ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 20.07.2024
Просмотров: 591
Скачиваний: 0

СОДЕРЖАНИЕ
А.Г. Староверов основы автоматизации производства
Глава 1. Общие сведения о системах автоматики и составляющих ее элементах
1. Основные понятия и определения
2. Классификация систем автоматического управления
3. Элементы автоматических систем
Глава 2. Первичные преобразователи
1. Общие сведения и классификация первичных преобразователей
2. Потенциометрические первичные преобразователи
3. Индуктивные первичные преобразователи
4. Емкостные первичные преобразователи
5. Тензометрические первичные преобразователи
6. Фотоэлектрические первичные преобразователи
Глава 3. Усилители и стабилизаторы
2. Электромеханические и магнитные усилители
Глава 4. Переключающие устройства и распределители
3. Контактные аппараты управления
4. Бесконтактные устройства управления
Наименование н обозначение логических функций н элементов
Глава 5. Задающие и исполнительные устройства
1. Классификация задающих и исполнительных устройств
3. Электрические исполнительные механизмы
Раздел II. Контрольно-измерительные приборы и техника измерения параметров технологических процессов
Глава 6. Общие сведения об измерении и контроле
1. Основные метрологические понятия техники измерения и контроля
3. Методы измерения и классификация. Контрольно-измерительных приборов
1. Температурные шкалы. Классификация технических приборов и устройств измерения температуры
Технические характеристики стеклинных ртутных, термометров типа тт
Технические характеристики дилатометрических гермометров
Характеристики манометрических термометров
4. Термоэлектрические термометры
Основные характеристики термоэлектрических термометров
Технические характеристики милливольтметров
5. Термометры сопротивления и термисторы
Технические характеристики термометров сопротивления
6. Бесконтактное измерение температуры
7. Техника безопасности при контроле температуры
Глава 8. Контроль давления и разрежения
1. Общие сведения и классификация приборов
Технические характеристики показывающих и сигнализирующих манометров
Технические характеристики тягомеров, напоромеров и тягонапоромеров
Технические характеристики промышленных вакуумметров
5. Техника безопасности при контроле давления
Глава 9. Контроль расхода, количества и уровня
1. Общие сведения и классификация приборов
Технические характеристики ротаметров
Технические характеристики шариковых расходомеров
Технические характеристики счетчиков жидкостей и газов
4. Счетчики и весы твердых и сыпучих материалов
5. Уровнемеры жидкостей и сыпучих материалов
Технические характеристики поплавковых уровнемеров с пружинным уравновешиванием
Технические характеристики буйковых уровнемеров
6. Техника безопасности при контроле расхода, количества и уровня
Глава 10. Контроль специальных параметров
2. Контроль влажности и запыленности газа
3. Контроь влажности сыпучих материалов
4. Контроль плотности жидкости
5. Техника безопасности при контроле специальных параметров
Раздел III. Автоматическое управление, контроль и регулирование
Глава 11. Системы автоматики с программным управлением
1. Общие принципы построения систем
2. Интуитивный метод разработки схем управления
3. Аналитический метод разработки схем управления
Глава 12. Автоматическая блокировка и защита в системах управления
1. Системы автоматической блокировки
2. Системы автоматической защиты
Глава 13. Системы автоматического контроля и сигнализации
2. Измерительные системы с цифровым отсчетом
3. Системы централизованного контроля
4. Системы автоматической сигнализации
Глава 14. Системы автоматического регулирования
1. Основные понятия и определения
