ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 20.07.2024
Просмотров: 674
Скачиваний: 0

СОДЕРЖАНИЕ
А.Г. Староверов основы автоматизации производства
Глава 1. Общие сведения о системах автоматики и составляющих ее элементах
1. Основные понятия и определения
2. Классификация систем автоматического управления
3. Элементы автоматических систем
Глава 2. Первичные преобразователи
1. Общие сведения и классификация первичных преобразователей
2. Потенциометрические первичные преобразователи
3. Индуктивные первичные преобразователи
4. Емкостные первичные преобразователи
5. Тензометрические первичные преобразователи
6. Фотоэлектрические первичные преобразователи
Глава 3. Усилители и стабилизаторы
2. Электромеханические и магнитные усилители
Глава 4. Переключающие устройства и распределители
3. Контактные аппараты управления
4. Бесконтактные устройства управления
Наименование н обозначение логических функций н элементов
Глава 5. Задающие и исполнительные устройства
1. Классификация задающих и исполнительных устройств
3. Электрические исполнительные механизмы
Раздел II. Контрольно-измерительные приборы и техника измерения параметров технологических процессов
Глава 6. Общие сведения об измерении и контроле
1. Основные метрологические понятия техники измерения и контроля
3. Методы измерения и классификация. Контрольно-измерительных приборов
1. Температурные шкалы. Классификация технических приборов и устройств измерения температуры
Технические характеристики стеклинных ртутных, термометров типа тт
Технические характеристики дилатометрических гермометров
Характеристики манометрических термометров
4. Термоэлектрические термометры
Основные характеристики термоэлектрических термометров
Технические характеристики милливольтметров
5. Термометры сопротивления и термисторы
Технические характеристики термометров сопротивления
6. Бесконтактное измерение температуры
7. Техника безопасности при контроле температуры
Глава 8. Контроль давления и разрежения
1. Общие сведения и классификация приборов
Технические характеристики показывающих и сигнализирующих манометров
Технические характеристики тягомеров, напоромеров и тягонапоромеров
Технические характеристики промышленных вакуумметров
5. Техника безопасности при контроле давления
Глава 9. Контроль расхода, количества и уровня
1. Общие сведения и классификация приборов
Технические характеристики ротаметров
Технические характеристики шариковых расходомеров
Технические характеристики счетчиков жидкостей и газов
4. Счетчики и весы твердых и сыпучих материалов
5. Уровнемеры жидкостей и сыпучих материалов
Технические характеристики поплавковых уровнемеров с пружинным уравновешиванием
Технические характеристики буйковых уровнемеров
6. Техника безопасности при контроле расхода, количества и уровня
Глава 10. Контроль специальных параметров
2. Контроль влажности и запыленности газа
3. Контроь влажности сыпучих материалов
4. Контроль плотности жидкости
5. Техника безопасности при контроле специальных параметров
Раздел III. Автоматическое управление, контроль и регулирование
Глава 11. Системы автоматики с программным управлением
1. Общие принципы построения систем
2. Интуитивный метод разработки схем управления
3. Аналитический метод разработки схем управления
Глава 12. Автоматическая блокировка и защита в системах управления
1. Системы автоматической блокировки
2. Системы автоматической защиты
Глава 13. Системы автоматического контроля и сигнализации
2. Измерительные системы с цифровым отсчетом
3. Системы централизованного контроля
4. Системы автоматической сигнализации
Глава 14. Системы автоматического регулирования
1. Основные понятия и определения
2. Обыкновенные системы регулирования
3. Самонастраивающиеся системы регулирования
4. Качественные показатели автоматического регулирования
Глава 15. Объекты регулирования и их свойства
2. Параметры объектов регулирования
3. Определение основных свойств объектов
1. Классификация автоматических регуляторов
2. Регуляторы прерывистого (дискретного) действия
3. Регуляторы непрерівного действия
4. Выбор типа регуляторов и параметров его настройки
