ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 20.10.2024
Просмотров: 179
Скачиваний: 0

СОДЕРЖАНИЕ
Часть I. Способы передачи сообщений
1.1 Спектры периодических сигналов
1.2. Спектры непериодических сигналов
1.3. Сигналы электросвязи и их спектры
2.1. Принципы передачи сигналов электросвязи
3.1. Понятие о цифровых сигналах
3.2. Дискретизация аналоговых сигналов
3.3. Квантование и кодирование
3.4. Восстановление аналоговых сигналов
Глава 4. Принципы многоканальной передачи
4.1. Одновременная передача сообщений
4.2. Частотное разделение каналов
4.3. Временное разделение каналов
Глава 5. Цифровые системы передачи
5.1. Формирование группового сигнала
6.3. Регенерация цифровых сигналов
5.4. Помехоустойчивое кодирование
6.1. Плезиохронная цифровая иерархия
6.2. Синхронная цифровая иерархия
7.3. Волоконно-оптические кабельные линии
8.1. Предпосылки создания транспортных сетей
8.2. Системы передачи для транспортной сети
Vc низшего порядка (Low order vc, lovc)
Vc высшего порядка (High order vc, hovc)
8.3. Модели транспортных сетей
8.4. Элементы транспортной сети
8.5. Архитектура транспортных сетей
Часть II. Службы электросвязи. Телефонные службы и службы документальной электросвязи
Глава 9. Основные понятия и определения
9.1. Информация, сообщения, сигналы
9.2. Системы и сети электросвязи
9.3. Эталонная модель взаимосвязи открытых систем
9.4. Методы коммутации в сетях электросвязи
9.5 Методы маршрутизации в сетях электросвязи
Т а б л и ц а 9.2. Устройства, реализующие функции маршрутизации
10.1. Услуги, предоставляемые общегосударственной системой автоматизированной телефонной связи
10.3. Расчет коммутационного узла с коммутацией каналов 10.3.1. Модель коммутационного узла
10.3.1 Модель коммутационного узла
10.3.2. Структура коммутационных полей станций и узлов
10.3.3. Элементы теории телетрафика
11.2. Направления развития телеграфной связи
Глава 12. Службы пд. Защита от ошибок и преобразование сигналов
12.2. Сигналы и виды модуляции, используемые в современных модемах
13.1. Компьютеры — архитектура и возможности
13.2. Принципы построения компьютерных сетей
13.3. Международные стандарты на аппаратные и программные средства компьютерных сетей
13.4. Сетевые операционные системы
13.5. Локальные компьютерные сети
13.6. Глобальные компьютерные сети
13.7. Телефонная связь по компьютерным сетям
14.1. Основы факсимильной связи
14.2. Организация факсимильной связи
Глава 15. Другие службы документальной электросвязи
Глава 16. Единая система документальной электросвязи
16.1. Интеграция услуг документальной электросвязи [1]
16.2. Назначение и основные принципы построения служб обработки сообщений [2]
16.3. Многофункциональные терминалы
Глава 17. Обеспечение информационной безопасности в телекоммуникационных системах
17.2. Правовые и организационные аспекты информационной безопасности
17.3. Технические аспекты информационной безопасности
Часть III. Интеграция сетей и служб электросвязи
Глава 18. Узкополосные цифровые сети интегрального обслуживания (у-цсио)
18.1. Пути перехода к узкополосной цифровой сети интегрального обслуживания
18.2. Службы и услуги узкополосной цсио
18.3. Система управления у-цсио
Глава 19. Широкополосные и интеллектуальные сети
19.1. Условия и этапы перехода к широкополосной сети интегрального обслуживания (ш-цсио)
19.3. Способы коммутации в ш-цсио
19.4. Построение коммутационных полей станций ш-цсио
19.5. Причины и условия перехода к интеллектуальной сети (ис)
Глава 20. Система межстанционной сигнализации по общему каналу в цсио
20.1. Понятие об общем канале сигнализации
20.2. Протоколы системы сигнализации № 7 itu-t
20.3. Способы защиты от ошибок в окс № 7
20.5. Способы построения сигнальной сети
Глава 21. Широкополосные сети и оборудование компании «Huawei Technologies Co, Ltd»
