ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 20.07.2024
Просмотров: 671
Скачиваний: 0

СОДЕРЖАНИЕ
А.Г. Староверов основы автоматизации производства
Глава 1. Общие сведения о системах автоматики и составляющих ее элементах
1. Основные понятия и определения
2. Классификация систем автоматического управления
3. Элементы автоматических систем
Глава 2. Первичные преобразователи
1. Общие сведения и классификация первичных преобразователей
2. Потенциометрические первичные преобразователи
3. Индуктивные первичные преобразователи
4. Емкостные первичные преобразователи
5. Тензометрические первичные преобразователи
6. Фотоэлектрические первичные преобразователи
Глава 3. Усилители и стабилизаторы
2. Электромеханические и магнитные усилители
Глава 4. Переключающие устройства и распределители
3. Контактные аппараты управления
4. Бесконтактные устройства управления
Наименование н обозначение логических функций н элементов
Глава 5. Задающие и исполнительные устройства
1. Классификация задающих и исполнительных устройств
3. Электрические исполнительные механизмы
Раздел II. Контрольно-измерительные приборы и техника измерения параметров технологических процессов
Глава 6. Общие сведения об измерении и контроле
1. Основные метрологические понятия техники измерения и контроля
3. Методы измерения и классификация. Контрольно-измерительных приборов
1. Температурные шкалы. Классификация технических приборов и устройств измерения температуры
Технические характеристики стеклинных ртутных, термометров типа тт
Технические характеристики дилатометрических гермометров
Характеристики манометрических термометров
4. Термоэлектрические термометры
Основные характеристики термоэлектрических термометров
Технические характеристики милливольтметров
5. Термометры сопротивления и термисторы
Технические характеристики термометров сопротивления
6. Бесконтактное измерение температуры
7. Техника безопасности при контроле температуры
Глава 8. Контроль давления и разрежения
1. Общие сведения и классификация приборов
Технические характеристики показывающих и сигнализирующих манометров
Технические характеристики тягомеров, напоромеров и тягонапоромеров
Технические характеристики промышленных вакуумметров
5. Техника безопасности при контроле давления
Глава 9. Контроль расхода, количества и уровня
1. Общие сведения и классификация приборов
Технические характеристики ротаметров
Технические характеристики шариковых расходомеров
Технические характеристики счетчиков жидкостей и газов
4. Счетчики и весы твердых и сыпучих материалов
5. Уровнемеры жидкостей и сыпучих материалов
Технические характеристики поплавковых уровнемеров с пружинным уравновешиванием
Технические характеристики буйковых уровнемеров
6. Техника безопасности при контроле расхода, количества и уровня
Глава 10. Контроль специальных параметров
2. Контроль влажности и запыленности газа
3. Контроь влажности сыпучих материалов
4. Контроль плотности жидкости
5. Техника безопасности при контроле специальных параметров
Раздел III. Автоматическое управление, контроль и регулирование
Глава 11. Системы автоматики с программным управлением
1. Общие принципы построения систем
2. Интуитивный метод разработки схем управления
3. Аналитический метод разработки схем управления
Глава 12. Автоматическая блокировка и защита в системах управления
1. Системы автоматической блокировки
2. Системы автоматической защиты
Глава 13. Системы автоматического контроля и сигнализации
2. Измерительные системы с цифровым отсчетом
3. Системы централизованного контроля
4. Системы автоматической сигнализации
Глава 14. Системы автоматического регулирования
1. Основные понятия и определения
2. Обыкновенные системы регулирования
3. Самонастраивающиеся системы регулирования
4. Качественные показатели автоматического регулирования
Глава 15. Объекты регулирования и их свойства
2. Параметры объектов регулирования
3. Определение основных свойств объектов
1. Классификация автоматических регуляторов
2. Регуляторы прерывистого (дискретного) действия
3. Регуляторы непрерівного действия
4. Выбор типа регуляторов и параметров его настройки
Формулы для определения параметров настройки регуляторов
Глава 17. Конструкции и характеристики регуляторов
