ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 20.07.2024
Просмотров: 673
Скачиваний: 0

СОДЕРЖАНИЕ
А.Г. Староверов основы автоматизации производства
Глава 1. Общие сведения о системах автоматики и составляющих ее элементах
1. Основные понятия и определения
2. Классификация систем автоматического управления
3. Элементы автоматических систем
Глава 2. Первичные преобразователи
1. Общие сведения и классификация первичных преобразователей
2. Потенциометрические первичные преобразователи
3. Индуктивные первичные преобразователи
4. Емкостные первичные преобразователи
5. Тензометрические первичные преобразователи
6. Фотоэлектрические первичные преобразователи
Глава 3. Усилители и стабилизаторы
2. Электромеханические и магнитные усилители
Глава 4. Переключающие устройства и распределители
3. Контактные аппараты управления
4. Бесконтактные устройства управления
Наименование н обозначение логических функций н элементов
Глава 5. Задающие и исполнительные устройства
1. Классификация задающих и исполнительных устройств
3. Электрические исполнительные механизмы
Раздел II. Контрольно-измерительные приборы и техника измерения параметров технологических процессов
Глава 6. Общие сведения об измерении и контроле
1. Основные метрологические понятия техники измерения и контроля
3. Методы измерения и классификация. Контрольно-измерительных приборов
1. Температурные шкалы. Классификация технических приборов и устройств измерения температуры
Технические характеристики стеклинных ртутных, термометров типа тт
Технические характеристики дилатометрических гермометров
Характеристики манометрических термометров
4. Термоэлектрические термометры
Основные характеристики термоэлектрических термометров
Технические характеристики милливольтметров
5. Термометры сопротивления и термисторы
Технические характеристики термометров сопротивления
6. Бесконтактное измерение температуры
7. Техника безопасности при контроле температуры
Глава 8. Контроль давления и разрежения
1. Общие сведения и классификация приборов
Технические характеристики показывающих и сигнализирующих манометров
Технические характеристики тягомеров, напоромеров и тягонапоромеров
Технические характеристики промышленных вакуумметров
5. Техника безопасности при контроле давления
Глава 9. Контроль расхода, количества и уровня
1. Общие сведения и классификация приборов
Технические характеристики ротаметров
Технические характеристики шариковых расходомеров
Технические характеристики счетчиков жидкостей и газов
4. Счетчики и весы твердых и сыпучих материалов
5. Уровнемеры жидкостей и сыпучих материалов
Технические характеристики поплавковых уровнемеров с пружинным уравновешиванием
Технические характеристики буйковых уровнемеров
6. Техника безопасности при контроле расхода, количества и уровня
Глава 10. Контроль специальных параметров
2. Контроль влажности и запыленности газа
3. Контроь влажности сыпучих материалов
4. Контроль плотности жидкости
5. Техника безопасности при контроле специальных параметров
Раздел III. Автоматическое управление, контроль и регулирование
Глава 11. Системы автоматики с программным управлением
1. Общие принципы построения систем
2. Интуитивный метод разработки схем управления
3. Аналитический метод разработки схем управления
Глава 12. Автоматическая блокировка и защита в системах управления
1. Системы автоматической блокировки
2. Системы автоматической защиты
Глава 13. Системы автоматического контроля и сигнализации
2. Измерительные системы с цифровым отсчетом
3. Системы централизованного контроля
4. Системы автоматической сигнализации
Глава 14. Системы автоматического регулирования
1. Основные понятия и определения
2. Обыкновенные системы регулирования
3. Самонастраивающиеся системы регулирования
4. Качественные показатели автоматического регулирования
Глава 15. Объекты регулирования и их свойства
2. Параметры объектов регулирования
3. Определение основных свойств объектов
1. Классификация автоматических регуляторов
2. Регуляторы прерывистого (дискретного) действия
3. Регуляторы непрерівного действия
4. Выбор типа регуляторов и параметров его настройки
Формулы для определения параметров настройки регуляторов
Глава 17. Конструкции и характеристики регуляторов
