ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 20.10.2024
Просмотров: 314
Скачиваний: 0

СОДЕРЖАНИЕ
Часть I. Способы передачи сообщений
1.1 Спектры периодических сигналов
1.2. Спектры непериодических сигналов
1.3. Сигналы электросвязи и их спектры
2.1. Принципы передачи сигналов электросвязи
3.1. Понятие о цифровых сигналах
3.2. Дискретизация аналоговых сигналов
3.3. Квантование и кодирование
3.4. Восстановление аналоговых сигналов
Глава 4. Принципы многоканальной передачи
4.1. Одновременная передача сообщений
4.2. Частотное разделение каналов
4.3. Временное разделение каналов
Глава 5. Цифровые системы передачи
5.1. Формирование группового сигнала
6.3. Регенерация цифровых сигналов
5.4. Помехоустойчивое кодирование
6.1. Плезиохронная цифровая иерархия
6.2. Синхронная цифровая иерархия
7.3. Волоконно-оптические кабельные линии
8.1. Предпосылки создания транспортных сетей
8.2. Системы передачи для транспортной сети
Vc низшего порядка (Low order vc, lovc)
Vc высшего порядка (High order vc, hovc)
8.3. Модели транспортных сетей
8.4. Элементы транспортной сети
8.5. Архитектура транспортных сетей
Часть II. Службы электросвязи. Телефонные службы и службы документальной электросвязи
Глава 9. Основные понятия и определения
9.1. Информация, сообщения, сигналы
9.2. Системы и сети электросвязи
9.3. Эталонная модель взаимосвязи открытых систем
9.4. Методы коммутации в сетях электросвязи
9.5 Методы маршрутизации в сетях электросвязи
Т а б л и ц а 9.2. Устройства, реализующие функции маршрутизации
10.1. Услуги, предоставляемые общегосударственной системой автоматизированной телефонной связи
10.3. Расчет коммутационного узла с коммутацией каналов 10.3.1. Модель коммутационного узла
10.3.1 Модель коммутационного узла
10.3.2. Структура коммутационных полей станций и узлов
10.3.3. Элементы теории телетрафика
11.2. Направления развития телеграфной связи
Глава 12. Службы пд. Защита от ошибок и преобразование сигналов
12.2. Сигналы и виды модуляции, используемые в современных модемах
13.1. Компьютеры — архитектура и возможности
13.2. Принципы построения компьютерных сетей
13.3. Международные стандарты на аппаратные и программные средства компьютерных сетей
13.4. Сетевые операционные системы
13.5. Локальные компьютерные сети
13.6. Глобальные компьютерные сети
13.7. Телефонная связь по компьютерным сетям
14.1. Основы факсимильной связи
14.2. Организация факсимильной связи
Глава 15. Другие службы документальной электросвязи
Глава 16. Единая система документальной электросвязи
16.1. Интеграция услуг документальной электросвязи [1]
16.2. Назначение и основные принципы построения служб обработки сообщений [2]
16.3. Многофункциональные терминалы
Глава 17. Обеспечение информационной безопасности в телекоммуникационных системах
17.2. Правовые и организационные аспекты информационной безопасности
17.3. Технические аспекты информационной безопасности
Часть III. Интеграция сетей и служб электросвязи
Глава 18. Узкополосные цифровые сети интегрального обслуживания (у-цсио)
18.1. Пути перехода к узкополосной цифровой сети интегрального обслуживания
18.2. Службы и услуги узкополосной цсио
18.3. Система управления у-цсио
Глава 19. Широкополосные и интеллектуальные сети
19.1. Условия и этапы перехода к широкополосной сети интегрального обслуживания (ш-цсио)
19.3. Способы коммутации в ш-цсио
19.4. Построение коммутационных полей станций ш-цсио
19.5. Причины и условия перехода к интеллектуальной сети (ис)
Глава 20. Система межстанционной сигнализации по общему каналу в цсио
20.1. Понятие об общем канале сигнализации
20.2. Протоколы системы сигнализации № 7 itu-t
20.3. Способы защиты от ошибок в окс № 7
20.5. Способы построения сигнальной сети
Глава 21. Широкополосные сети и оборудование компании «Huawei Technologies Co, Ltd»
21.1. Оптическая сеть абонентского доступа с интеграцией услуг honet
21.2. Построение транспортных сетей на базе оборудования компании «Huawei Technologies Co., Ltd»
21.3. Цифровая коммутационная система с программным управлением с&с08
21.4. Высокоскоростной коммутирующий маршрутизатор Radium 8750
Часть IV. Современные методы управления в телекоммуникациях
22.1. Многоуровневое представление задач управления телекоммуникациями
22.2. Функциональные группы задач управления
Глава 23. Интегрированные информационные системы управления предприятиями электросвязи
23.1. Понятия и определения в области информационных систем управления предприятием
Глава 24. Управление услугами. Качество предоставляемых услуг
24.1. Система качества услуг электросвязи
24.2. Базовые составляющие обеспечения качества услуги
24.3. Оценка качества услуг связи с точки зрения пользователя и оператора связи
Глава 25. Управление услугами.
