ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 20.10.2024
Просмотров: 334
Скачиваний: 0

СОДЕРЖАНИЕ
Часть I. Способы передачи сообщений
1.1 Спектры периодических сигналов
1.2. Спектры непериодических сигналов
1.3. Сигналы электросвязи и их спектры
2.1. Принципы передачи сигналов электросвязи
3.1. Понятие о цифровых сигналах
3.2. Дискретизация аналоговых сигналов
3.3. Квантование и кодирование
3.4. Восстановление аналоговых сигналов
Глава 4. Принципы многоканальной передачи
4.1. Одновременная передача сообщений
4.2. Частотное разделение каналов
4.3. Временное разделение каналов
Глава 5. Цифровые системы передачи
5.1. Формирование группового сигнала
6.3. Регенерация цифровых сигналов
5.4. Помехоустойчивое кодирование
6.1. Плезиохронная цифровая иерархия
6.2. Синхронная цифровая иерархия
7.3. Волоконно-оптические кабельные линии
8.1. Предпосылки создания транспортных сетей
8.2. Системы передачи для транспортной сети
Vc низшего порядка (Low order vc, lovc)
Vc высшего порядка (High order vc, hovc)
8.3. Модели транспортных сетей
8.4. Элементы транспортной сети
8.5. Архитектура транспортных сетей
Часть II. Службы электросвязи. Телефонные службы и службы документальной электросвязи
Глава 9. Основные понятия и определения
9.1. Информация, сообщения, сигналы
9.2. Системы и сети электросвязи
9.3. Эталонная модель взаимосвязи открытых систем
9.4. Методы коммутации в сетях электросвязи
9.5 Методы маршрутизации в сетях электросвязи
Т а б л и ц а 9.2. Устройства, реализующие функции маршрутизации
10.1. Услуги, предоставляемые общегосударственной системой автоматизированной телефонной связи
10.3. Расчет коммутационного узла с коммутацией каналов 10.3.1. Модель коммутационного узла
10.3.1 Модель коммутационного узла
10.3.2. Структура коммутационных полей станций и узлов
10.3.3. Элементы теории телетрафика
11.2. Направления развития телеграфной связи
Глава 12. Службы пд. Защита от ошибок и преобразование сигналов
12.2. Сигналы и виды модуляции, используемые в современных модемах
13.1. Компьютеры — архитектура и возможности
13.2. Принципы построения компьютерных сетей
13.3. Международные стандарты на аппаратные и программные средства компьютерных сетей
13.4. Сетевые операционные системы
13.5. Локальные компьютерные сети
13.6. Глобальные компьютерные сети
13.7. Телефонная связь по компьютерным сетям
14.1. Основы факсимильной связи
14.2. Организация факсимильной связи
Глава 15. Другие службы документальной электросвязи
Глава 16. Единая система документальной электросвязи
16.1. Интеграция услуг документальной электросвязи [1]
16.2. Назначение и основные принципы построения служб обработки сообщений [2]
16.3. Многофункциональные терминалы
Глава 17. Обеспечение информационной безопасности в телекоммуникационных системах
17.2. Правовые и организационные аспекты информационной безопасности
17.3. Технические аспекты информационной безопасности
Часть III. Интеграция сетей и служб электросвязи
Глава 18. Узкополосные цифровые сети интегрального обслуживания (у-цсио)
18.1. Пути перехода к узкополосной цифровой сети интегрального обслуживания
18.2. Службы и услуги узкополосной цсио
18.3. Система управления у-цсио
Глава 19. Широкополосные и интеллектуальные сети
19.1. Условия и этапы перехода к широкополосной сети интегрального обслуживания (ш-цсио)
19.3. Способы коммутации в ш-цсио
19.4. Построение коммутационных полей станций ш-цсио
19.5. Причины и условия перехода к интеллектуальной сети (ис)
Глава 20. Система межстанционной сигнализации по общему каналу в цсио
20.1. Понятие об общем канале сигнализации
20.2. Протоколы системы сигнализации № 7 itu-t
20.3. Способы защиты от ошибок в окс № 7