1. Регуляторы прямого действия
2. Электрические регуляторы косвенного действия
3. Гидравлические регуляторы косвенного действия
4. Пневматические регуляторы косвенного действия
5. Техника безопасности при эксплуатации регуляторов
Раздел IV. Микропроцессорные системы
Глава 18. Общая характеристика микропроцессорных систем
1. Основные понятия и определения
2. Организация работы вычислительной машины
Глава 19. Математическое и программное обеспечение микроЭвм
2. Правила перевода одной системы счисления в другую
3. Формы представления чисел в эвм. Машинные коды
Глава 20. Внешние устройства микроЭвм
1. Классификация внешних устройств
2. Внешние запоминающие устройства
3. Устройства для связи эвм – оператор
4. Внешние устройства связи эвм с объектом
Глава 21. Применение микропроцессорных систем
1. Состав систем автоматики с применением микроЭвм
2. Управление производственными процессами
Раздел V. Промышленные роботы и роботизированные системы
Глава 22. Общие сведения о промышленных роботах
1. Основные определения и классификация промышленных роботов
2. Структура промышленных роботов
3. Основные технические показатели роботов
Глава 23. Конструкции промышленных роботов
1. Промышленные роботы агрегатно-модульного типа
Технические данные агрегатной гаммы промышленных роботов лм40ц.00.00 [9]
Технические характеристики и области обслуживания типового ряда промышленных роботов [9]
Технические данные модулей агрегатной гаммы рпм-25 [9]
2. Интерактивные промышленные роботы
3. Адаптивные промышленные роботы
5. Приводы промышленных роботов
Глава 24. Системы управления промышленными роботами
1. Назначение и классификация систем управления
2. Унифицированные системы управления
Технические данные унифицированных систем управления уцм [9]
Технические данные унифицированных систем управления упм [9]
Технические данные контурных систем управления укм [9]
Глава 25. Роботизация промышленного производства
1. Основные типы роботизированных систем
2. Гибкие производственные системы с применением промышленных роботов
3. Техника безопасности при эксплуатации роботов
Приложение Буквенные обозначения элементов электрических схем
В системе СИ объемный расход Q измеряется в кубических метрах в секунду, а массовый М – в килограммах в секунду, иногда используют единицу – литр в секунду.
Для измерения расходов газов и жидкостей применяют приборы, называемые расходомерами.
В тех случаях, когда требуется отмерять и учитывать количество вещества, используют счетчики и весы. С их помощью ведут учет сырья и готовой продукции, электроэнергии, пара и воды.
Применяют также комбинированные приборы; в расходомеры встраивают интегрирующие (суммирующие) устройства, позволяющие вести суммарный учет вещества, израсходованного за заданный промежуток времени.
В зависимости от принципа действия приборы для измерения расхода жидкостей и газа подразделяют на расходомеры обтекания, переменного перепада давления и переменного уровня, индукционные, тахометрические и объемные.
Для измерения расхода твердых и сыпучих материалов используют механические, электрические, фотоэлектрические с радиоизотопными счетчиками весы и весы с ручной наводкой, а также автоматические порционные, платформенные и автомобильные, тензометрические и другие весы.
Для контроля уровня жидкости или сыпучего материала применяют приборы, называемые уровнемерами. Уровень жидкости или сыпучего материала – это высота границы раздела жидкости или сыпучего материала и воздуха (газа), находящегося над жидкостью или сыпучим материалом, относительно условного (нулевого) отсчета. Отсчетом измерения уровня, как правило, является резервуар или бункер, в котором измеряется уровень жидкости или сыпучего материала.
Большое разнообразие объектов измерения обусловило многообразие физических принципов и средств измерений уровня, удовлетворяющих тем или иным требованиям.
Все приборы контроля уровня можно разделить по метрологическому принципу на две группы. Первую группу приборов используют для непрерывного измерения уровня и называют уровнемерами. Приборы второй группы предназначены для сигнализации о достижении заданного (контрольного) уровня, например верхнего или нижнего. Их называют сигнализаторами уровня.