25.3. Централизованный способ построения системы расчетов
25.4. Интеграция аср с системами управления tmn
25.5. Основные технические требования для аср
25.6. Обзор автоматизированных систем расчетов
Глава 26. Управление сетями и сетевыми элементами
26.1. Архитектура систем управления сетями и сетевыми элементами
26.2. Системы управления первичными и вторичными сетями
26.3. Принципы построения системы управления
Глава 27. Решения компании strom telecom в области tmn (Foris oss)
27.1. Общая характеристика семейства продуктов Foris oss
27.2. Автоматизация расчетов. Подсистема TelBill
27.3. Многофункциональные подсистемы сбора данных и взаимодействия с атс
27.4. Подсистема сбора данных и их биллинговой предобработки TelCharge
27.5. Подсистемы TelRes, TelTe, TelRc
27.6. Система «Электронный замок»
27.7. Подсистема поддержки клиентов tccs (Foris Customer Care Systems)
Взглянем на устройство синхронизации, предложенное Ж. Бодо, с несколько более общих позиций. Когда щетка передающего распределителя скользила по сегменту, соединенному с батареей, в линию посылается «отрезок» постоянного тока, т.е. импульс. Этот импульс является ничем иным, как синхросигналом, дающим приемнику указание «начинаем новый цикл!», и приемник исполнял эту директиву, притормаживая распределитель с тем, чтобы сразу же после окончания синхросигнала начать новый цикл. Таким образом, один цикл работы системы Бодо включает в себя (рис. 5.8) передачу в линию сначала сигнала синхронизации, а затем поочередно 5-разрядных кодовых комбинаций букв от каждого телеграфного аппарата.
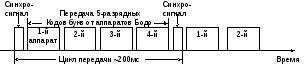
Рис. 5.8. Цикл передачи в системе Бодо
Длится такой цикл по современным понятиям невероятно долго - около 200 мс. Это и понятно, ведь мотору приходится совершать около 5 об./с (300 об./мин), а для небольших моторов это и сейчас едва ли не предел.
Схему, предложенную Бодо, можно считать прямой предшественницей схем цикловой синхронизации, применяемых в современных цифровых системах передачи, поскольку и во всех современных системах, перед тем как объединять цифровые потоки различных каналов, в приемник посылается сигнал о начале цикла. Приемное устройство «знает»: поступил такой синхронизирующий сигнал - распахивай «двери» демультиплексора для цифрового потока первого канала. Затем под «руководством» тактовых импульсов открываются следующие «двери» для цифровых потоков остальных каналов. приходом нового синхросигнала начинается все сначала, опять с первых «дверей». синхросигнал нужно как-то отличать от других принятых комбина-ций. Для этого ему присваивают вполне определенную комбинацию I. Например, в разработанной российскими специалистами системе передачи ИКМ-30 для синхросигнала принята следующая ком-бинация: 0011011 (рис. 5.9). Но где гарантия, что подобная комбина-ция импульсов не встретится и в цифровом потоке какого-либо канала? Конечно, такое может произойти, но только не так часто. Вероятность данного события чрезвычайно мала. А вот синхросигнал такой структуры встречается с завидной регулярностью - через каждые 250 Это его свойство - повторяемость - используется для «узнава-ния . Необходимо каждую принятую кодовую комбинацию сравнивать с комбинацией синхросигнала, которая на приеме известна и хранит-ся в ячейке памяти. Специальное устройство следит за тем, регулярно ми появляется такая комбинация. Если через каждые 250 мкс, то все в порядке - мы имеем дело с синхросигналом. Решение принима-ется обычно после нескольких его повторений.