21.1. Оптическая сеть абонентского доступа с интеграцией услуг honet
21.2. Построение транспортных сетей на базе оборудования компании «Huawei Technologies Co., Ltd»
21.3. Цифровая коммутационная система с программным управлением с&с08
21.4. Высокоскоростной коммутирующий маршрутизатор Radium 8750
Часть IV. Современные методы управления в телекоммуникациях
22.1. Многоуровневое представление задач управления телекоммуникациями
22.2. Функциональные группы задач управления
Глава 23. Интегрированные информационные системы управления предприятиями электросвязи
23.1. Понятия и определения в области информационных систем управления предприятием
Глава 24. Управление услугами. Качество предоставляемых услуг
24.1. Система качества услуг электросвязи
24.2. Базовые составляющие обеспечения качества услуги
24.3. Оценка качества услуг связи с точки зрения пользователя и оператора связи
Глава 25. Управление услугами.
25.3. Централизованный способ построения системы расчетов
25.4. Интеграция аср с системами управления tmn
25.5. Основные технические требования для аср
25.6. Обзор автоматизированных систем расчетов
Глава 26. Управление сетями и сетевыми элементами
26.1. Архитектура систем управления сетями и сетевыми элементами
26.2. Системы управления первичными и вторичными сетями
26.3. Принципы построения системы управления
Глава 27. Решения компании strom telecom в области tmn (Foris oss)
27.1. Общая характеристика семейства продуктов Foris oss
27.2. Автоматизация расчетов. Подсистема TelBill
27.3. Многофункциональные подсистемы сбора данных и взаимодействия с атс
27.4. Подсистема сбора данных и их биллинговой предобработки TelCharge
27.5. Подсистемы TelRes, TelTe, TelRc
27.6. Система «Электронный замок»
27.7. Подсистема поддержки клиентов tccs (Foris Customer Care Systems)
3.3. Квантование и кодирование
Квантование. Пусть в результате дискретизации непрерывного сигнала s(t) была получена последовательность узких импульсов, которая представляет собой АИМ-сигнал. Амплитуды импульсов равны в этом случае мгновенным значениям сигнала s(t) в моменты i x tд, где i = 0, 1, 2, 3, ...; tД - период следования импульсов, или интервал дискретизации.
Подвергнем полученный АИМ-сигнал квантованию по уровню (рис. 3.5). Для этого диапазон возможных значений амплитуд (т.е. диапазон значений первичного сигнала) делится на отрезки, называемые шагами квантования А,. Границы этих отрезков являются разрешенными для передачи значений амплитуд импульсов. Таким образом, амплитуды передаваемых импульсов будут равны не мгновенным значениям первичного сигнала, а ближайшим разрешенным уровням. Такое преобразование первичных сигналов можно называть квантованной амплитудно-импульсной модуляцией (КАИМ). Особенностью КАИМ-сигнала является то, что все его уровни можно пронумеровать (а их число хотя и большое, но конечное) и тем самым све-передачу КАИМ-сигнала к передаче последовательностей номеров уровней, которые этот сигнал принимает в моменты i x tД.
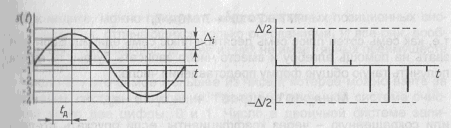
Рис. 3.5. Квантование АИМ-сигнала по уровню Рис. 3.6. Шум квантования
Если шаги квантования одинаковы и не зависят от уровня квантования, то квантование называют равномерным. Возможно неравномерное квантование, при котором шаги квантования различны. В процессе квантования возникает ошибка вследствие того, что передаваемый квантованный сигнал отличается от истинного. Эту ошибку можно рассматривать как специфическую помеху - шум квантования. Последний представляет собой случайную последовательность импульсов (рис. 3.6), максимальное значение амплитуды кото-не превышает половины шага квантования. Чем меньше шаг квантования, тем меньше шум, но больше число передаваемых раз-брошенных уровней.
