ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 20.07.2024
Просмотров: 620
Скачиваний: 0

СОДЕРЖАНИЕ
А.Г. Староверов основы автоматизации производства
Глава 1. Общие сведения о системах автоматики и составляющих ее элементах
1. Основные понятия и определения
2. Классификация систем автоматического управления
3. Элементы автоматических систем
Глава 2. Первичные преобразователи
1. Общие сведения и классификация первичных преобразователей
2. Потенциометрические первичные преобразователи
3. Индуктивные первичные преобразователи
4. Емкостные первичные преобразователи
5. Тензометрические первичные преобразователи
6. Фотоэлектрические первичные преобразователи
Глава 3. Усилители и стабилизаторы
2. Электромеханические и магнитные усилители
Глава 4. Переключающие устройства и распределители
3. Контактные аппараты управления
4. Бесконтактные устройства управления
Наименование н обозначение логических функций н элементов
Глава 5. Задающие и исполнительные устройства
1. Классификация задающих и исполнительных устройств
3. Электрические исполнительные механизмы
Раздел II. Контрольно-измерительные приборы и техника измерения параметров технологических процессов
Глава 6. Общие сведения об измерении и контроле
1. Основные метрологические понятия техники измерения и контроля
3. Методы измерения и классификация. Контрольно-измерительных приборов
1. Температурные шкалы. Классификация технических приборов и устройств измерения температуры
Технические характеристики стеклинных ртутных, термометров типа тт
Технические характеристики дилатометрических гермометров
Характеристики манометрических термометров
4. Термоэлектрические термометры
Основные характеристики термоэлектрических термометров
Технические характеристики милливольтметров
5. Термометры сопротивления и термисторы
Технические характеристики термометров сопротивления
6. Бесконтактное измерение температуры
7. Техника безопасности при контроле температуры
Глава 8. Контроль давления и разрежения
1. Общие сведения и классификация приборов
Технические характеристики показывающих и сигнализирующих манометров
Технические характеристики тягомеров, напоромеров и тягонапоромеров
Технические характеристики промышленных вакуумметров
5. Техника безопасности при контроле давления
Глава 9. Контроль расхода, количества и уровня
1. Общие сведения и классификация приборов
Технические характеристики ротаметров
Технические характеристики шариковых расходомеров
Технические характеристики счетчиков жидкостей и газов
4. Счетчики и весы твердых и сыпучих материалов
5. Уровнемеры жидкостей и сыпучих материалов
Технические характеристики поплавковых уровнемеров с пружинным уравновешиванием
Технические характеристики буйковых уровнемеров
6. Техника безопасности при контроле расхода, количества и уровня
Глава 10. Контроль специальных параметров
2. Контроль влажности и запыленности газа
3. Контроь влажности сыпучих материалов
4. Контроль плотности жидкости
5. Техника безопасности при контроле специальных параметров
Раздел III. Автоматическое управление, контроль и регулирование
Глава 11. Системы автоматики с программным управлением
1. Общие принципы построения систем
2. Интуитивный метод разработки схем управления
3. Аналитический метод разработки схем управления
Глава 12. Автоматическая блокировка и защита в системах управления
1. Системы автоматической блокировки
2. Системы автоматической защиты
Глава 13. Системы автоматического контроля и сигнализации
2. Измерительные системы с цифровым отсчетом
3. Системы централизованного контроля
4. Системы автоматической сигнализации
Глава 14. Системы автоматического регулирования
1. Основные понятия и определения
2. Обыкновенные системы регулирования
3. Самонастраивающиеся системы регулирования
4. Качественные показатели автоматического регулирования
Глава 15. Объекты регулирования и их свойства
2. Параметры объектов регулирования
3. Определение основных свойств объектов
1. Классификация автоматических регуляторов
2. Регуляторы прерывистого (дискретного) действия