1. Регуляторы прямого действия
2. Электрические регуляторы косвенного действия
3. Гидравлические регуляторы косвенного действия
4. Пневматические регуляторы косвенного действия
5. Техника безопасности при эксплуатации регуляторов
Раздел IV. Микропроцессорные системы
Глава 18. Общая характеристика микропроцессорных систем
1. Основные понятия и определения
2. Организация работы вычислительной машины
Глава 19. Математическое и программное обеспечение микроЭвм
2. Правила перевода одной системы счисления в другую
3. Формы представления чисел в эвм. Машинные коды
Глава 20. Внешние устройства микроЭвм
1. Классификация внешних устройств
2. Внешние запоминающие устройства
3. Устройства для связи эвм – оператор
4. Внешние устройства связи эвм с объектом
Глава 21. Применение микропроцессорных систем
1. Состав систем автоматики с применением микроЭвм
2. Управление производственными процессами
Раздел V. Промышленные роботы и роботизированные системы
Глава 22. Общие сведения о промышленных роботах
1. Основные определения и классификация промышленных роботов
2. Структура промышленных роботов
3. Основные технические показатели роботов
Глава 23. Конструкции промышленных роботов
1. Промышленные роботы агрегатно-модульного типа
Технические данные агрегатной гаммы промышленных роботов лм40ц.00.00 [9]
Технические характеристики и области обслуживания типового ряда промышленных роботов [9]
Технические данные модулей агрегатной гаммы рпм-25 [9]
2. Интерактивные промышленные роботы
3. Адаптивные промышленные роботы
5. Приводы промышленных роботов
Глава 24. Системы управления промышленными роботами
1. Назначение и классификация систем управления
2. Унифицированные системы управления
Технические данные унифицированных систем управления уцм [9]
Технические данные унифицированных систем управления упм [9]
Технические данные контурных систем управления укм [9]
Глава 25. Роботизация промышленного производства
1. Основные типы роботизированных систем
2. Гибкие производственные системы с применением промышленных роботов
3. Техника безопасности при эксплуатации роботов
Приложение Буквенные обозначения элементов электрических схем
4. Бесконтактные устройства управления
В предыдущих параграфах рассматривались аппараты управления дискретного действия (реле, кнопки управления, контакторы и др.). Эти аппараты обладают целым рядом недостатков: подвижные части при частом включении сравнительно недолговечны, что вызывает большое число отказов и сбоев в работе. Их время срабатывания заметно влияет на быстродействие всей схемы автоматики, они требуют профилактических осмотров, регулировок или частой замены. В настоящее время наряду с контактными аппаратами используются бесконтактные устройства, обладающие высокими надежностью и быстродействием.
Как правило, бесконтактные устройства не имеют подвижных частей. В процессе работы их электрические цепи не разрываются (отсюда и название «бесконтактные»), а сигналы управления возникают вследствие дискретного изменения параметров составляющих элементов, с нелинейными статическими характеристиками (транзисторы, диоды и т. п.). Эти аппараты управления – транзисторные и магнитные логические элементы и схемы с тиристорами. Бесконтактные устройства более надежны, чем контактные электромеханические аппараты, имеют высокое быстродействие, но более чувствительны к внешним электрическим помехам и воздействию температуры. Влияние указанных недостатков можно значительно снизить правильным построением схем бесконтактных устройств.
Бесконтактные устройства, как и контактные аппараты, обладают дискретным действием, т. е. характеризуются двумя состояниями, соответствующими понятиям «включено» и «выключено». Под состоянием «включено» у бесконтактных устройств понимается состояние, когда на их выходе имеются сигналы с требуемыми параметрами (напряжением или током). Отсутствие напряжения и тока на выходе соответствует состоянию «выключено».
Наиболее распространены в схемах управления логические элементы, на основе которых строится логическая часть системы управления, где в зависимости от входных сигналов появляются соответствующие выходные. Выходные сигналы через усилители поступают на исполнительные устройства.
