. Функциональные группы задач управления
Глава 23. Интегрированные информационные системы управления предприятиями электросвязи
23.1. Понятия и определения в области информационных систем управления предприятием
Глава 24. Управление услугами. Качество предоставляемых услуг
24.1. Система качества услуг электросвязи
24.2. Базовые составляющие обеспечения качества услуги
24.3. Оценка качества услуг связи с точки зрения пользователя и оператора связи
Глава 25. Управление услугами.
25.3. Централизованный способ построения системы расчетов
25.4. Интеграция аср с системами управления tmn
25.5. Основные технические требования для аср
25.6. Обзор автоматизированных систем расчетов
Глава 26. Управление сетями и сетевыми элементами
26.1. Архитектура систем управления сетями и сетевыми элементами
26.2. Системы управления первичными и вторичными сетями
26.3. Принципы построения системы управления
Глава 27. Решения компании strom telecom в области tmn (Foris oss)
27.1. Общая характеристика семейства продуктов Foris oss
27.2. Автоматизация расчетов. Подсистема TelBill
27.3. Многофункциональные подсистемы сбора данных и взаимодействия с атс
27.4. Подсистема сбора данных и их биллинговой предобработки TelCharge
27.5. Подсистемы TelRes, TelTe, TelRc
27.6. Система «Электронный замок»
27.7. Подсистема поддержки клиентов tccs (Foris Customer Care Systems)
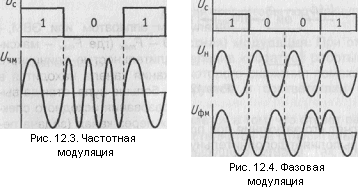
В качестве другого примера использования ЧМ можно привести рекомен-дацию МСЭ V.23. Модем должен обес-печивать работу со скоростью 600 или 1200 Бод. Скорости модуляции и ско-рости передачи информации здесь, как и в случае V.21, совпадают. При пере-даче со скоростью 1200 бит/с средняя частота 1700Гц, а девиация частоты ±400 Гц. При передаче со скоростью 600 бит/с используется средняя часто-та 1500 Гц и девиация частоты ±200 Гц. Наряду с каналом передачи данных предусмотрен вспомогательный (об-ратный) канал для передачи сигналов подтверждения о качестве приема со скоростью 75 бит/с.
Модемы, работающие со скоростью 300 и 600/1200 Бод, самые дешевые. Однако сегодня такая скорость передачи уже никого не уст-раивает. При малой скорости передачи долго придется передавать большие файлы, а, следовательно, экономия на покупке модема обернется большими затратами на оплату времени занятия канала. Поэтому модемы на скорость 300 Бод (или даже 600/1200 Бод) сейчас уже никто не покупает.
Фазовая модуляция. Если при частотной модуляции информация о виде передаваемого сигнала (0 или 1) заложена в значении частоты несущей, то при фазовой модуляции информационным параметром является фаза передаваемого сигнала (рис. 12.4 и табл. 12.3).
Упрощенная схема дискретного канала с ФМ приведена на рис. 12.5. Процесс модуляции осуществляется в фазовом модуляторе ФМ.
Полосовой фильтр ПФпер ограничивает спектр сигнала, выдаваемого в канал связи (непрерывный канал). Ограничение спектра передаваемых частот с помощью ПФпер уменьшает взаимное влияние каналов в многоканальной аппаратуре с частотным разделением каналов.
Полосовой фильтр приема ПФпр выделяет полосу частот, в которой должен располагаться полезный сигнал, что позволяет избавиться от помех, находящихся вне полосы пропускания ПФпр. Далее сигнал усиливается усилителем. Последний компенсирует потерю энергии сигнала за счет его затухания при прохождении через канал.
Таблица 12.3. Правило формирования ФМ-сигнала
|
Символ |
|
|
1 |
0° |
|
0 |
180° |
Примечание. Отсчет фазы Uфм осуществляется относительно фазы несущей.

Рис. 12.5. Дискретный канал с ФМ
Обычно усилитель выполняет дополнительную функцию - функцию ограничения сигнала по уровню (УО). При этом удается обеспечить постоянство уровня сигнала на входе фазового демодулятора (ФД) при изменении уровня сигнала на входе приемника в довольно широких пределах. В фазовом демодуляторе ФД принимаемый фазомодулированный сигнал сравнивается по фазе с эталонным сигналом, который называют обычно опорным. Последний должен совпадать как по частоте, так и по фазе с несущей на передаче. Если принимаемый сигнал Uфм(t) на единичном интервале совпадает по фазе с опорным, то выносится решение о том, что передавалась 1. Если же фазы принятого и опорного сигнала отличаются на 180°, то делаем вывод о том, что передавался 0.