3. Регуляторы непрерівного действия
4. Выбор типа регуляторов и параметров его настройки
Формулы для определения параметров настройки регуляторов
Глава 17. Конструкции и характеристики регуляторов
1. Регуляторы прямого действия
2. Электрические регуляторы косвенного действия
3. Гидравлические регуляторы косвенного действия
4. Пневматические регуляторы косвенного действия
5. Техника безопасности при эксплуатации регуляторов
Раздел IV. Микропроцессорные системы
Глава 18. Общая характеристика микропроцессорных систем
1. Основные понятия и определения
2. Организация работы вычислительной машины
Глава 19. Математическое и программное обеспечение микроЭвм
2. Правила перевода одной системы счисления в другую
3. Формы представления чисел в эвм. Машинные коды
Глава 20. Внешние устройства микроЭвм
1. Классификация внешних устройств
2. Внешние запоминающие устройства
3. Устройства для связи эвм – оператор
4. Внешние устройства связи эвм с объектом
Глава 21. Применение микропроцессорных систем
1. Состав систем автоматики с применением микроЭвм
2. Управление производственными процессами
Раздел V. Промышленные роботы и роботизированные системы
Глава 22. Общие сведения о промышленных роботах
1. Основные определения и классификация промышленных роботов
2. Структура промышленных роботов
3. Основные технические показатели роботов
Глава 23. Конструкции промышленных роботов
1. Промышленные роботы агрегатно-модульного типа
Технические данные агрегатной гаммы промышленных роботов лм40ц.00.00 [9]
Технические характеристики и области обслуживания типового ряда промышленных роботов [9]
Технические данные модулей агрегатной гаммы рпм-25 [9]
2. Интерактивные промышленные роботы
3. Адаптивные промышленные роботы
5. Приводы промышленных роботов
Глава 24. Системы управления промышленными роботами
1. Назначение и классификация систем управления
2. Унифицированные системы управления
Технические данные унифицированных систем управления уцм [9]
Технические данные унифицированных систем управления упм [9]
Технические данные контурных систем управления укм [9]
Глава 25. Роботизация промышленного производства
1. Основные типы роботизированных систем
2. Гибкие производственные системы с применением промышленных роботов
3. Техника безопасности при эксплуатации роботов
Приложение Буквенные обозначения элементов электрических схем
Глава 19. Математическое и программное обеспечение микроЭвм
1. Системы счисления
Системой счисления называют совокупность правил представления чисел с помощью различных цифровых знаков. Системы счисления подразделяются на два типа: непозиционные и позиционные.
В непозиционных системах счисления значение любой цифры не зависит от занимаемой ею позиции, т. е. от занимаемого места в совокупности цифр. В римской системе счисления имеется всего семь цифр: единица (I), пять (V), десять (X), пятьдесят (L), сто (С), пятьсот (D), тысяча (М). С помощью этих чисел (символов) остальные числа записываются с применением сложения и вычитания. Например, IV есть запись числа 4 (V–I), VI – числа 6 (V + I) и т. д. Число 666 записывается в римской системе так: DCLXVI.
Эта форма записи менее удобна, чем та, которой мы пользуемся в настоящее время. Здесь шесть единиц записываются одним символом (VI), шесть десятков – другим (LX), шесть сотен – третьим (DC). С числами, записываемыми в римской системе счисления, очень трудно производить арифметические действия.
Также общим недостатком непозиционных систем является сложность представления в них достаточно больших чисел, так при этом получается чрезвычайно громоздкая запись.
Теперь рассмотрим то же число 666 в позиционной системе счисления. В нем один знак 6 обозначает число единиц, если он находится на последнем месте, число десятков – если на предпоследнем, и число сотен, если он стоит на третьем месте от конца. Такой принцип записи чисел называется позиционным (поместным). При такой записи каждая цифра получает числовое значение не только в зависимости от своего начертания, но и от того, на каком месте она стоит при записи числа.