20.5. Способы построения сигнальной сети
Глава 21. Широкополосные сети и оборудование компании «Huawei Technologies Co, Ltd»
21.1. Оптическая сеть абонентского доступа с интеграцией услуг honet
21.2. Построение транспортных сетей на базе оборудования компании «Huawei Technologies Co., Ltd»
21.3. Цифровая коммутационная система с программным управлением с&с08
21.4. Высокоскоростной коммутирующий маршрутизатор Radium 8750
Часть IV. Современные методы управления в телекоммуникациях
22.1. Многоуровневое представление задач управления телекоммуникациями
22.2. Функциональные группы задач управления
Глава 23. Интегрированные информационные системы управления предприятиями электросвязи
23.1. Понятия и определения в области информационных систем управления предприятием
Глава 24. Управление услугами. Качество предоставляемых услуг
24.1. Система качества услуг электросвязи
24.2. Базовые составляющие обеспечения качества услуги
24.3. Оценка качества услуг связи с точки зрения пользователя и оператора связи
Глава 25. Управление услугами.
25.3. Централизованный способ построения системы расчетов
25.4. Интеграция аср с системами управления tmn
25.5. Основные технические требования для аср
25.6. Обзор автоматизированных систем расчетов
Глава 26. Управление сетями и сетевыми элементами
26.1. Архитектура систем управления сетями и сетевыми элементами
26.2. Системы управления первичными и вторичными сетями
26.3. Принципы построения системы управления
Глава 27. Решения компании strom telecom в области tmn (Foris oss)
27.1. Общая характеристика семейства продуктов Foris oss
27.2. Автоматизация расчетов. Подсистема TelBill
27.3. Многофункциональные подсистемы сбора данных и взаимодействия с атс
27.4. Подсистема сбора данных и их биллинговой предобработки TelCharge
27.5. Подсистемы TelRes, TelTe, TelRc
27.6. Система «Электронный замок»
27.7. Подсистема поддержки клиентов tccs (Foris Customer Care Systems)
Следует заметить, что системы без ОС используются обычно только тогда, когда нельзя организовать канал обратной связи или когда предъявляются жесткие требования к времени задержки сооб-щения. Временем задержки кодовой комбинации называется время от момента выдачи ее первого элемента источником сообщений до момента получения последнего элемента комбинации получателем сообщений.
Системы с обратной связью. Характеризуются повторением ко-довых комбинаций, в которых обнаружены ошибки. Решение о необ-ходимости повторения может выноситься на приеме (системы с ре-шающей обратной связью - РОС) или на передаче (системы с ин-формационной обратной связью - ИОС).
Как уже отмечалось, системы с обратной связью отличаются наличием канала, по которому осуществляется «служебная» связь пере-датчика с приемником. В системах с РОС приемником определяется наличие в принятой комбинации ошибки или вычисляется вероят-ность того, что кодовая комбинация содержит ошибки. Если в кодовой комбинации обнаружены ошибки или вероятность того, что в ней со-держатся ошибки, оказалась достаточно большой, то по обратному каналу посылается сигнал решения о необходимости повторения (от-сюда название решающая обратная связь).
Соответствующий аналог передачи с РОС можно найти и в телефонной связи. Если вследствие действия помех не расслышано слово, то обычно просят его повторить.
В
системах с ИОС принятая кодовая комбинация
![]() возвращается
на передающую сторону по обратному
каналу, где она сравнивается с переданной
комбинацией Ai.
Последнюю можно рассматривать как
эталонную комбинацию. Если комбинации
возвращается
на передающую сторону по обратному
каналу, где она сравнивается с переданной
комбинацией Ai.
