ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 20.07.2024
Просмотров: 666
Скачиваний: 0

СОДЕРЖАНИЕ
А.Г. Староверов основы автоматизации производства
Глава 1. Общие сведения о системах автоматики и составляющих ее элементах
1. Основные понятия и определения
2. Классификация систем автоматического управления
3. Элементы автоматических систем
Глава 2. Первичные преобразователи
1. Общие сведения и классификация первичных преобразователей
2. Потенциометрические первичные преобразователи
3. Индуктивные первичные преобразователи
4. Емкостные первичные преобразователи
5. Тензометрические первичные преобразователи
6. Фотоэлектрические первичные преобразователи
Глава 3. Усилители и стабилизаторы
2. Электромеханические и магнитные усилители
Глава 4. Переключающие устройства и распределители
3. Контактные аппараты управления
4. Бесконтактные устройства управления
Наименование н обозначение логических функций н элементов
Глава 5. Задающие и исполнительные устройства
1. Классификация задающих и исполнительных устройств
3. Электрические исполнительные механизмы
Раздел II. Контрольно-измерительные приборы и техника измерения параметров технологических процессов
Глава 6. Общие сведения об измерении и контроле
1. Основные метрологические понятия техники измерения и контроля
3. Методы измерения и классификация. Контрольно-измерительных приборов
1. Температурные шкалы. Классификация технических приборов и устройств измерения температуры
Технические характеристики стеклинных ртутных, термометров типа тт
Технические характеристики дилатометрических гермометров
Характеристики манометрических термометров
4. Термоэлектрические термометры
Основные характеристики термоэлектрических термометров
Технические характеристики милливольтметров
5. Термометры сопротивления и термисторы
Технические характеристики термометров сопротивления
6. Бесконтактное измерение температуры
7. Техника безопасности при контроле температуры
Глава 8. Контроль давления и разрежения
1. Общие сведения и классификация приборов
Технические характеристики показывающих и сигнализирующих манометров
Технические характеристики тягомеров, напоромеров и тягонапоромеров
Технические характеристики промышленных вакуумметров
5. Техника безопасности при контроле давления
Глава 9. Контроль расхода, количества и уровня
1. Общие сведения и классификация приборов
Технические характеристики ротаметров
Технические характеристики шариковых расходомеров
Технические характеристики счетчиков жидкостей и газов
4. Счетчики и весы твердых и сыпучих материалов
5. Уровнемеры жидкостей и сыпучих материалов
Технические характеристики поплавковых уровнемеров с пружинным уравновешиванием
Технические характеристики буйковых уровнемеров
6. Техника безопасности при контроле расхода, количества и уровня
Глава 10. Контроль специальных параметров
2. Контроль влажности и запыленности газа
3. Контроь влажности сыпучих материалов
4. Контроль плотности жидкости
5. Техника безопасности при контроле специальных параметров
Раздел III. Автоматическое управление, контроль и регулирование
Глава 11. Системы автоматики с программным управлением
1. Общие принципы построения систем
2. Интуитивный метод разработки схем управления
3. Аналитический метод разработки схем управления
Глава 12. Автоматическая блокировка и защита в системах управления
1. Системы автоматической блокировки
2. Системы автоматической защиты
Глава 13. Системы автоматического контроля и сигнализации
2. Измерительные системы с цифровым отсчетом
3. Системы централизованного контроля
4. Системы автоматической сигнализации
Глава 14. Системы автоматического регулирования
1. Основные понятия и определения
2. Обыкновенные системы регулирования
3. Самонастраивающиеся системы регулирования
4. Качественные показатели автоматического регулирования
Глава 15. Объекты регулирования и их свойства
2. Параметры объектов регулирования
3. Определение основных свойств объектов
1. Классификация автоматических регуляторов
2. Регуляторы прерывистого (дискретного) действия
3. Регуляторы непрерівного действия
4. Выбор типа регуляторов и параметров его настройки
Формулы для определения параметров настройки регуляторов
Глава 17. Конструкции и характеристики регуляторов
1. Регуляторы прямого действия
2. Электрические регуляторы косвенного действия
3. Гидравлические регуляторы косвенного действия
4. Пневматические регуляторы косвенного действия
5. Техника безопасности при эксплуатации регуляторов
Раздел IV. Микропроцессорные системы
Глава 18. Общая характеристика микропроцессорных систем
1. Основные понятия и определения
2. Организация работы вычислительной машины
Глава 19. Математическое и программное обеспечение микроЭвм
2. Правила перевода одной системы счисления в другую
3. Формы представления чисел в эвм. Машинные коды
Глава 20. Внешние устройства микроЭвм
1. Классификация внешних устройств
2. Внешние запоминающие устройства
3. Устройства для связи эвм – оператор
4. Внешние устройства связи эвм с объектом
Глава 21. Применение микропроцессорных систем
1. Состав систем автоматики с применением микроЭвм
2. Управление производственными процессами
Раздел V. Промышленные роботы и роботизированные системы
Глава 22. Общие сведения о промышленных роботах
1. Основные определения и классификация промышленных роботов
2. Структура промышленных роботов
3. Основные технические показатели роботов
Глава 23. Конструкции промышленных роботов
1. Промышленные роботы агрегатно-модульного типа
Технические данные агрегатной гаммы промышленных роботов лм40ц.00.00 [9]
Технические характеристики и области обслуживания типового ряда промышленных роботов [9]
Технические данные модулей агрегатной гаммы рпм-25 [9]
2. Интерактивные промышленные роботы
3. Адаптивные промышленные роботы
5. Приводы промышленных роботов
Глава 24. Системы управления промышленными роботами
1. Назначение и классификация систем управления
2. Унифицированные системы управления
Технические данные унифицированных систем управления уцм [9]
Технические данные унифицированных систем управления упм [9]
Технические данные контурных систем управления укм [9]
Глава 25. Роботизация промышленного производства
1. Основные типы роботизированных систем
2. Гибкие производственные системы с применением промышленных роботов
3. Техника безопасности при эксплуатации роботов
Приложение Буквенные обозначения элементов электрических схем
Одновременно со спреерным устройством необходимо включить реле времени КТ2, отсчитывающее время охлаждения. Для этой цели воспользуемся примененным приемом и включим катушку реле времени КТ2 параллельно катушке КМ2. Таким образом получим вторую схему управления (рис. 104, б). Объединяя две схемы (рис. 104, а и б), получим общую схему управления (рис. 104, в).