В позиционной системе счисления любое число, изображенное в виде А = +a1a2a3...аn-1аn, может быть представлено в виде суммы
А = а1dт-1 + а2dт-2 + ... + аndт-n+1 + аndт-n,
где n – конечное количество разрядов в изображении числа; ai – цифра i-гo разряда; d – основание системы счисления; i – порядковый номер разряда; dm-l – «вес» i-гo разряда. Цифры ai должны удовлетворять неравенству 0 ≤ a ≤ (d – 1).
Для десятичной системы счисления d = 10 и at = 0; 1; 2; 3; 4; 5; 6; 7; 8; 9.
Так как цифры, состоящие из единиц и нулей, могут восприниматься как десятичные или двоичные числа, то при их совместном применении обычно указывается основание системы счисления, например (1100)2 – двоичная система, (1100)10 – десятичная.
В цифровых ЭВМ широко применяются системы, отличные от десятичной: двоичная, восьмеричная и шестнадцатеричная.
Двоичная система счисления. Для этой системы d = 2, и здесь допускается существование только двух цифр, т. е. ai = 0 или 1.
Любое число, выраженное в двоичной системе, представляется в виде суммы произведения степеней основания два, умноженных на двоичную цифру данного разряда. Например, число 101,01 можно записать так: 101,01 = 1×22 + 0×21 + 1×20 + 0×2‑1 + 1×2-2, что соответствует числу в десятичной системе: 4 + 1 + 0,25 = 5,25.
В большинстве современных цифровых ЭВМ двоичную систему счисления используют для представления чисел в машине и выполнения над ними арифметических операций.
Двоичная система счисления по сравнению с десятичной позволяет упростить схемы и конструкции арифметического и запоминающего устройства, повысить надежность ЭВМ. Цифра каждого разряда двоичного числа представляется состояниями «включено-выключено» таких элементов, как транзисторы, диоды, магнитные сердечники, которые надежно работают в состояниях «включено-выключено».
К недостаткам двоичной системы относится необходимость перевода по специальной программе исходных цифровых данных в двоичную систему счисления, а результатов решения – в десятичную.
Восьмеричная система счисления. Эта система имеет основание d = 8. Для изображения чисел используются цифры: 0; 1; 2; 3; 4; 5; 6; 7.
Восьмеричную систему счисления используют в ЭВМ как вспомогательную при подготовке задач к решению (в процессе программирования), при проверке работы машины и отладке программы. Эта система дает более короткую запись числа по сравнению с двоичной системой. Восьмеричная система счисления позволяет просто перейти к двоичной системе.
Шестнадцатеричная система счисления. Эта система имеет основание d = 16. Для изображения чисел используется 16 знаков: 0; 1; 2; 3; 4; 5; 6; 7; 8; 9; А; В; С; D; Е; F; причем знаки А ... F изображают десятичные числа 10; 11; 12; 13; 14 и 15. Шестнадцатеричное число (lD4F)le будет соответствовать десятичному 7503, так как (1D4F)16 = 1×163 + 13×162 + 4×161 + 15×160 = (7503)10.
Шестнадцатеричная система счисления позволяет более компактно записывать двоичные цифры по сравнению с их записью в восьмеричной системе счисления. Она находит применение в устройствах ввода и вывода и устройствах изображения порядков чисел некоторых ЭВМ.
Двоично-десятичная система счисления. Представление числа в двоично-десятичной системе осуществляется следующим образом. За основу берут десятичную запись числа, а затем каждую ее цифру (от 0 до 9) записывают в виде четырехразрядного двоичного числа, называемого тетрадой, т. е. для изображения каждой цифры десятичной системы применяют не один знак, а четыре.
Например, десятичное число 647,59 будет соответствовать двоично-десятичному числу 0110 0100 0111, 0101 1001.
Двоично-десятичная система счисления используется как промежуточная система счисления и для кодирования входных и выходных чисел.