Одна из основных проблем при демодуляции ФМ-сигнала - проблема получения опорного напряжения. В качестве опорного напряжения можно использовать: напряжение высокостабильного местного генератора (см. рис. 12.5); пилот-сигнал, передаваемый от передатчика по специальному узкополосному каналу; напряжение, выделяемое из принимаемого рабочего сигнала Uфм (t).
Даже при выборе достаточно стабильного местного генератора его частота будет отличаться от частоты несущей, что приведет к накапливанию расхождения по фазе несущей и опорного напряжения. Если расхождение по фазе несущей и опорного напряжения достигнет 180°, то все элементы принимаются «наоборот» (0 вместо 1 и 1 вместо 0), или, как говорят, появится «обратная работа». Не останавливаясь далее на остальных методах получения опорного напряжения, которые более подробно рассмотрены в работе [5] (см. гл. 10), заметим, что возможность «обратной работы» - это недостаток не конкретного способа получения опорного напряжения, а фазовой модуляции или, как ее иначе называют, абсолютной фазовой модуляции для того, чтобы подчеркнуть ее отличие от относительной фазовой модуляции.
Таблица 12.4. Правило формирования ОФМ-сигнала
|
Символ |
|
|
1 |
0° |
|
0 |
180° |

Примечание.
Отсчет фазы (![]() )
передаваемого сигнала осуществляется
относительно предыдущего сигнала.
)
передаваемого сигнала осуществляется
относительно предыдущего сигнала.
Относительная фазовая (фазоразностная) модуляция. При относительной фазовой модуляции (ОФМ) явление «обратной работы» отсутствует, но достигается это ценой некоторого снижения помехоустойчивости. При ОФМ сигнал формируется в соответствии с табл. 12.4.
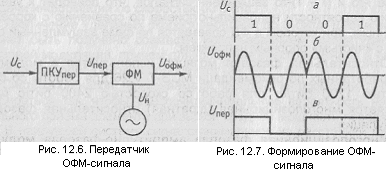
Отличие табл. 12.4 от табл. 12.3 заключается в том, что отсчет передаваемого сигнала (Дф) при ОФМ осуществляется не относительно фазы несущей, а относительно фазы предыдущего сигнала. Так, при передаче элемента 0 передаваемый сигнал должен иметь сдвиг относительно предыдущего на 180° (рис. 12.6). Так как для первого единичного элемента нет предыдущего, то фаза соответствующего ему сигнала Uфм(t) может быть произвольной. Прием начнем со второго элемента, для которого опорным является первый.
Чаще всего в качестве фазового модулятора при ОФМ используется такое же устройство, как и при абсолютной фазовой модуляции. Тогда для получения на выходе модулятора сигнала вида, изображенного на рис. 12.7, б, исходный сигнал, прежде чем подать его на модулятор, необходимо перекодировать (см. рис. 12.7, в). Временные диаграммы, иллюстрирующие процесс получения ОФМ-сигнала, представлены на рис. 12.7.
Информация о виде переданного единичного элемента заключена в разности фаз i-го и (i - 1)-го ОФМ-сигнала. Следовательно, извлечь эту информацию можно, сравнивая фазу i-го и (i - 1)-го ОФМ-сигнала в фазовом демодуляторе (рис. 12.8). Для задержки сигнала на время, равное длительности единичного интервала, применяется элемент памяти ЭП. Схема, представленная на рис. 12.8, осуществляет автокорреляционный (некогерентный) прием. Иногда такой метод приема называют «методом сравнения фаз». Скачок фазы опорного напряжения на 180° вызовет одиночную ошибку, а не поток ошибок, как при абсолютной фазовой модуляции.
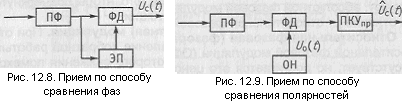
Если для приема использовать фазовый демодулятор, на кото-рый подается когерентное опорное напряжение, то после решающе-го устройства будем иметь сигнал, совпадающий (при отсутствии ошибок) с перекодированным на передаче. Такой сигнал нуждается в обратном перекодировании. Структурная схема такого приемника изображена на рис. 12.9. Здесь осуществляется корреляционный (когерентный) прием, называемый иногда «методом сравнения по-лярностей». Сравнение полярностей осуществляется в перекоди-рующем устройстве приема ПКУпр. Если полярности (i - 1)-го и i-го элементов совпадают, то на выходе ПКУпр в качестве i-го элемента выдается 1. Если полярности (i - 1)-го и i-го элементов разные, то на выходе ПКУПр выдается 0.
Очевидно, что i-й элемент на выходе ПКУпр будет воспроизведен неправильно, если на его входе исказился (i - 1)-й или i-и элемент. Вероятность появления неправильного элемента на входе ПКУпр рош = pфм, так как тогда вероятность неправильного приема
рофм = 2рош(1-рош) ≥ рфм. (12.4)
Обычно рош ≤ 10-3 , тогда рофм ≈ 2рфм.