Следующий шаг в преобразовании сигнала состоит в переводе квантованного АИМ-сигнала в цифровой. Эта операция называется кодированием КАИМ-сигнала.
Кодирование. Познакомимся с одним замечательным свойством а системы счисления - позиционностью. Изобразим какое-нибудь число, например 777. В нем один и тот же знак «7» участвует 3 раза, но когда он стоит справа, то означает семь единиц, в центре - семь десятков, слева - семь сотен. Таким образом, при записи числа цифра может иметь начертание одно и то же, а цифровые значения - разные, в зависимости от места, позиции, разряда, на котором она стоит. Такой принцип построения чисел называется поместным, или позиционным. Для записи любых сколь угодно больших чисел достаточно десяти цифр!
Каждая позиция, или разряд, числа имеет определенный «вес» (единицы, десятки, сотни и т.д.), поэтому число 777 можно расписать как
777 = 7 x 102 + 7 x 10 +7,
т.е. как семь сотен плюс семь десятков плюс семь единиц. Если призвать на помощь алгебру и вместо чисел записать буквы, то можно получить такую общую форму представления числа:
M = an x 10n + an-1 x 10n-1 +…+ a1 x 10 + a0 ,
или сокращенную - через коэффициенты, если опускать степени числа 10:
M = (anan-1…a1a0).
Число 10 является основанием системы счисления. Коэффициенты а0 (число единиц), а1 число единиц второго разряда, т.е. десятков), а2 (число единиц третьего разряда, т.е. сотен) и т.д. могут принимать значения, не превышающие основания системы: от 0 до 9. В 1665 г. французский математик Б. Паскаль показал, что за основание системы счисления можно принять любое число, а это значит, что каждое число можно представить в виде комбинации степеней не числа 10, какого-либо другого целого числа. Выберем, например, число 7:
M = an x 7n + an-1 x 7n-1 + a1 x 7 + a0 .
Ясно, что значения коэффициентов а0,а1,...,аn должны теперь быть не больше нового основания, т.е. 7: они могут принимать значения от 0 до 6.
Представим число 777 в семеричной системе, разлагая его по степеням основания 7:
(777)10 = 2 x 73 + 1 x 72 + 6 x 7.
Если опустить степени числа 7, как мы делаем при записи чисел в десятичной системе, то получим семеричную запись этого числа: (2160)7. Здесь цифра 7 в индексе указывает основание системы. В пятеричной позиционной системе всего пять цифр: 0, 1,2, 3, 4. В ней число 777 будет представляться количеством «пятерок», «двадцати-пяток» и т.д.:
(777)10 = 1 x 54 + 1 x 53 + 1 x 52 + 0 x 5 + 2 = (111052)5 .
Посмотрим, как будет представлено число 777 в двенадцатеричной системе. Поскольку в ней должно быть двенадцать цифр, а мы знаем только десять, то придется ввести еще две цифры, обозначив 10, скажем, буквой А, а 11 - буквой В. В результате получим

(777)10 = 5 x 122 + 4 x 12 + 9 = (549)12 .
Как видите, можно придумать много различных позиционных сис-м>м счисления, отличающихся только основаниями. И все они, вообще говоря, равнозначны: ни одна из них не имеет явных преимуществ перед другой!
Число 2 - это самое меньшее из чисел, которое можно взять за основание системы счисления. Поэтому в двоичной системе счисления всего две цифры: 0 и 1. Число в двоичной системе запишется так:
M = an x 2n + an-1 x 2n-1 + …+ a1 x 2 + a0 .