2. Расходомеры
В соответствии с применяемыми методами приборы для измерения расхода подразделяют на расходомеры обтекания, переменного перепада давления, переменного уровня, индукционные, тахометрические и объемные. Последние чаще используют в качестве счетчиков.
Из расходомеров обтекания наибольшее распространение получили расходомеры постоянного перепада давления, получившие название ротаметров. Чувствительным элементом этих приборов является поплавок (шарик), воспринимающий динамическое давление потока. Принцип действия ротаметра (рис. 75) основан на том, что при движении жидкости или газа снизу вверх через конусную трубку 1 поплавок 2 поднимается (опускается) до тех пор, пока его сила тяжести не уравновесится разностью давлений до и после поплавка и выталкивающей силой. При постоянной плотности и кинематической вязкости сред значение расхода соответствует строго определенному положению поплавка.
К основным преимуществам ротаметров следует отнести простоту конструкции, значительный диапазон измерения и возможность измерения малых расходов и расходов агрессивных сред. К недостаткам относятся большая чувствительность к изменению вязкости жидкой среды при изменении температуры и невозможность измерения расхода загрязненных жидкостей, из которых выпадают осадки.
Промышленность выпускает ротаметры трех видов: показывающие (табл. 12) для местного контроля расхода без передачи информации (рис. 75, а); с электрической дистанционной передачей информации без местной шкалы (рис. 75, б) и с пневматической дистанционной передачей и местной шкалой показаний.
В термических и литейных цехах ротаметры применяют для измерения расхода природного газа, азота, аммиака и водорода.
Работа расходомеров переменного перепада давления основана на измерении перепада давления, создаваемого с помощью дросселя, в зависимости от расхода среды.
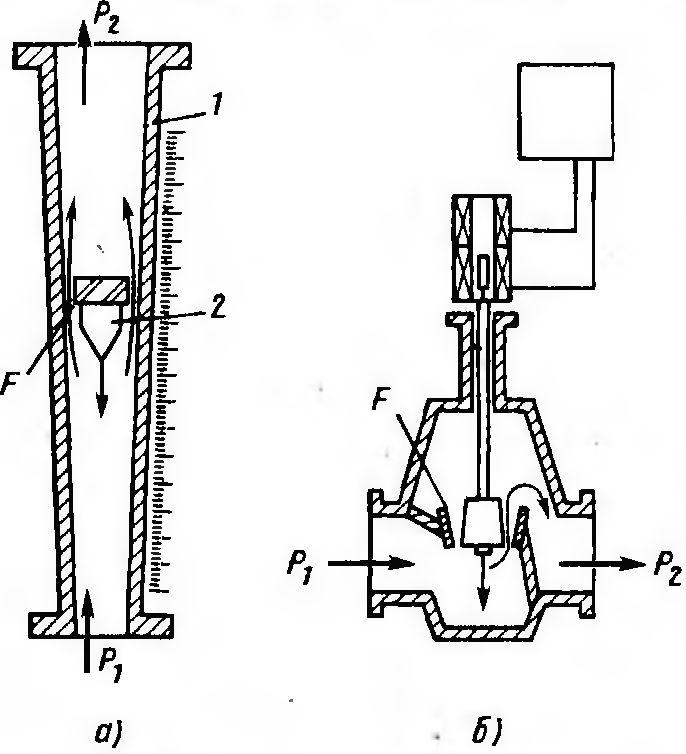
Рис. 75. Ротаметры:
а – для местного измерения; б – с электрической передачей информации; 1 – коническая трубка; 2 – поплавок
Таблица 12
Технические характеристики ротаметров
|
Тип |
Верхний предел измерения, м2/ч |
Диаметр условного прохода, мм |
|
|
по воде |
по воздуху |
||
|
РМ-А-0,0025 |
0,0025 |
– |
3 |
|
РМ-А-0,1ГУЗ |
– |
0,1 |
3 |
|
РМ-0,016ЖУЗ |
0,016 |
– |
6 |
|
РМ-0,25ГУЗ |
– |
0,25 |
6 |
|
РМ-0,16ЖУЗ |
0,16 |
– |
15 |
|
РМ-0,25ГУЗ |
– |
0,25 |
15 |
Метод измерения основан на том, что поток среды, протекающий в трубопроводе, неразрывен, и в месте установки дросселирующего сужающего устройства скорость его увеличивается. При этом происходит частичный переход потенциальной энергии давления в кинетическую энергию скорости, вследствие чего статическое давление в узком сечении будет меньше давления перед местом сужения, т. е. возникает перепад давления. Расходомер этого типа представляет собой измерительный комплекс, состоящий из трех узлов: приемного преобразователя, создающего перепад давления в зависимости от расхода среды и устанавливаемого внутри трубопровода; соединительных трубок с вспомогательными устройствами; дифференциального манометра.