Последнюю можно рассматривать как
эталонную комбинацию. Если комбинации
![]() и
Аi
различаются,
то комбинация Ai
передается повторно. При разговоре по
телефону также часто используют ИОС,
когда в условиях сильных помех просят
собеседника повторить переданное ему
сообщение, чтобы убедиться, что он его
воспринял правильно.
и
Аi
различаются,
то комбинация Ai
передается повторно. При разговоре по
телефону также часто используют ИОС,
когда в условиях сильных помех просят
собеседника повторить переданное ему
сообщение, чтобы убедиться, что он его
воспринял правильно.
Системы с РОС получили наибольшее практическое распространение. Существуют различные разновидности этих систем.
Простейший и довольно часто применяемый на практике алгоритм работы системы с РОС заключается в следующем. Источник сообщений ИС выдает в кодер (рис. 12.2) первую кодовую комбинацию (или блок, состоящий из нескольких кодовых комбинаций). К исходным элементам в кодере добавляются проверочные. Комбинация выдается в дискретный канал и одновременно записывается в накопитель H1 (накопитель передачи). После выдачи первой кодовой комбинации источник ждет ответа о том, как она принята.
Принятая кодовая комбинация декодируется. Информационные элементы записываются в накопитель приема (Н2). Если ошибка не обнаружена, то по команде управляющего устройства информационные элементы из накопителя выдаются получателю, а по обратному каналу выдается сигнал «Да», подтверждающий правильность приема переданной кодовой комбинации номер один (обратный канал будем пока считать идеальным). По сигналу «Да» управляющее устройство стирает из H1 кодовую комбинацию и дает разрешение на выдачу от источника следующей кодовой комбинации. Если следующая комбинация исказилась и ошибки на приеме обнаружены, то по команде УУ2 информация из Н2 стирается, а по обратному каналу выдается сигнал «Нет».
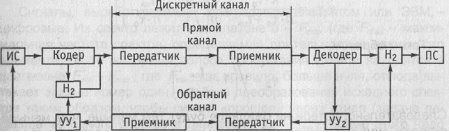
Рис. 12.2. Функциональная схема системы с РОС-ОЖ
По этому сигналу на передающем конце УУ1 запрещает выдачу следующей кодовой комбинации от источника и дает команду о повторной выдаче искаженной комбинации из накопителя H1. Теоретически кодовая комбинация может повторяться бесконечное число раз. Обычно после определенного числа повторений (например, трех) кодовая комбинация стирается. Очевидно, что чем больше повторений на анализируемом интервале времени, тем хуже качество канала, тем дольше длится «перекачка» сообщения от источника и тем ниже скорость передачи информации.
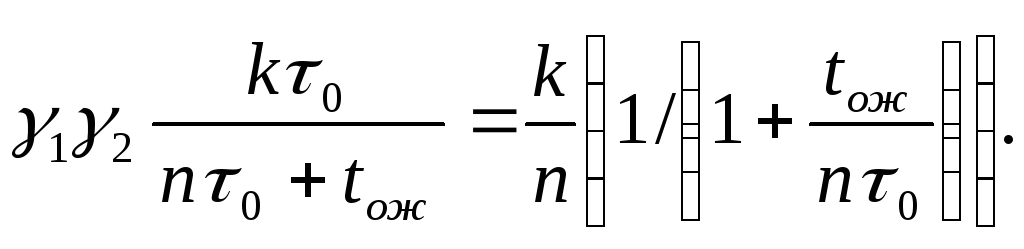
Рассматриваемый алгоритм работы системы называется алгоритмом с ожиданием, а сама система передачи дискретных сообщений -системой с решающей обратной связью и ожиданием (РОС-ОЖ). Такие системы довольно часто используются для передачи дискретных сообщений. Основное их достоинство - простая техническая реализация. К недостаткам следует отнести существенные потери скорости передачи информации, источником которых, помимо введенных в кодовую комбинацию проверочных элементов и переспросов, являются потери на ожидание ответа со стороны приемника. При этом скорость передачи информации определяется выражением
![]()
где
![]() - соответственно
коэффициенты, характеризующие потери
скорости, обусловленные наличием в
кодовой комбинации проверочных
элементов; ожиданием сигнала решения
о качестве приема; повторными
передачами кодовых комбинаций. Очевидно,
что процент потерь скорости определяется
как
- соответственно
коэффициенты, характеризующие потери
скорости, обусловленные наличием в
кодовой комбинации проверочных
элементов; ожиданием сигнала решения
о качестве приема; повторными
передачами кодовых комбинаций. Очевидно,
что процент потерь скорости определяется
как
![]() .