Формулы для определения параметров настройки регуляторов
Глава 17. Конструкции и характеристики регуляторов
1. Регуляторы прямого действия
2. Электрические регуляторы косвенного действия
3. Гидравлические регуляторы косвенного действия
4. Пневматические регуляторы косвенного действия
5. Техника безопасности при эксплуатации регуляторов
Раздел IV. Микропроцессорные системы
Глава 18. Общая характеристика микропроцессорных систем
1. Основные понятия и определения
2. Организация работы вычислительной машины
Глава 19. Математическое и программное обеспечение микроЭвм
2. Правила перевода одной системы счисления в другую
3. Формы представления чисел в эвм. Машинные коды
Глава 20. Внешние устройства микроЭвм
1. Классификация внешних устройств
2. Внешние запоминающие устройства
3. Устройства для связи эвм – оператор
4. Внешние устройства связи эвм с объектом
Глава 21. Применение микропроцессорных систем
1. Состав систем автоматики с применением микроЭвм
2. Управление производственными процессами
Раздел V. Промышленные роботы и роботизированные системы
Глава 22. Общие сведения о промышленных роботах
1. Основные определения и классификация промышленных роботов
2. Структура промышленных роботов
3. Основные технические показатели роботов
Глава 23. Конструкции промышленных роботов
1. Промышленные роботы агрегатно-модульного типа
Технические данные агрегатной гаммы промышленных роботов лм40ц.00.00 [9]
Технические характеристики и области обслуживания типового ряда промышленных роботов [9]
Технические данные модулей агрегатной гаммы рпм-25 [9]
2. Интерактивные промышленные роботы
3. Адаптивные промышленные роботы
5. Приводы промышленных роботов
Глава 24. Системы управления промышленными роботами
1. Назначение и классификация систем управления
2. Унифицированные системы управления
Технические данные унифицированных систем управления уцм [9]
Технические данные унифицированных систем управления упм [9]
Технические данные контурных систем управления укм [9]
Глава 25. Роботизация промышленного производства
1. Основные типы роботизированных систем
2. Гибкие производственные системы с применением промышленных роботов
3. Техника безопасности при эксплуатации роботов
Приложение Буквенные обозначения элементов электрических схем
2. Электромеханические и магнитные усилители
Электромеханические усилители выполняют в виде электромашинных усилителей (ЭМУ) или электромагнитных реле.
Электромашинные усилители – специальные электрические генераторы постоянного тока, выходная мощность которых регулируется путем изменения мощности управления. Конструктивно электромашинные усилители выполняют в виде установки, в корпусе которой располагаются асинхронный электродвигатель и генератор.
Электромашинные усилители допускают значительные форсировки по току и по напряжению, имеют малую мощность управления и хорошее быстродействие.
Однако электромашинные усилители имеют невысокую надежность из-за наличия подвижных контактов между щетками и коллектором, создают большие помехи для работы радиоаппаратуры, имеют относительно большие размеры и массу.
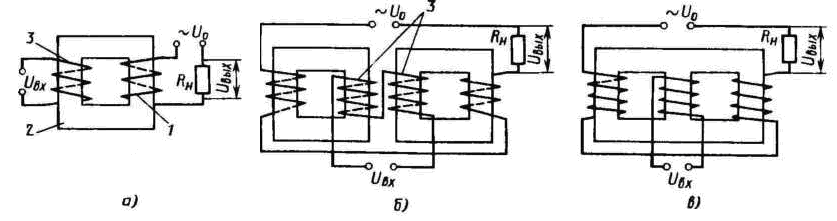
Рис. 13. Схемы магнитных усилителей дроссельного типа:
а – простейшего, б – на двух магнитопроводах, в – на одном Ш-образном магнитопроводе
В электромагнитных реле получаемый управляющий сигнал подают на катушку, в результате чего замыкаются контакты, способные пропускать ток большей мощности. Усилители подобного типа позволяют увеличивать энергию входного сигнала в 1000 раз, существенно упростить схему управления и повысить ее стабильность по отношению к изменениям температуры окружающей среды. Они получили широкое распространение в системах автоматического регулирования (стабилизации) температуры термических и плавильных печей.
Магнитные усилители представляют собой электромагнитное устройство, в котором связь выхода и входа осуществляется через магнитное поле. В основу принципа его действия положена нелинейная зависимость магнитной проницаемости ферромагнитных материалов от напряженности постоянного подмагничивающего поля, созданного или изменяемого входным сигналом.