В качестве устройства для создания в трубопроводе перепада давления чаще всего используются стандартные сужающие устройства: диафрагмы (рис. 76, а), сопла (рис. 76, б) и трубы Вентери (рис. 76, в).
Дифференциальные манометры, применяемые для измерения перепада давления в расходомерах, имеют неравномерную шкалу в связи с существующей квадратичной зависимостью между перепадами давления и объемным расходом.
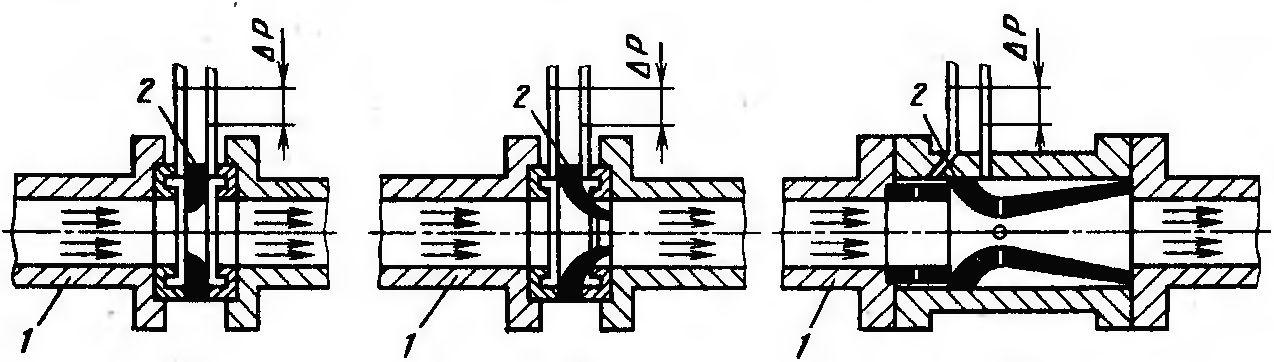
Рис. 76. Стандартные сужающие устройства расходомеров переменного перепада давления:
а – дисковая диафрагма; б – сопло; в – труба Вентури; 1 – труба; 2 – сужающее устройство
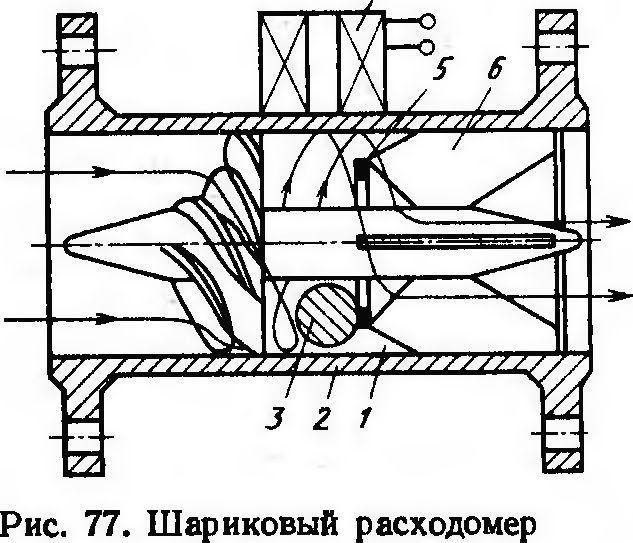
Рис. 77. Шариковый расходомер
Таблица 13
Технические характеристики шариковых расходомеров
|
Тип |
Верхний предел измерения, м2/ч |
Минимальный расход, м2/ч |
|
ШРТ-0,1 |
0,1 |
0,025 |
|
ШРТ-0,16 |
0,16 |
0,04 |
|
ШРТ-0,25 |
0,25 |
0,062 |
|
ШРТ-0,4 |
0,4 |
0,1 |
|
ШРТ-0,6 |
0,6 |
0,15 |
|
ШРТ-1,0 |
1,0 |
0,25 |
|
ШРТ-2,5 |
2,5 |
0,62 |
|
ШРТ-4,0 |
4,0 |
1,00 |
|
ШРТ-6,0 |
6,0 |
1,5 |
|
ШРТ-10,0 |
10,0 |
2,5 |
Расходомеры переменного перепада давления получили наибольшее распространение в литейных и термических цехах.