Если в десятичной системе «вес» каждой позиции (или разряда) Ml на равен числу 10 в некоторой степени, то в двоичной системе нмисто числа 10 используют число 2. «Веса» первых 13 позиций Ч'.прядов) двоичного числа имеют следующие значения:
|
212 |
211 |
210 |
29 |
28 |
27 |
26 |
25 |
24 |
23 |
22 |
21 |
20 |
|
4096 |
2048 |
1024 |
512 |
256 |
128 |
64 |
32 |
16 |
8 |
4 |
2 |
1 |
Попробуем записать уже привычное нам число (777)10 в двоичной истоме счисления, представляя его в виде разложения по степеням шпики и отбрасывая потом при записи сами степени:
(777)10 = 1 x 29 + 1 x 28 + 0 x 27 + 0 x 26 + 0 x 25 + 0 x 24 + 1 x 23 + 0 x 22 + 0 x 2 +1 = (1100001001)2 .
Итак, в двоичной системе счисления вместо числа 777 приходится писать число 1100001001.
При записи числа в двоичной системе каждая позиция занята двоичной цифрой. Вместо двух слов «двоичная цифра» употребляют одно слово: «бит». Мы уже упоминали, что оно произошло от английского bit, составленного из начальных и конечной букв словосочетания binary digit, что в переводе с английского означает «двоичная цифра». С помощью одного бита можно записать только число 0 и 1, двух бит - числа от 0 до 3, трех бит - числа от 0 до 7, четырех бит – числа от 0 до 15 и т.д.
Десятичная запись:
0 1 2 3 4 5 6 7 8 9 10 11 … 15 16
Двоичная запись:
0 1 10 11 100 101 110 111 1000 1001 1010 1011 … 10000
Чтобы записать числа от 0 до 1000, потребуется десять бит. И двоичной системе счисления даже сравнительно небольшое число шнимает много позиций.
Как теперь перевести дискретные значения тока микрофона в цифровой двоичный код?
В XVIII веке крупнейший математик Л. Эйлер показал, что с помощью набора гирь 1, 2, 4, 8, и 16 кг можно взвесить любой груз с точностью до 1 кг. Взвешиваемый груз (обозначим его массу через М, кг) математически можно представить как
М = а4 x 16 + а3 x 8 + а2 x 4 + а1 x 2 + а0 x 1 = = а4 x 24 + а3 x 23 + а2 + 22+а1 + 21 + а0 x 20,
где каждый коэффициент а = 1, если соответствующую гирю кладем на чашу весов, а = 0, если этой гирей не пользуемся при взвешивании. Таким образом, процедура взвешивания сводится к представлению десятичного числа в двоичной системе счисления.
Поясним это на примере. Пусть нам нужно взвесить груз массой 21 кг. Поставим сначала на чашу весов самую большую гирю -массой 16 кг. Поскольку она не перетягивает груз, оставим гирю на чаше (а4 = 1) и добавим следующую - 8 кг. Ясно, что в этом случае чаша весов с гирями перетянет чашу с грузом. Снимем эту гирю (а3 = 0) и установим гирю массой 4 кг. Проведя взвешивание до конца, мы увидим, что на весах остались гири массой 16, 4 и 1 кг. Значения коэффициентов а4...а0 дают пятиразрядный двоичный код 10101 числа 21.