При включении аппаратуры в работу цикловой синхронизм уста-навливается не сразу, а через определенный промежуток времени, который называется временем вхождения в синхронизм.
Это время должно быть достаточно малым (не более нескольких миллисекунд). В противном случае при случайной потере синхронизма может произойти разъединение абонентов приборами АТС.
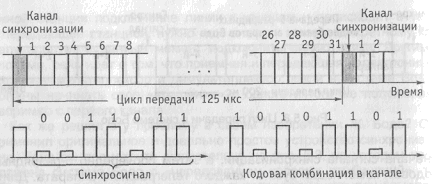
Рис. 5.9. Цикл передачи в системе ИКМ-30
Поиск состояния синхронизма осуществляется последовательным контролем и сравнением кодовых групп группового сигнала с эталоном синхросигнала, который вырабатывается генераторным оборудованием (ГО) приемной станции. Если кодовая группа не соответствует эталону, приемник синхросигнала осуществляет сдвиг («торможение») последовательности управляющих импульсов, вырабатываемых ГО приема, на один период тактовой частоты. Такое «торможение» приемного ГО по отношению к передающему продолжается до тех пор, пока между сравниваемой кодовой группой и эталоном синхросигнала не установится однозначное соответствие, фиксирующее состояние синхронизма в системе.
Все кодовые комбинации в объединяемых цифровых потоках имеют по восемь разрядов, а синхросигнал - только семь (см. рис. 5.9). Значит, комбинацию синхросигнала можно дополнять до «стандартного» числа разрядов, т.е. до восьми, передавая в «пустом» промежутке времени биты, например, от персональных компьютеров. Скорость передачи таких данных достигает при этом 8 кбит/с.
Получается, что с вводом сигнала синхронизации в цифровой системе передачи, по сути, организован еще один «стандартный» канал, в котором скорость передачи битов (вместе с битом компьютерных данных) оказывается равной 64 кбит/с и который, следовательно, ничем не отличается от основных, или информационных, каналов. Он не относится к информационным каналам, а является служебным и создан для обслуживания самой системы передачи. Цифра же 30 в названии системы передачи указывает на количество только информационных каналов. Существует еще один служебный канал, 32-й (по счету но не по расположению его среди других), который тоже явля-ется стандартным, со скоростью 64 кбит/с. Правда, предназначен он уже не для обслуживания цифровой системы передачи. По нему передают различные служебные сигналы, без которых невозможно установление связи, например: импульсы от номеронабирателя, сигнал в том, что абонент занят (короткие гудки), и многие другие, используемые на телефонных станциях для управления ее приборами.

6.3. Регенерация цифровых сигналов
Изменения формы импульсов при прохождении их по линии связи называются искажениями. Как только появилась первая линия связи (телеграфный провод), так сразу перед связистами встала задача -направить все свои силы на борьбу с искажениями, которые есть всегда. Не существует такой линии связи, которая не вносила бы искажений в передачу информации (рис. 5.10). Правда, чем короче линия тем эти искажения менее заметны. Искажения ограничивают дальность связи и иногда весьма существенно, поскольку на приеме из-за них бывает очень трудно определить, какая информация пе-редавалась.
Одним из основных преимуществ цифровых систем передачи яв-ляется возможность восстановления (регенерации) импульсных сиг-налов. Регенерация линейного сигнала осуществляется регенераторами.
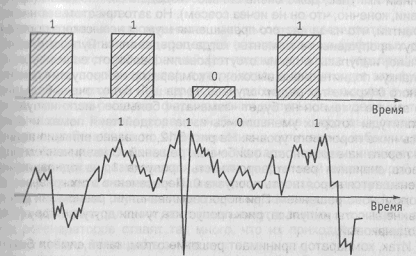
Рис. 5.10. Искажения цифрового сигнала при передаче по линии связи

Рис. 5.11. Восстановление (регенерация) искаженного цифрового сигнала
Если поступивший из линии сигнал превышает установленный пороговый уровень - передана 1, ниже порогового уровня - передан 0. Это правило очень простое и легко реализуется с помощью микросхем (их назвали компараторами), сравнивающих два сигнала, один из которых поступает из линии, а другой является эталоном, или опорным, и играет роль порога. При превышении порога на выходе компаратора появляется импульс, свидетельствующий о том, что принято решение: передана 1. В противном случае на его выходе ничего нет - молчаливое свидетельство того, что передан 0 (рис. 5.11).