Бесконтактные схемы могут быть собраны с помощью логических элементов, выполняющих элементарные логические функции И, ИЛИ, НЕ, ПАМЯТЬ, ПОВТОРИТЕЛЬ, ВРЕМЯ или ЗАДЕРЖКА. Бесконтактные логические элементы системы управления выполняют определенный объем смысловых логических операций, но соединять или разрывать какие-либо схемы они не могут. Поэтому применение бесконтактных устройств путем прямой замены контактных аппаратов невозможно.
По сравнению с релейно-контактными схемами число бесконтактных элементов в бесконтактных схемах в несколько раз больше, чем реле.
Бесконтактные элементы классифицируют по виду выполняемой функции. Сложные функции раскладываются в ряд простых, реализуемых с помощью простых элементов, которые осуществляют элементарные функции. Название некоторых элементарных логических функций и элементов, их функции, обозначения, формулы и релейные эквиваленты приведены в табл. 1.
В устройствах автоматики, телемеханики, в системах контроля, сигнализации, измерений и защиты находят широкое применение логические элементы: матричные серии «Логика-М», интегральные серии «Логика-И» и транзисторные серии «Логика-Т». Каждая серия унифицированной системы «Логика» состоит из нескольких типов элементов, выполняющих различные логические и вспомогательные функции. Например, серия «Логика-И» содержит семь логических элементов, при помощи которых можно реализовать различные логические функции.
Логические элементы серии «Логика-Т» изготовляют в виде модулей: транзисторы, диоды, резисторы и другие детали монтируют на гетинаксовых печатных платах, которые размещают затем в пластмассовом корпусе размером 90×19,5×55 мм и заливают компаундом на основе эпоксидной смолы.
Серия «Логика-И» состоит из четырех групп элементов: логических, функциональных, времени и выходных (усилителей). Всего имеется 30 различных элементов. Напряжение питания всех элементов 15 В. Габаритные размеры 70×70×24 мм.
Изображение схем управления с бесконтактными элементами отличается от изображения схем с контактными аппаратами. Электромеханические реле и контакторы обычно имеют одну входную цепь и несколько выходных цепей в виде замыкающих и размыкающих контактов. Бесконтактные элементы имеют несколько входных цепей и только одну или две выходных цепи. Поэтому в релейно-контактных схемах нельзя механически заменить контакты бесконтактными элементами.
Таблица 1
Наименование н обозначение логических функций н элементов
|
Наименование логической функции (элемента) |
Содержание логической функции |
Обозначение элемента |
Релейный эквивалент |
|
И (конъюнктор) |
Сигнал на выходе появляется только при наличии всех сигналов на входе |
|
|
|
ИЛИ (дизъюнктор) |
Сигнал на выходе появляется тогда, когда имеется сигнал хотя бы на одном из входов |
|
|
|
НЕ (инвертор, отрицание) |
При наличии сигнала на входе сигнал на выходе отсутствует, и наоборот |
|
|
|
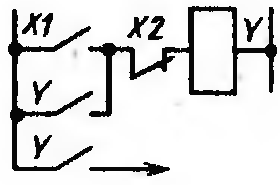
ПАМЯТЬ (двоичный прибор) |
При подаче сигнала на вход, т. е. включения X1, выходной сигнал Y сохраняется до подачи сигнала на вход Х2 (отключение памяти) независимо от последующего состояния входа X1 |
|
|
|
ПОВТОРЕНИЕ (повторитель) |
Сигнал на выходе появляется при наличии сигнала на входе |
|
|
|
ЗАДЕРЖКА (выдержка времени) |
Сигнал на выходе появляется через некоторое время после подачи сигнала на вход и исчезает одновременно с входным сигналом |
|
|
|
И—НЕ (элемент Шеффера) |
Сигнал на выходе отсутствует тогда, когда имеются сигналы на всех входах |
|
|
|
ЗАПРЕТ |
При отсутствии сигнала на входе ЗАПРЕТ X1 сигнал на выходе появляется одновременно с сигналом на входе Х2, а при наличии сигнала на входе X1, сигнал на выходе отсутствует |
|
|
В качестве примера рассмотрим две схемы управления нереверсивным электродвигателем: релейно-контактную (рис. 34, а) и схему, выполненную на бесконтактных элементах (рис. 34, б). При работе по схеме, показанной на рис. 34, а, включение контактора осуществляется кнопкой SВ1 «Пуск», при нажатии на которую замыкаются ее разомкнутый контакт и цепь питания катушки пускателя КМ. Пускатель КМ главными (силовыми) контактами КМ2 (рис. 34, в) подключает двигатель М к сети. При этом ротор двигателя начнет вращаться. С помощью блокировочного контакта КМ1 напряжение на катушке удерживается и после того, как кнопка SВ1 отпущена (ее контакт разомкнется). Для остановки двигателя напряжение с катушки контактора должно быть снято. Это может быть достигнуто нажатием на кнопку SВ2 «Стоп» (размыканием ее контактов) либо размыканием контактов теплового реле КК (последнее срабатывает при длительной перегрузке двигателя).