2. Правила перевода одной системы счисления в другую
Обмен информацией между устройствами ЭВМ производится в основном числами, представленными в двоичной системе счисления. Однако пользователю информация выдается числами в десятичной системе счисления, а адресация команд представляется в восьмеричной системе счисления. Отсюда возникает необходимость в процессе работы ЭВМ переводить числа из одной системы в другую. Для этого пользуются следующим общим правилом.
Чтобы перевести целое число из любой системы счисления в другую, необходимо последовательно делить это число на основание новой системы до тех пор, пока не получится частное, меньшее делителя. Число в новой системе следует записывать в виде остатков деления, начиная с последнего, т. е. справа налево.
Например, переведем десятичное число 1987 в двоичную систему счисления:
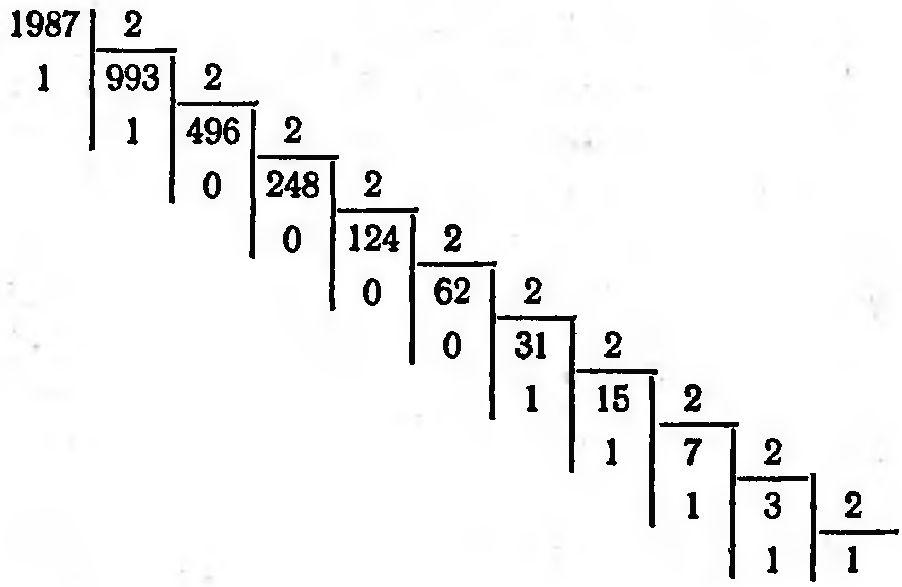
Число 1987 десятичной системы в двоичной системе составит 11111000011, т. е. (1987)10 = (11111000011)а.
При переходе от какой-либо системы к десятичной число представляют в виде суммы степеней основания с соответствующими коэффициентами, а затем подсчитывают значение суммы.
Например, переведем восьмеричное число 123 в десятичное: (123)8 = 1·82 + 2·81 + 3·80 = 64 + 16 + 3 = 83, т. е. (123)8 = (83)10.
Для перевода дробной части числа из любой системы в другую надо провести последовательное умножение этой дроби и получающихся дробных частей произведения на основание новой системы счисления. Дробная часть числа в новой системе формируется в виде целых частей получающихся произведений, начиная с первого. Процесс умножения продолжают до тех пор, пока не будет вычислено число с заданной точностью.