Расходомеры переменного уровня предназначены для измерения расхода жидкости, находящейся под атмосферным давлением. Принцип действия этих расходомеров основан на зависимости уровня со свободным стоком жидкости от расхода.
Индукционные электромагнитные расходомеры предназначены для контроля расхода жидкостей, удельная электропроводность которых не менее 10-3 см/м. Принцип их действия основан на измерении электродвижущей силы, наводимой в электропроводной жидкости при прохождении ее через магнитное поле. Электродвижущая сила пропорциональна скорости (расходу) потока.
В тахометрических расходомерах основным элементом является крыльчатка, вращающаяся под действием потока с угловой скоростью, пропорциональной скорости потока и, следовательно, расходу.
В последние годы весьма перспективными стали шариковые и турбинные тахометрические расходомеры. Шариковые расходомеры имеют преимущества перед турбинными в простоте конструкции и высокой эксплуатационной надежности.
В шариковом расходомере (рис. 77) в качестве подвижного элемента применен шарик 3, который изготовлен из ферромагнитного материала с пластмассовым покрытием. Под действием закрученного потока шарик совершает планетарное движение, для чего используется направляющий аппарат 1, выполненный в виде многозаходного винта, помещенного в корпусе 2. При выходе из прибора поток успокаивается (сглаживается) струевыпрямителем 6, на крестовине которого закреплено ограничительное кольцо 5, удерживающее шарик. Частота вращения шарика регистрируется индуктивным преобразователем 4, частота наводимых сигналов которого пропорциональна расходу потока, и преобразуется в сигнал постоянного тока 0 ... 5 мА.
Технические характеристики некоторых видов шариковых расходомеров приведены в табл. 13.
3. Счетчики жидкостей и газов
В зависимости от принципа действия счетчики жидкостей и газов делят на скоростные и объемные.
Принцип действия скоростных счетчиков основан на суммировании числа оборотов помещенного в поток вращающегося устройства за какой-либо отрезок времени. По конструкции их подразделяют на счетчики с вертикальной вертушкой и счетчики с винтовой вертушкой. Первые применяют для измерения малых расходов жидкостей, а вторые – для измерения больших расходов.
Скоростной счетчик типа УВК (рис. 78) состоит из двух основных частей: измерителя скорости потока и счетной головки. Счетный механизм отделен от потока контролируемой жидкости специальной перегородкой 3. Под воздействием потока жидкости крыльчатка 5 приводится во вращение. Передача вращения от крыльчатки через редуктор 4 счетному механизму 1 осуществляется с помощью магнитной муфты 2, которая используется для отключения последнего.
К достоинствам скоростных счетчиков с вертикальной крыльчаткой относятся простота конструкции, небольшая потеря давления и низкая чувствительность к загрязнениям. Недостатками этих счетчиков являются нереверсивность действия, приводящая к одностороннему изнашиванию, и необходимость установки счетчика на горизонтальных участках трубопровода. Счетчики с вертикальной вертушкой применяют для измерения количества воды, подаваемой в цехи.