Вот только какой «высоты» этот порог устанавливать? Если небольшой, то компаратор будет уверенно обнаруживать каждый переданный импульс, даже очень сильно «изъеденный» помехой (при условии, конечно, что он не исчез совсем). Но зато при этом нет никакой гарантии, что из-за частого превышения шумом невысокого порога не будут пропущены те моменты, когда передавались нули, и следовательно, импульсы в линии отсутствовали. Наоборот, если пороговую «планку» поднять очень высоко, то компаратор не пропустит почти ни одного 0 (кроме тех редких случаев, когда шум будет очень большим). Но вместе с тем он не будет «замечать» большое число импульсов, амплитуды которых уменьшились из-за воздействия помех и оказались ниже порогового уровня. На рис. 5.12, показано влияние величины порога на вероятность ошибочных решений. С увеличением порогового значения растет вероятность пропуска 1, но одновременно уменьшается вероятность пропуска 0. Пересечение этих кривых - вот «соломоново решение»! При пороговом значении, равном как раз половине высоты импульса, риск пропустить ту или другую цифру (0 или 1)одинаковый.
Итак, компаратор принимает решение о том, какой символ был передан, путем сравнивания амплитуды входного сигнала с эталонным значением - порогом. Все то время, в течение которого сигнал по высоте превышает порог, на выходе компаратора существует импульс, сигнализирующий об этом превышении.
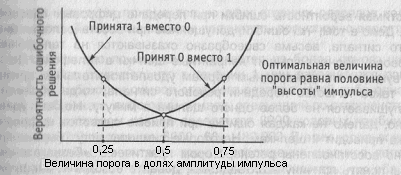
Рис. 5.12. Влияние величины порога на вероятность ошибочных решений
Но нужно ли проводить такое сравнение непрерывно? Очевидно, нет, тем более что компаратор будет выдавать импульсы неодинаковой длительности. (В этом легко убедиться, проведя на рисунке, изображающем искаженный сигнал, горизонтальную черту - порог: все превышения этого порога имеют разную длительность.) Поэтому поступают так: через равные промежутки времени - тактовые интервалы - на компаратор поступает команда «произвести сравнение!» Кто дает такие указания, вы знаете - система синхронизации. Значит, опять нужны тактовые импульсы. Эти импульсы выделяют из цифрового потока тем способом, который мы уже описывали ранее.
Восстановление длительности импульсов осуществляется мультивибратором. Описанная процедура восстановления цифровых сигналов называется регенерацией (от позднелатинского regeneratio - возрождение, возобновление), а устройство, выполняющее эти функ-
ции,- регенератором. Как мы видели, регенератор включает в себя схемы: принятия решения, формирования импульсов, выделение тактовой частоты. Регенераторами снабжаются все цифровые системы передачи, работающие по электрическим и оптическим кабелям, радиорелейным и спутниковым стволам. На радиорелейных линиях связи регенераторы размещаются вместе с приемной аппаратурой на промежуточных и оконечных башнях (или мачтах), а на спутниковых линиях - на самом спутнике и на приемных земных станциях. А вот на кабельных магистралях их даже закапывают в землю, т.е. на этих линиях регенераторов ставят так много, что их приходится «врезать» прямо в кабель, лежащий в земле.
Как часто следует включать в телефонный кабель регенераторы? Очевидно, это зависит от того, какую вероятность ошибки можно доить при приеме цифровой информации. Вот как определяется допустимая вероятность ошибки при передаче цифровым способом речи. Дело в том, что ошибки, допущенные при восстановлении цифрового сигнала, весьма своеобразно сказываются на телефонном разговоре: абонент слышит неприятные щелчки в телефоне. По существующим международным нормам удовлетворительным признается такое качество передачи речевого сигнала, когда абонентом прослушивается не более одного щелчка в минуту. Но, что удивительно, далеко не каждая ошибка при приеме символов цифрового потока приводит к щелчкам. Некоторые символы могут быть неправильно восстановлены регенератором практически «безнаказанно»! Чтобы понять причину этого явления, давайте вспомним, как происходит процесс преобразования телефонного сигнала в цифровой. В аналого-цифровом преобразователе (АЦП) непрерывный телефонный сигнал превращается в последовательность отсчетов (в секунду их берется 8000), кодируемых в виде 8-разрядной комбинации двоичных цифр 0 и 1 .