.

Учитывая,
что время, необходимое для передачи
информационных элементов одной
кодовой комбинации, равно
![]() ,
а время, затрачиваемое на передачу
одной кодовой комбинации при однократной
передаче, равно
,
а время, затрачиваемое на передачу
одной кодовой комбинации при однократной
передаче, равно
![]() -
время ожидания сигнала решения (время
от момента передачи в канал одной кодовой
комбинации до момента передачи
следующей), получаем
-
время ожидания сигнала решения (время
от момента передачи в канал одной кодовой
комбинации до момента передачи
следующей), получаем
Таким образом,
![]()
Следовательно,
потери на ожидание будут тем меньше,
чем меньше скорость модуляции (больше
![]() )
или при данной скорости модуляции больше
длина кодовой комбинации. Коэффициент
)
или при данной скорости модуляции больше
длина кодовой комбинации. Коэффициент
![]() в
(12.13) есть величина, определяемая как (1
– Роо),
где Роо
- вероятность обнаружения в кодовой
комбинации ошибок. Чем больше длина
кодовой комбинации, тем больше Роо
и меньше
в
(12.13) есть величина, определяемая как (1
– Роо),
где Роо
- вероятность обнаружения в кодовой
комбинации ошибок. Чем больше длина
кодовой комбинации, тем больше Роо
и меньше
![]() .
Нетрудно догадаться, что из этого следует
возможность оптимизации скорости путем
изменения длины кодовой комбинации.
.
Нетрудно догадаться, что из этого следует
возможность оптимизации скорости путем
изменения длины кодовой комбинации.
В
системах с РОС и непрерывной передачей
информации отсутствуют потери на
ожидание
![]() .В
этих системах при обнаружении ошибок
в принятой кодовой комбинации производится
повторение этой комбинации и ряда
других, примыкающих к ней. Для уменьшения
потерь на переспросы иногда по каналу
обратной связи передается адрес (номер)
кодовой комбинации, которую надо
повторить. Такой метод применяется
в системах с РОС и адресным переспросом.
Однако непрерывная передача информации
и тем более адресный переспрос требуют
существенного усложнения аппаратуры
ПД, что, в свою очередь, приводит к ее
удорожанию и снижению надежности.
.В
этих системах при обнаружении ошибок
в принятой кодовой комбинации производится
повторение этой комбинации и ряда
других, примыкающих к ней. Для уменьшения
потерь на переспросы иногда по каналу
обратной связи передается адрес (номер)
кодовой комбинации, которую надо
повторить. Такой метод применяется
в системах с РОС и адресным переспросом.
Однако непрерывная передача информации
и тем более адресный переспрос требуют
существенного усложнения аппаратуры
ПД, что, в свою очередь, приводит к ее
удорожанию и снижению надежности.
В простейших системах с ИОС для передачи информации по прямому каналу можно использовать простые коды (без избыточности) и тогда обратный канал должен иметь такую же пропускную способность, что и прямой.
В системах с РОС любого типа по обратному каналу передаются только сигналы решения и обратный канал имеет существенно меньшую пропускную способность. Так, при передаче информации со скоростью 600/1200 Бод по прямому каналу в обратном узкополосном канале передача осуществляется со скоростью не более чем 75 Бод.