2. Обыкновенные системы регулирования
3. Самонастраивающиеся системы регулирования
4. Качественные показатели автоматического регулирования
Глава 15. Объекты регулирования и их свойства
2. Параметры объектов регулирования
3. Определение основных свойств объектов
1. Классификация автоматических регуляторов
2. Регуляторы прерывистого (дискретного) действия
3. Регуляторы непрерівного действия
4. Выбор типа регуляторов и параметров его настройки
Формулы для определения параметров настройки регуляторов
Глава 17. Конструкции и характеристики регуляторов
1. Регуляторы прямого действия
2. Электрические регуляторы косвенного действия
3. Гидравлические регуляторы косвенного действия
4. Пневматические регуляторы косвенного действия
5. Техника безопасности при эксплуатации регуляторов
Раздел IV. Микропроцессорные системы
Глава 18. Общая характеристика микропроцессорных систем
1. Основные понятия и определения
2. Организация работы вычислительной машины
Глава 19. Математическое и программное обеспечение микроЭвм
2. Правила перевода одной системы счисления в другую
3. Формы представления чисел в эвм. Машинные коды
Глава 20. Внешние устройства микроЭвм
1. Классификация внешних устройств
2. Внешние запоминающие устройства
3. Устройства для связи эвм – оператор
4. Внешние устройства связи эвм с объектом
Глава 21. Применение микропроцессорных систем
1. Состав систем автоматики с применением микроЭвм
2. Управление производственными процессами
Раздел V. Промышленные роботы и роботизированные системы
Глава 22. Общие сведения о промышленных роботах
1. Основные определения и классификация промышленных роботов
2. Структура промышленных роботов
3. Основные технические показатели роботов
Глава 23. Конструкции промышленных роботов
1. Промышленные роботы агрегатно-модульного типа
Технические данные агрегатной гаммы промышленных роботов лм40ц.00.00 [9]
Технические характеристики и области обслуживания типового ряда промышленных роботов [9]
Технические данные модулей агрегатной гаммы рпм-25 [9]
2. Интерактивные промышленные роботы
3. Адаптивные промышленные роботы
5. Приводы промышленных роботов
Глава 24. Системы управления промышленными роботами
1. Назначение и классификация систем управления
2. Унифицированные системы управления
Технические данные унифицированных систем управления уцм [9]
Технические данные унифицированных систем управления упм [9]
Технические данные контурных систем управления укм [9]
Глава 25. Роботизация промышленного производства
1. Основные типы роботизированных систем
2. Гибкие производственные системы с применением промышленных роботов
3. Техника безопасности при эксплуатации роботов
Приложение Буквенные обозначения элементов электрических схем
По виду выходного сигнала измерительные системы подразделяют на аналоговые, в которых используются стрелочные приборы, и системы с цифровым отсчетом, получившие наибольшее распространение.
2. Измерительные системы с цифровым отсчетом
В настоящее время все более широкое распространение получает дискретное (цифровое) воспроизведение измеряемой величины, которая обычно является непрерывной (аналоговой) функцией времени.
В цифровых приборах измеряемая величина представляется в дискретной форме (числом), т. е. в виде окончательного результата измерения. Все бесконечное множество значений измеряемой величины в заданных пределах заменяется в цифровом приборе ограниченным рядом числовых значений, например, в четырехдекадном цифровом приборе – ограниченным рядом значений от 1 до 9999. Дискретная форма измеряемой величины обычно представляет собой определенное число электрических импульсов или их определенную комбинацию – код.