При автокорреляционном приеме в ФД происходит сравнение по фазе i-го и (i - 1)-го зашумленных сигналов, что приводит к увели-чению вероятности неправильного приема по сравнению с корреля-ционным, при котором в ФД сравнивается по фазе зашумленный сиг-нал с «чистым» опорным напряжением.
Относительная фазовая модуляция используется в модемах, разработанных по рекомендациям МСЭ-Т V.26 для работы со ско-ростью 1200 бит/с; для работы со скоростью 2400 бит/с при-меняется многопозиционная (двукратная) относительная фазовая модуляция.
Многопозиционная фазовая и амплитудно-фазовая модуляция. Последний вид модуляции называют еще квадратурной ампли-тудной модуляцией (QAM - Quadrature Amplitude Modulation).
Таблица 12.5. Правило формирования ДФМ-сигнала
|
Комбинация |
00 |
01 |
11 |
10 |
|
ДФ° |
45 |
135 |
225 |
315 |
Известно, что если сообщение передается двоичными посылками (двоичным кодом), то скорость передачи информации не может пре-вышать 2ΔFk бит/с, или 2 бит/с на 1 Гц полосы пропускания канала. Для повышения удельной скорости передачи информации необходи-мо перейти к многократной модуляции (многопозиционным кодам), при которой каждая элементарная посылка несет более 1 бита информации.
Наибольшее применение многократные методы нашли при фазо-вой модуляции. Здесь каждой комбинации из п единичных двоичных элементов, поступивших от источника, ставится в соответствие опре-деленное значение фазы отрезка несущей. Правило отображения двоичной последовательности {аi} в последовательность сигналов {si,k(t)} называется модуляционным кодом. Так, при двукратной фа-зовой модуляции (ДФМ) передаваемая последовательность разбива-ется на комбинации из двух элементов. Очевидно, что число различных комбинаций длины т равно 2m. Для ДФМ 2m = 4. Передача информации осуществляется дибитами в соответствии с модуляцион-ным кодом (табл. 12.5).
Применительно к двукратной относительной фазовой модуляции (ДОФМ) Δφ соответствует сдвигу фаз между i-м и (i - 1)-м сигналами. На приеме в зависимости от сдвига Δφ в соответствии с табл. 12.5 выдается одна из комбинаций. При одной и той же скорости модуляции ДОФМ позволяет обеспечить вдвое большую скорость передачи информации, чем ОФМ. Но так как при ДОФМ минимальный сдвиг по фазе между сигналами 90, а не 180°, как при ОФМ, вероятность ошибки при ДОФМ выше. Двукратная относительная фазовая моду-ляция в соответствии с рекомендациями МСЭ-Т применяется для пе-редачи информации со скоростью 2400 бит/с.
Увеличение удельных скоростей передачи до 3 бит/(Гц • с) и выше может быть получено совместным использованием амплитудной и фазовой модуляций, причем для сокращения спектра сигнала в канал передается одна боковая полоса частот [2].
Система сигналов, применяемая при передаче информации, должна выбираться так, чтобы обеспечить минимальную вероятность непра-вильного приема элемента при заданной средней мощности передатчи-ка. В наилучшей системе сигналов минимальное из расстояний между парами сигналов должно быть максимальным.
На практике при т = 16 во многих УПС применяется так называ-мая квадратурная амплитудная модуляция КАМ-16 (рис. 12.10). Проигрыш в помехоустойчивости при КАМ по сравнению с оптимальной системой сигналов составляет приблизительно 0,5 дБ.
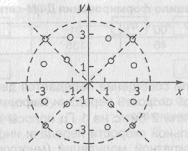
Рис. 12.10. Сигналы квадратурной амплитудной модуляции КАМ-16
Отметим, что изменение свойств помехи приводит к изменению структуры оптимальных систем сигналов. Для каналов, в которых имеются фазовые флуктуации (дрожание фазы), следует выбирать сигналы, существенно разнесенные по углу. Такая система сигналов представлена на рис. 12.11. Она отвечает рекомендации МСЭ-Т V.29 и обеспечивает минимальный угол между векторами 45°, что более чем в 2 раза превышает аналогичный показатель системы КАМ-16.
Следует отметить, что достижение высокой удельной скорости возможно только в том случае, если УПС являются адаптивными. Это связано с непостоянством параметров канала связи по времени, а также нестационарным характером действующих в нем мультиплика-тивных и аддитивных помех. Для адаптации в состав УПС включают-ся блоки идентификации параметров канала и помех, оценки которых используются для изменения параметров и структуры блоков форми-рования и обработки сигналов.