Возможность использования узкополосного канала в качестве обратного - существенное преимущество систем с РОС, делающее их применение на практике более предпочтительным по сравнению с системами с ИОС.
12.2. Сигналы и виды модуляции, используемые в современных модемах
Сигналы,
вырабатываемые телеграфным аппаратом
или ЭВМ, -цифровые. Их спектр лежит в
диапазоне 0 - Fmax
(где Fmax
- максимальная частота спектра,
определяемая длительностью единичного
элемента). В то же время полоса пропускания
канала находится в диапазоне
![]() как
правило, больше нуля, отсюда вытекает
задача номер один - задача преобразования
исходного спектра таким образом,
чтобы сигнал «прошел» через канал
(задача переноса исходного спектра
в диапазон
как
правило, больше нуля, отсюда вытекает
задача номер один - задача преобразования
исходного спектра таким образом,
чтобы сигнал «прошел» через канал
(задача переноса исходного спектра
в диапазон
![]() ).
Кроме
этого надо сформировать сигнал, посылаемый
в канал связи так, чтобы обеспечить
достаточно высокую скорость передачи
информации (бит/с) в канале связи и при
этом получить достаточно высокую
помехо-устойчивость. Поставленные
требования противоречивы, что интуи-тивно
понятно.
).
Кроме
этого надо сформировать сигнал, посылаемый
в канал связи так, чтобы обеспечить
достаточно высокую скорость передачи
информации (бит/с) в канале связи и при
этом получить достаточно высокую
помехо-устойчивость. Поставленные
требования противоречивы, что интуи-тивно
понятно.
Различают низкоскоростные устройства преобразования сигна-лов - скорость передачи информации до 300 бит/с; среднескоростные обеспечивают работу со скоростью выше 300 бит/с (это скорости 600, 1200, 2400, 4800, 7200, 9600.. 28800 бит/с) по стандартному теле-фонному каналу; высокоскоростные - это модемы для работы по ка-налам первичной, вторичной и т.д. широкополосных групп.
ёВ низко- и среднескоростных до 1200 бит/с используется частотная модуляция. Для работы со скоростью 2400 бит/с и выше уже приме-няются фазовая (относительная фазовая) и амплитудно-фазовая модуляция.
Частотная модуляция. При передаче двоичных сигналов (0 или 1) в канал посылается частота f1 (для 1) и f2 (для 0), при этом согласно международным рекомендациям f2 > f1 (рис. 12.3). Задачу формирования сигнала на передаче выполняет модулятор, а опознавание принятой последовательности сигналов (превращение частотно-модулированных сигналов в 0 и 1) – демодулятор.
Существует несколько рекомендаций МСЭ-Т, в соответствии с которыми создаются модемы (модем - сокращение модулятор-демодулятор) с ЧМ. Это прежде всего рекомендация V.21. Соглас-но V.21 стандартный телефонный канал 0,3...3.4 кГц делится на две равные полосы. В нижнем диапазоне частот (его обычно ис-пользует для передачи вызывающий модем) 1 передается часто-той 980 Гц, а 0 - 1180 Гц. В верхнем диапазоне (передает отве-чающий) 1 передается частотой 1650 Гц, а 0 - 1850 Гц. Модуляци-онная и информационная скорости равны 300 Бод и 300 бит/с со-ответственно. Несмотря на невысокую скорость, протокол V.21 находит в настоящее время применение в качестве «аварийного», при невозможности вследствие высокого уровня помех использовать другие протоколы физического уров-ня. Кроме того, ввиду своей «неприхотливости» и высокой помехо-устойчивости он используется как вспомогательный в специальных приложениях, требующих высокой надежности. Например, при уста-новлении соединения между моде-мами, работающими с существенно большей скоростью, чем 300 бит/с, или для передачи управляющих команд при факсимильной связи [1].