Например, переведем десятичную дробь 0,65625 в двоичную систему счисления:
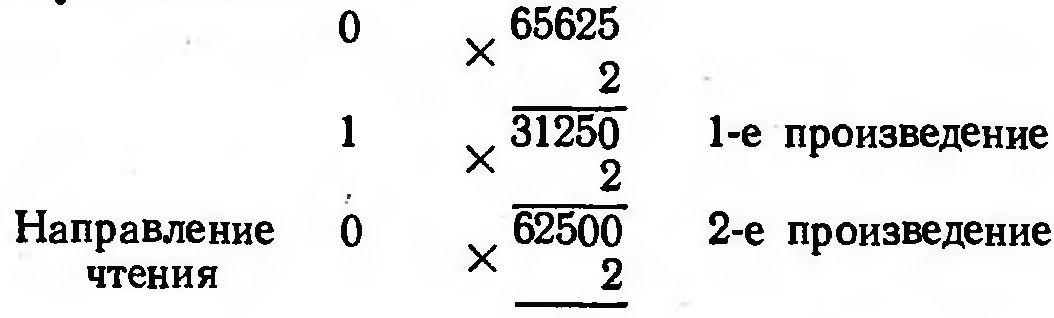
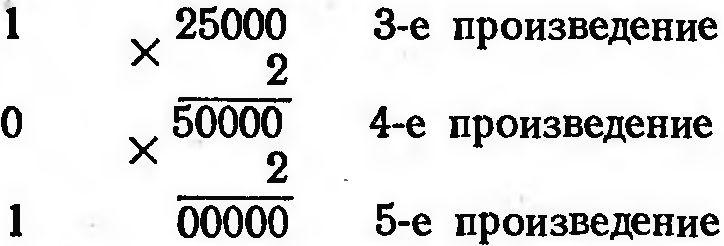
Так как дробная часть 5-го произведения состоит из одних нулей, то дальнейшее умножение является излишним. Это означает, что заданная десятичная дробь переводится в двоичную систему без погрешности, т. е. (0,65625)10 = (0,10101)2.
Перевод из восьмеричной и шестнадцатеричной систем исчисления в двоичную и обратно не сложен. Это объясняется тем, что их основания (d = 8 и d = 16) соответствуют целым степеням двух (28 = 8 и 24 = 16).
Для перевода восьмеричных или шестнадцатеричных. чисел в двоичную систему счисления достаточно каждую их цифру заменить соответственно трех или четырехразрядным двоичным числом.
Например, переведем восьмеричное число (571)8 и шестнадцатеричное число (179)16 в двоичную систему счисления.
В обоих случаях получаем одинаковый результат, т. е. (571)8 = (179)1в = (101111001).
Для перевода числа из двоично-десятичной системы счисления в десятичную необходимо каждую тетраду числа, представленную в двоично-десятичной системе счисления, заменить цифрой, представленной в десятичной системе счисления.
Например, запишем число (0010 0001 1000, 0110 0001 0110)2-10 в десятичной системе счисления, т. е.
(0010 0001 1000, ,0110 0001 0110)2-10 = (218,625)10.
3. Формы представления чисел в эвм. Машинные коды
Существуют две основные формы представления чисел в вычислительной машине: естественная (с фиксированной запятой) и нормальная (с плавающей запятой). В зависимости от этого ЭВМ также подразделяются на две группы: вычислительные машины, работающие с числами с фиксированной запятой, и машины, работающие с числами с плавающей запятой.
Естественная форма записи. Число представляют в виде последовательности двоичных цифр, разделенных запятой на целую и дробную части. Запятая фиксируется перед старшим цифровым разрядом. Это обеспечивает гарантию того, что в процессе умножения произведение никогда не может получится больше единицы. Каждую двоичную цифру записывают в строго определенном разряде. Специальный разряд отводят для представления знака числа. Если это число положительное, то в знаковом разряде записывается, нуль, если отрицательное число – единица.
![]()
В современных ЭВМ (типа СМ) запятую фиксируют справа от самого младшего разряда и таким образом все числа представляют целыми.
В разрядной сетке ЭВМ, работающих с числами с фиксированной запятой, для представления числа помимо знакового разряда выделяют n двоичных разрядов. «Вес» каждого разряда изменяется от минимального значения (2–n) до максимального (–2–1). Следовательно, числа могут быть представлены от минимального отрицательного числа (Аmin)2 = 1,11 ... 1 до максимального положительного (Аmax)2 = 0,11 ... 1. Для представления чисел с фиксированной запятой, которые не укладываются в диапазоне от Аmin до Ашах, используют масштабные коэффициенты. С их помощью исходные, промежуточные и конечные результаты умножения на масштабные коэффициенты должны находиться в заданном диапазоне.