Магнитные усилители подразделяют на простые и с самонасыщением. У первых по рабочим обмоткам протекает только переменный ток, а в усилителях второй группы по рабочим обмоткам протекает ток, содержащий постоянную составляющую.
Основными параметрами магнитных усилителей являются характеристики управления, т. е. взаимосвязь между установившимися значениями входной и выходной величин, например между рабочим током нагрузки и током управления.
Простейший магнитный усилитель – усилитель дроссельного типа (рис. 13, а). Он представляет собой катушку индуктивности 1 с ферромагнитным магнитопроводом 2 и дополнительной управляющей обмоткой 3. Нагрузка усилителя Rн включена последовательно с рабочей обмоткой, питание которой осуществляется переменным током U0.
При изменении входного напряжения Uвх будет изменяться подмагничивающее постоянное поле и магнитная проницаемость ферромагнитного магнитопровода, а следовательно, и индуктивность рабочей обмотки. В результате будет меняться ток выходной цепи.
Таким образом, устройство магнитных усилителей основано на использовании непостоянства магнитной проницаемости ферромагнетика, т. е. нелинейности индуктивного сопротивления дросселя.
Входное напряжение Uвх может меняться не только по амплитуде, но и по знаку. Необходимо лишь, чтобы частота входного напряжения была значительно (в 5–10 раз) меньше частоты источника питания U0. Тогда интенсивность входного сигнала будет определять амплитуду тока в цепи нагрузки и изменение входного сигнала во времени будет соответствовать изменению огибающих этих амплитуд. Таким образом, магнитный усилитель одновременно является модулятором, преобразующим сколь угодно медленно меняющееся напряжение на входе в изменения огибающих выходного напряжения.
Рассмотренная простейшая схема дроссельного магнитного усилителя практически не применяется, так как переменный ток, протекающий по рабочей обмотке, наводит ЭДС в управляющей обмотке. Наведенный ток попадает в цепь датчика сигнала и искажает его характеристику.
Отмеченный недостаток устраняется, если применить схему (рис. 13, б) с двумя магнитно не связанными между собой дросселями, обмотки которых соединены так, как показано на рисунке. Если входная обмотка 3 намагничивает оба магнитопровода в одном направлении, то выходная обмотка – в разных. Благодаря этому взаимно компенсируются ЭДС, наведенные во входных обмотках.
Трехстержневая схема магнитопровода приведена на рис. 13, в. В этом случае во входной обмотке также не будет наводиться ЭДС трансформации, так как соответствующие составляющие переменного потока взаимно уничтожаются и будут отсутствовать в среднем стержне. Рассмотренная схема находит применение благодаря удобству изготовления и возможности размещения большого числа витков.
С повышением частоты источника питания размеры магнитных усилителей уменьшаются, но одновременно растут потери в ферромагнетике и увеличивается магнитный поверхностный эффект.
В целом магнитные усилители являются надежными элементами автоматики, к достоинствам которых следует отнести высокую прочность при практически неограниченном сроке службы, а также в отличие от электронных ламповых усилителей мгновенную готовность к действию. Удобно и суммирование сигналов в магнитном усилителе, для этого достаточно иметь соответствующее число входных обмоток. Магнитные усилители нечувствительны к радиоактивным излучениям. Недостатки магнитных усилителей – сравнительно большая масса и значительная инерционность, обусловленная заметным количеством энергии, запасаемой в магнитном поле дросселя.
3. Электронные усилители
К электронным ламповым и полупроводниковым усилителям относятся устройства систем автоматики, в которых используются многоэлектродные лампы или полупроводниковые приборы, значение активного сопротивления которых зависит от интенсивности или полярности электрического поля.