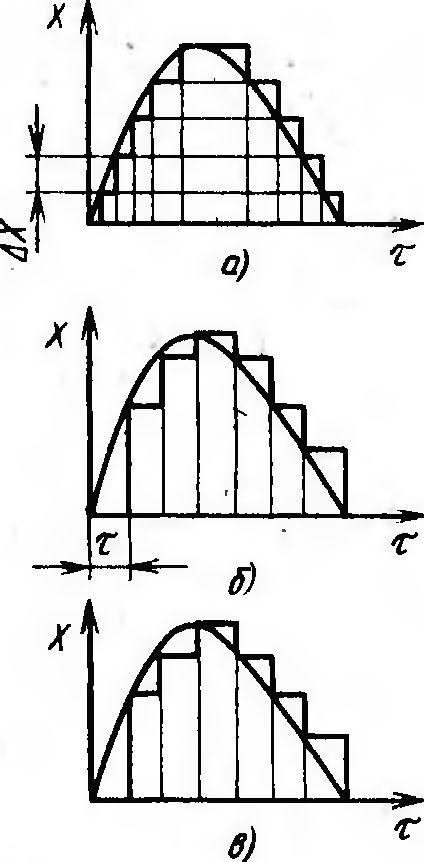
Рис. 114. Виды квантования сигналов:
а – по уровню; б – по времени; в – по уровню и по времени
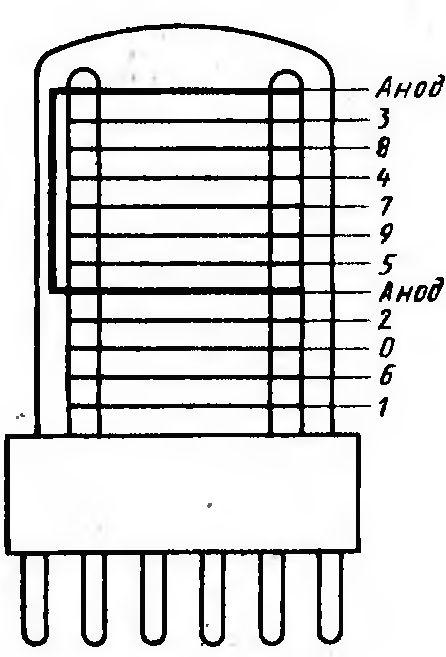
Рис. 115. Цифровая газоразрядная лампа
Дискретная форма представления величины по сравнению с аналоговой более удобна для визуального отсчета и регистрации, а также для передачи на расстояние. Применение приборов с цифровым отсчетом исключает субъективную погрешность отсчета.
При измерении числовое значение контролируемой величины определяется в процессе квантования. Квантованием называется процесс преобразования непрерывных (аналоговых) величии в дискретные. Различают три вида квантования: по уровню, по времени и смешанное по уровню и по времени.
Квантованием непрерывной величины по уровню (рис. 114, а) называют операцию, при которой непрерывная функция заменяется определенными дискретными значениями. Диапазон значений измеряемой величины X разбивается на одинаковые интервалы, называемые шагом квантования АХ, и вместо действительных значений измеряемой величины воспроизводятся ближайшие дискретные к ним значения.
Квантованием по времени (рис. 114, б) называется замена непрерывной величины ее значениями, взятыми в определенные дискретные моменты времени τтж, 2τк, ..., nτK, где величина τк называется периодом дискретности или интервалом квантования.
В цифровых измерительных приборах измеряемая величина преобразуется в число в результате комбинированного квантования (по уровню и по времени) – цифрового кодирования (рис. 114, в).
Для перехода от непрерывных значений измеряемого параметра в цифровой код автоматические измерительные приборы с цифровым выходом имеют аналого-цифровые преобразователи, осуществляющие преобразование непрерывных выходных сигналов первичных преобразователей в соответствующие им цифровые коды. Аналого-цифровой преобразователь является одним из основных узлов цифровой системы автоматического измерения.
Существующие аналого-цифровые преобразователи по конструктивному признаку делят на электромеханические и электронные, а по виду аналоговой величины – на преобразователи механических перемещений (линейных и угловых) и преобразователи электрических величин (токов, напряжений и т. д.).
Для воспроизведения показаний в цифровой форме применяют цифровые указатели (индикаторы) и регистраторы. Индикаторы выдают результаты измерений в цифровой форме для непосредственного восприятия оператором. Регистраторы воспроизводят результаты измерений также в цифровой форме и хранят их для дальнейшего непосредственного восприятия.
По принципу действия и конструктивному исполнению цифровые индикаторы выполняются в виде электромеханических устройств, цифровых ламп, электролюминесцентных знаковых элементов, устройств с подсветкой изображаемых цифр («световое табло»), электронно-лучевых трубок и др.
Цифровые индикаторы электромеханического типа представляют собой набор колес или непрерывных лент вращения, на которых нанесены изображения цифр. Эти индикаторы применяют главным образом в медленно действующих приборах, например в электрических счетчиках, массоизмерительных приборах различного рода и др.