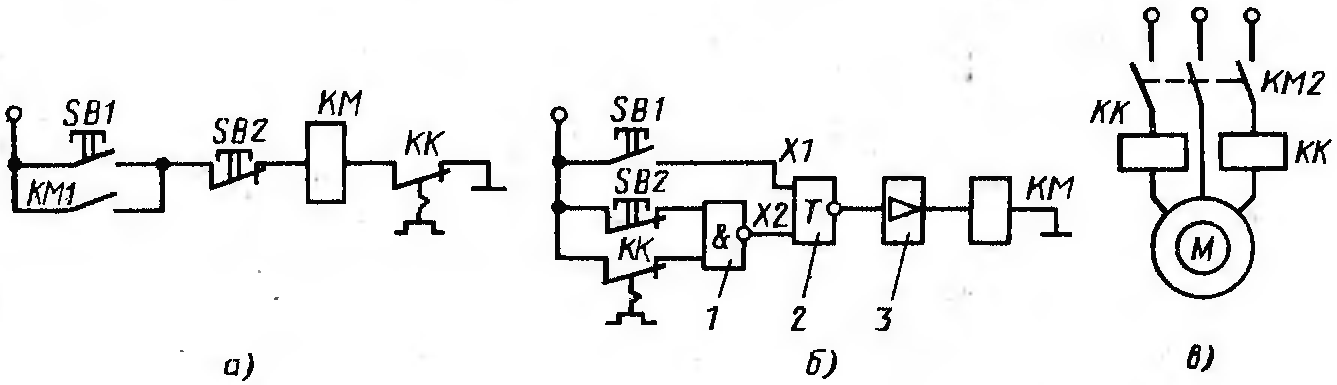
Рис. 34. Схемы управления нереверсивным электроприводом:
а – релейно-контактная; 6 – на бесконтактных элементах; в – силовая схема; 1 элемент И–НЕ; 2 – элемент ПАМЯТЬ; 3 – выходной элемент (усилитель)
При управлении пускателем КМ с использованием логических элементов (рис. 34, б) в исходном состоянии схемы пускатель отключен. При нажатии на кнопку SВ1 возникает сигнал на входе элемента 2. Появившийся сигнал на его выходе поступает на вход элемента 3, к выходу которого подключена катушка пускателя КМ. Под действием выходного напряжения в катушке начинает протекать ток, достаточный для срабатывания пускателя. При отпускании кнопки SВ1 схема остается в работе, гак как элемент 2 «запомнил» входную команду. Снятие выходного сигнала у элемента 2 осуществляется нажатием на кнопку SВ2 или разрывом контакта КК теплового реле. При разрыве хотя бы одной из входных цепей элемента 1 на его выходе появляется сигнал, поступающий на вход Х2, с помощью которого триггер (элемент 2) перебрасывается, и сигнал на его выходе исчезает, что приводит к обесточиванию катушки пускателя. Двигатель М отключается от сети.
Схемы с тиристорами применяют в системах автоматики для бесконтактной коммутации цепей переменного тока (бесконтактные пускатели, ключи и переключатели); для преобразования постоянного тока в переменный (инверторы и преобразователи частоты); для получения различных режимов работы электроприводов.