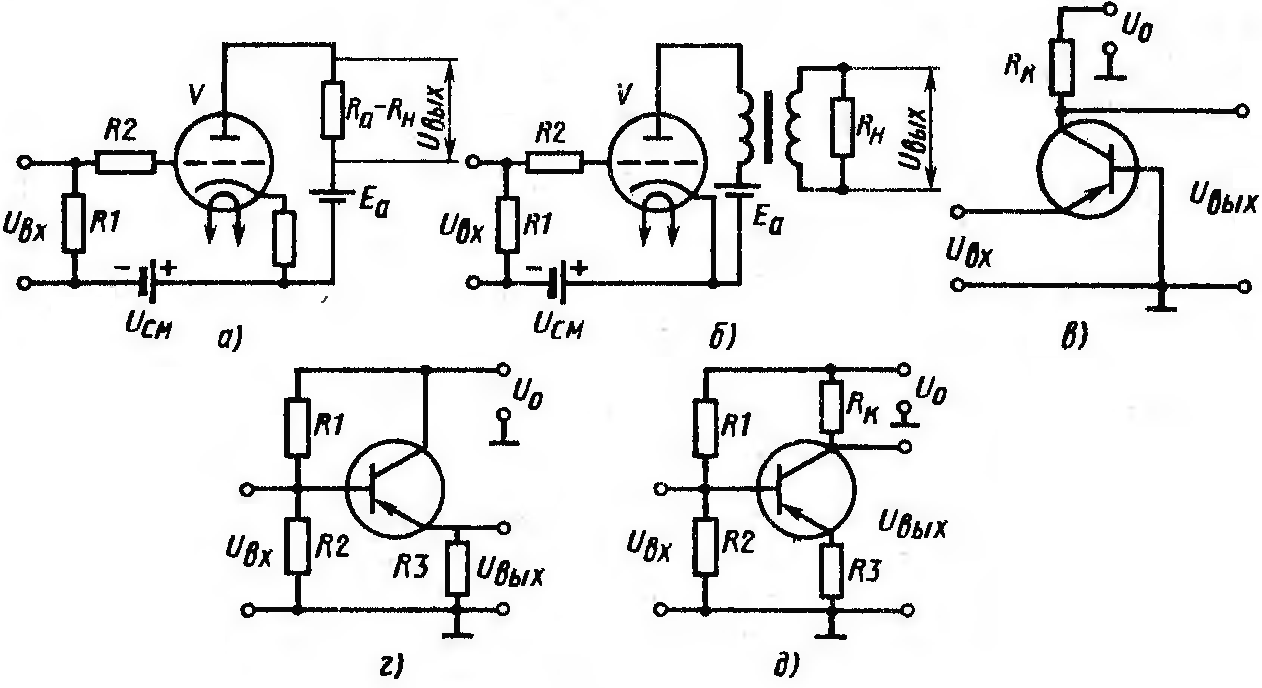
Рис. 14. Схемы электронных усилителей:
а – электровакуумных постоянного тока; б – переменного тока; в – полупроводниковых с общей базой; г – с общим коллектором; д – с общим эмиттером
Элемент усилителя, состоящий из электронной лампы или полупроводника с резисторами и конденсаторами, называют усилительным каскадом. Если для усиления входного сигнала одного каскада недостаточно, то применяют последовательное соединение нескольких каскадов. В этом случае первые каскады выполняют роль предварительного усиления, обеспечивая работу мощного выходного каскада. Различают однокаскадные и многокаскадные усилители.
Схема простейшего однокаскадного усилителя на электронной лампе показана на рис. 14, а. Входной сигнал Uвх подается на сетку электронной лампы V, в анодную цепь которой включен резистор (нагрузка) Rа = Rн. При изменении значения Uвх будет меняться значение анодного тока Iа, а следовательно, и значение выходного напряжения Uвых, равного падению напряжения на нагрузочном (анодном), резисторе Rн от протекания анодного тока. В этом и заключается усилительный эффект. Резистор R1 служит для ограничения сеточных токов. Резистор R2 введен для стабилизации выходного сопротивления усилителя. Рассмотренная схема является нереверсивной.
Схема простейшего усилителя переменного тока с трансформаторным выходом (рис. 14, б) отличается от схемы усилителя постоянного тока только тем, что нагрузочный резистор Rн не является одновременно анодным резистором Ra а включен в анодную цепь через трансформатор, благодаря чему выходное напряжение Uвых содержит лишь переменную составляющую.
Применяемые в системах автоматики усилители на вакуумных лампах, в большинстве случаев миниатюрного (пальчикового) типа, выгодно отличаются от прочих видов усилителей ничтожно малой входной мощностью и незначительной инерционностью. Недостатком электронных ламповых усилителей являются низкий КПД и небольшая выходная мощность, а также ограниченные надежность и срок службы. Они широко используются в системах автоматики для предварительного усиления сигналов, полученных от преобразователей. Предельная выходная мощность не превышает 100 Вт.