Механический груз мы взвешивали на механических весах. Считая отсчетное значение тока, появляющееся на выходе электронного ключа, своего рода «электрическим грузом», можно осуществить аналогичное взвешивание, но на этот раз электронным способом. Такие «электронные весы» назвали кодером (от английского coder - кодировщик). Допустим, отсчетное значение тока равно 21 мА. Роль «электрических гирь» в кодере выполняют эталонные токи величиной 16, 8, 4, 2 и 1 мА, которые вырабатываются специальным устройством. Каждая проба - подходит та или иная «гиря» либо нет - производится в строго установленные промежутки времени. Вся процедура взвешивания должна закончиться до прихода с электрического ключа следующего отсчетного значения тока (напомним, для звуков речи это время составляет всего 125 мкс). Итак, сначала отсчетное значение тока сравнивается с эталоном, равным 16 мА, и, поскольку оно больше эталона, на выходе кодера появляется импульс тока, что соответствует двоичной цифре 1. В следующий интервал времени к первому эталонному току добавляется второй величиной 8 мА. Теперь суммарный вес «электрической гири» равен 24 мА. Это больше отсчетного значения, поэтому второй эталонный генератор отключается. На данном интервале времени импульс тока на выходе кодера не появляется, что соответствует двоичной цифре 0. Думаем, читатели без труда завершат процедуру взвешивания.
Таким образом, за время взвешивания одного отсчетного значения кодер вырабатывает серию импульсов, полностью повторяющую двоичный код отсчетного значения микрофонного тока.
Нельзя не напомнить вновь еще об одном виде искажений, появляющихся при переводе отсчетного значения тока в двоичный код. Так, если кодированию подвергается отсчетное значение 21.7мА, кодер все равно выдает код 10101, как и в случае целого значения 21 мА. Это и понятно, поскольку «взвешивание» проводилось с точностью до 1 мА - веса самой меньшей «электрической гири». Такое округление чисел в технике называется квантованием, а разница ме-отсчетным значением тока и величиной, набираемой двоичным кодом, - ошибкой квантования.
Однако и искажения, вызванные ошибками квантования, можно •ели и не исключить совсем, то по крайней мере значительно уменьшить. Пусть, например, самая маленькая «электрическая гиря будет иметь «вес» 0,125 мА. Тогда, взяв восемь «гирь», соот-ветствующие 16; 8; 4; 2; 1; 0.5; 0.25; 0.125 мА, можно будет «взве-шивать» отсчетные значения тока с точностью до 0.125 мА. При этом ми по 21 представится 8-разрядным двоичным кодом 10101000, а число 21,7 - кодом 10101101, где последние три цифры означают добавку 0.625 к числу 21. Применение же 12-разрядного двоичного кода позволяет вместо числа 21,7 набрать весьма близкое к нему число 21,6921895.
Успехи в развитии интегральной микросхемотехники позволили объединить в корпусе одной небольшой микросхемы электронный ключ и кодер. Эта микросхема преобразует непрерывную (часто говорят аналоговую) электрическую величину в двоичный цифро-вой код и известна под названием аналого-цифрового преобразо-вателя (АЦП). Выпускаются АЦП с 8-, 10- и 12-разрядными двоичными кодами.
Интересно подсчитать, какую скорость имеет цифровой поток, помученный из непрерывного телефонного сигнала путем дискретизации его через 125 мкс и 8-разрядного кодирования. За секунду ток микрофона изменяется 8000 раз. В 8-разрядном кодере каждое измеренное значение тока представляется двоичным словом из 8 бит. Значит, каждую секунду в линию отправляется 8000 x 8 = 64000 бит, т,е. скорость цифрового потока равна 64 кбит/с.
Кодовая комбинация из 8 бит, образующая двоичное слово, называется байтом. Символы в каждой кодовой комбинации отделены друг от друга временным интервалом fT, т.е. следует с часто-той fT =1/tT . Эта частота называется тактовой. Преобразование отсчетов непрерывного сигнала в двоичный код называется импульсно-кодовой модуляцией (ИКМ). В настоящее время этот способ получения цифровых сигналов из аналоговых наиболее распространен. Системы передачи, использующие данное преобразование сигналов, называются ИКМ-системами. В иностранной литературе используется аббревиатура РСМ (от английских слов pulse code modulation, что в переводе как раз и означает импульсно-кодовая модуляция).