Рассмотрим теперь работу схемы в целом (рис. 104, в). При нажатии на пусковую кнопку SB возбуждаются катушки контактора КМ1 и реле времени КТ1, начинается нагрев изделия. Через 12 с реле времени КТ1 сработает, и его контакты в цепи 1 разомкнутся, а в цепи 2 замкнутся. Начнется процесс охлаждения изделия. Одновременно с катушкой КМ2 электромагнитного крана возбудится реле времени КТ2, отсчитывающее время охлаждения. При размыкании контакта КТ2.1 (цепь 3) кран КМ2 и реле времени КТ2 выключаются, и схема возвращается в исходное положение.
Полученная схема управления индуктором и спреерным устройством разработана интуитивным методом. Однако нет никаких доказательств, что эта схема будет верна и оптимальна. Вопрос о работоспособности схемы можно будет решить только после ее изготовления и тщательной экспериментальной проверки. Именно это является самым большим недостатком интуитивного метода. Отмеченный недостаток отсутствует у аналитического метода.
3. Аналитический метод разработки схем управления
Аналитический метод появился в сороковые годы, однако он и до настоящего времени не оформился в широко применяемую теорию, что объясняется его сложностью. Аналитический метод базируется на элементах алгебры логики. Поэтому, прежде чем приступить к его изложению, остановимся на некоторых положениях алгебры логики.
Алгебра логики – раздел математической логики, который рассматривает применение математического аппарата к логике. Алгебра логики – алгебра высказываний, причем под высказыванием понимается любое суждение, предложение или понятие, но с одним условием – оно должно быть в данный момент либо истинным, либо ложным и не может быть одновременно и тем, и другим. Обычно истинному высказыванию приписывается значение единицы (1), а ложному – значение ноль (0).
Переменные в алгебре логики имеют свою специфику. Они обязательно имеют два состояния, одно исключающее другое. Например, «включено-выключено» или «замкнуто-разомкнуто».
Логические действия, с помощью которых простые суждения группируются в сложные, называются функциями алгебры логики.
Наибольшее применение получили функции, входящие в систему логических операций: умножения (конъюнкции), сложения (дизъюнкции) и отрицания (инверсии). С помощью указанных трех операций можно выразить все остальные операции алгебры логики.
Логические умножение и сложение выражаются соответственно точкой (·) и знаком плюс (+), а отрицание – чертой над символом переменной. Символы переменных изображаются буквами латинского алфавита.
Логическое умножение (конъюнкция) – это функция, соответствующая логической связке И, с помощью которой простые суждения объединяются в сложные. Это сложное суждение ложно (равно нулю), если хотя бы одно из простых суждений ложно. Сложное суждение f(X), определяемое логическим умножением двух простых суждений а и b, можно записать в виде
![]()
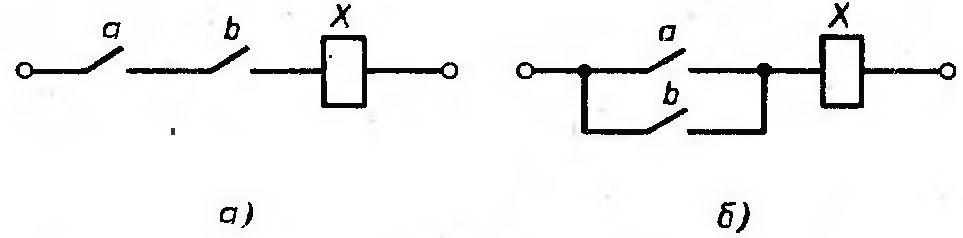
Рис. 105. Электрические цепи, реализующие операции:
а – умножения; б – сложения
При числе простых суждений, равном т, формула логического умножения примет вид
![]()
Электрическая цепь, реализующая логическую операцию И, состоит из последовательно включенных контактов. Ток протекает по этой цепи только в том случае, если замкнуты все контакты, а и b (рис. 105, а).