Для построения полупроводниковых усилителей в качестве управляющих устройств используют полупроводниковые триоды (транзисторы), изготовляемые из германия или кремния с соответствующими примесями.
Транзисторы могут включаться в усилительные схемы тремя различными способами: с обшей базой, с общим коллектором и общим эмиттером.
Схема полупроводникового усилителя с общей базой (рис. 14, в) соответствует редко применяемой в автоматике схеме электронного усилителя с общей сеткой. В этих усилителях электрод базы является общим для входной и выходной цепей. Выходное напряжение находится в фазе с входным. Коэффициент усиления по току меньше единицы, а по напряжению много больше единицы. Усилители, построенные по такому принципу, используют в качестве входного каскада по отношению к преобразователю с низким выходным сопротивлением.
В полупроводниковом усилителе с общим коллектором (рис. 14, г) коэффициент усиления по току на много больше единицы, а по напряжению – меньше единицы. Резисторы R1 и R2 составляют делитель напряжения, с которого снимается напряжение смещения. Усилители, построенные по такой схеме, применяют в качестве первого каскада усиления для согласования включения преобразователя с высокоомным выходом или в качестве выходного каскада при работе с низкоомной нагрузкой.
Схема с общим эмиттером (рис. 14, д) соответствует наиболее распространенной схеме электронного усилителя с общим катодом. В схеме резистор Rн является нагрузочным в цепи коллектора, а резисторы R1 и R2 образуют делитель напряжения, с которого снимается напряжение смещения. Схема с общим эмиттером получила наибольшее практическое применение. Она обеспечивает высокий коэффициент усиления по мощности и току и имеет сравнительно большое входное сопротивление.
В настоящее время транзисторные усилители вытесняют ламповые усилители из многих сфер применения. Это объясняется тем, что срок службы транзисторов составляет несколько десятков тысяч часов, а аварийные выходы транзисторов при соответствующем температурном режиме весьма редки.
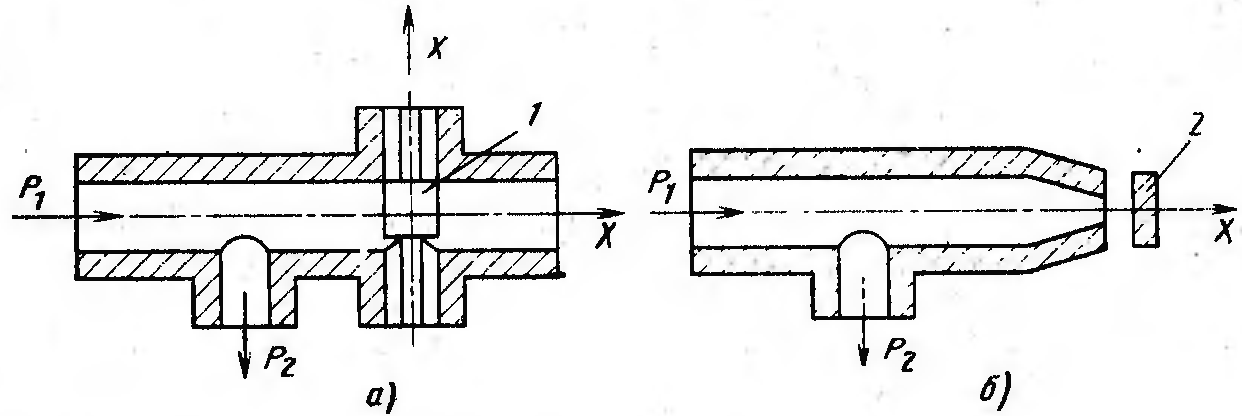
Рис. 15. Схемы пневматических усилителей дроссельного типа:
а – с дросселем; б – с соплом-заслонкой
Гидравлические и пневматические усилители применяются в системах автоматики для усиления сигналов по мощности. Принципиально схемы таких усилителей не имеют различия. Если в пневматических усилителях используется сжатый воздух, то в гидравлическом усилителе – жидкость под давлением (чаще масло).