В индикаторах на цифровых лампах для изображения цифр применяют газоразрядные лампы. Такая лампа (рис. 115) представляет собой стеклянную цилиндрическую колбу, заполненную неоном. Внутри колбы расположены десять катодов, которые выполнены из нихромовых проволочек, изогнутых в форме цифр от 0 до 9, и один сетчатый анод, охватывающий пакет катодов. При подаче напряжения на один из катодов между ним и анодом возникает тлеющий разряд, охватывающий всю поверхность катода, который начинает светиться, и очертания данной цифры становятся видимыми.
Электролюминесцентные знаковые индикаторы выполняют обычно из семи (иногда больше) изолированных полосок, образующих цифру 8. При подаче возбуждающего напряжения на соответствующие полоски возникает светящееся изображение любой десятичной цифры.
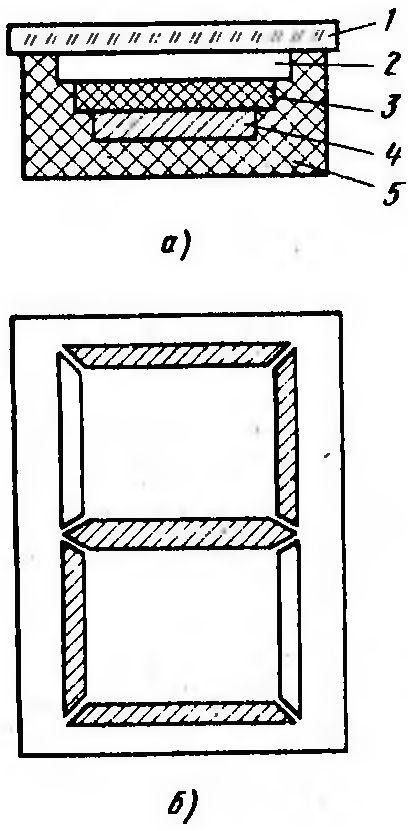
Рис. 116. Электролюминесцентный знаковый индикатор:
а – электролюминесцентный конденсатор; б – схема расположения элементов
Принцип действия индикатора состоит в использовании явления электролюминесценции, заключающегося в возникновении свечения люминофора (например, различных соединений фосфора) под воздействием электрического поля. Принципиально электролюминесцентный индикатор (рис. 116) является конденсатором с общим электродом 2, выполненным в виде прозрачной токопроводящей пленки из оксида кадмия, нанесенной на стекло 1. Второй электрод 4 конденсатора представляет собой изолированные друг от друга непрозрачные проводящие полоски из алюминия, отражающие свет, излучаемый люминофором 3. Электролюминофорный слой – смесь порошкообразного фосфора с диэлектриком – расположен между электродами 2 и 4 конденсатора. Конденсатор помещен в корпус 5 из диэлектриков. Для получения изображения нужной цифры напряжение подводят к определенным полоскам. Например, для получения цифры 2 необходимо включить пять полосок (на рис. 116, б, включенные полоски заштрихованы). Считывание происходит со стороны стекла, на котором темные полоски 4 отражают излучение люминофора, при этом очертание цифр возникает на темном фоне.
Регистрирующие устройства по их назначению можно разбить на две группы: цифропечатающие, выдающие результаты измерения для непосредственного восприятия их оператором; запоминающие, предназначенные для хранения и дальнейшей переработки информации. Их конструкция рассмотрена в гл. 20.
3. Системы централизованного контроля
Для уменьшения числа индивидуальных приборов применяют системы централизованного обегающего контроля. Основным техническим средством этих систем являются машины централизованного контроля, которые собирают, хранят и перерабатывают по определенному закону (алгоритму) информацию о ходе производственного процесса, поступающую от различных первичных преобразователей.
В этих системах показания всех приборов в форме электрических сигналов считываются в определенной последовательности обегающим устройством и перерабатываются в цифровую информацию, которая печатается в виде таблицы.
К машинам централизованного обегающего контроля можно присоединить первичные преобразователи, у которых выходной величиной является термоЭДС или изменение электрического сопротивления. Последовательное подключение к измерительному устройству машины централизованного обегающего контроля различных преобразователей требует от последних максимальной унификации выдаваемых сигналов по их виду и значению.
Рассмотрим принципы действия и типовую схему машины централизованного контроля (рис. 117). Основные функции, выполняемые машиной, следующие: опрос первичных преобразователей и сравнение полученных значений с заданной нормой; световая (звуковая) сигнализация и цифровая регистрация отклонений; измерение контролируемой величины и представление результатов измерения (в виде показания стрелочного прибора, цифрового указателя или записи) по запросу оператора; вычисление и анализ технико-экономических показателей, характеризующих объект контроля; цифровая регистрация измеренных и вычисленных значений параметров с заданной периодичностью, в том числе на перфокартах или магнитных лентах, для последующей обработки на вычислительной машине; цифровая регистрация значений параметров по запросу оператора.
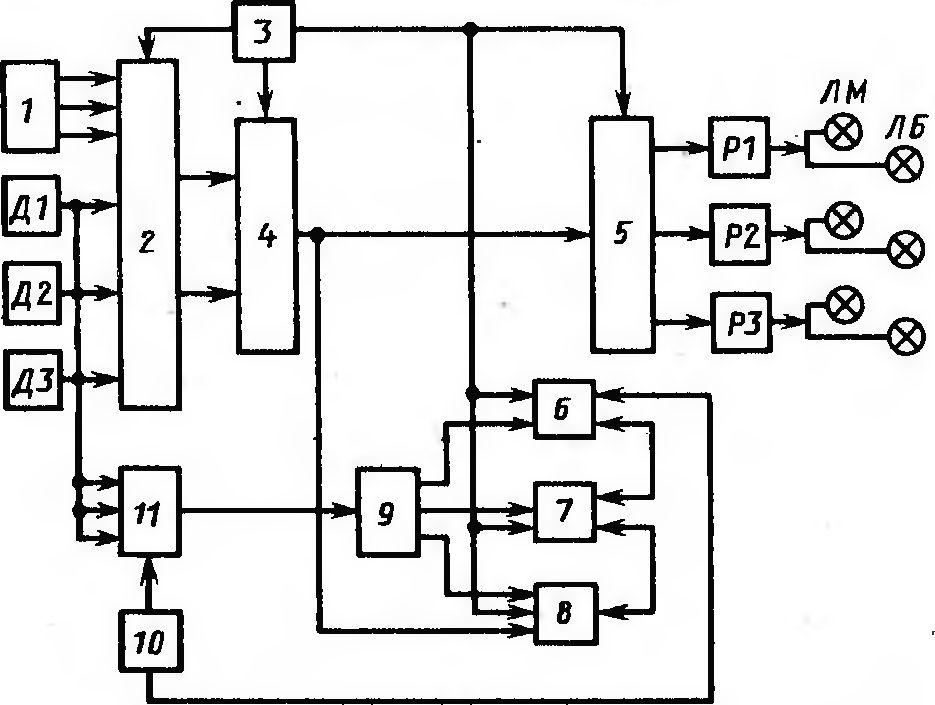
Рис. 117. Типовая схема устройства централизованного контроля
На вход машины от первичных преобразователей Д1...ДЗ поступают сигналы в аналоговой форме, чаще всего в виде напряжения или постоянного тока. Входной переключатель 2 по очереди подключает преобразователи к узлу обнаружения отклонения 4, фиксирующему отклонение контролируемого параметра от установленных задатчиком 1 пределов. При наличии отклонения с учетом знака последнего («меньше», «больше») через выходной переключатель 5, работающий синхронно с входным, сигнал поступает на выходные реле Р1 ... РЗ. Реле срабатывает и включает индикаторную лампу (ЛМ – «меньше», ЛБ – «больше»). Для цифрового представления значения контролируемого параметра преобразователи через входной переключатель 11 подключены к аналого-цифровому преобразователю 9, который выдает цифровой код, полученный в преобразователе; этот код используется в печатающем устройстве 8, регистрирующем значения контролируемых параметров, и в блоке логики 6, служащем для выявления причин нарушения работы объекта контроля, анализа причин аварий и т. д.