Логическое сложение (дизъюнкция) – это функция, соответствующая логической связке ИЛИ, с помощью которой простые суждения объединяются в сложные. Новое суждение будет истинно (равно 1), если хотя бы одно из простых суждений истинно. Сложное суждение f (X), определяемое логическим сложением двух простых суждений а и b, записывается в виде
![]()
При числе простых суждений, равном n, формула логического сложения примет вид
![]()
В электрической схеме функции ИЛИ соответствует параллельное соединение контактов. Ток протекает по этой цепи, если замкнут контакт а или контакт b (рис. 105, б).
Логическое отрицание (инверсия) – это функция, соответствующая логической связке НЕ. При этом, если основное суждение ложно (равно нулю), то его логическое отрицание истинно (равно единице), и наоборот. Аналитически логическое отрицание записывается следующим образом:
![]()
В электрической цепи функцию логического отрицания может выполнять реле с размыкающимися контактами, которые будут разомкнуты при подаче напряжения на обмотку реле.
В алгебре логики существует целый ряд законов (соотношений), которые отображают тождественные логические функции. Рассмотрим наиболее важные соотношения, которые можно разбить на три группы.
К первой группе относятся соотношения, которые согласуются с правилами обычной алгебры:
переместительные законы:
1)
![]() ; 2)
; 2)
![]()
сочетательные законы:
3)
![]()
4)
![]()
распределительный закон:
5)
![]()
Ко второй группе относятся соотношения, не согласующиеся с правилами обычной алгебры:
распределительный закон:
6)
![]()
закон повторения:
7)
![]()
8)
![]()
действия с константой:
9)
![]() 10)
10)
![]()
В третью группу входят соотношения, не имеющие эквивалентов в обычной алгебре:
закон отрицания (инверсии):
11)
![]() ; 12)
; 12)
![]()
действия с инверсными символами:
13)![]() 14)
14)
![]()
15)
![]() 16)
16)![]() 17)
17)
![]()
Рассмотренный математический аппарат алгебры логики может быть с успехом применен для решения различных задач при проектировании схем управления различными механизмами, так как каждая цепочка схемы может находиться только в двух состояниях: либо проводить электрический ток, либо нет.
Рассмотрим пример. Пусть дана математическая модель
![]()
По этой модели построим схему (рис. 106, а), которая будет иметь девять управляющих элементов. Теперь с помощью законов алгебры логики попытаемся сократить число элементов схемы (операция уменьшения числа элементов носит название минимизация).

Рис. 106. Схемы математической модели:
а – до минимизации; б – после минимизации
Сначала рассмотрим первые четыре - сомножителя модели и на основании соотношений 5, 7 и 13 запишем:
![]()
Затем, используя соотношения 5, 7, 9, 13, окончательно получим:
![]()
Схема по полученной после минимизации модели представлена на рис. 106, б. Она проще и надежнее, так как содержит всего три управляющих контакта.
Рассмотрим сущность аналитического метода разработки схем управления на примере разработки схемы управления нереверсивным электродвигателем с помощью кнопок управления. В схеме необходимо предусмотреть тепловую защиту электродвигателя. Эта задача решается следующим образом.
1. Проводится анализ работы установки для определения последовательности включения и выключения ее механизмов и выявления управляющих элементов. Вводятся условные обозначения исполнительных, промежуточных и управляющих элементов. На основе анализа составляется буквенная циклограмма работы установки, которая должна отражать строгую последовательность включения и выключения механизмов.
В рассматриваемом примере правильная схема должна обеспечивать выполнение следующих функций. При нажатии на пусковую кнопку катушка магнитного пускателя возбуждается током. При этом ротор электродвигателя начинает вращаться. Для остановки электродвигателя напряжение с катушки магнитного пускателя должно быть снято. Это может быть достигнуто нажатием на стоповую кнопку (размыканием ее контактов) или размыканием контактов теплового реле, которое срабатывает при длительной перегрузке электродвигателя. Обозначим катушку магнитного пускателя буквой К, пусковую кнопку – буквой Е, стоповую кнопку – буквой S и контакты теплового реле – буквой С. Тогда буквенная циклограмма будет иметь вид
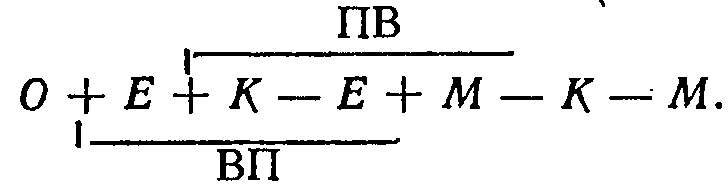
О + Е + К – Е + М – К – М,
где О – нулевой такт; М = S + С, ибо катушка К магнитного пускателя может быть обесточена стоповой кнопкой (ее контактами) или контактами теплового реле С.
2. На буквенной циклограмме определяются периоды включения (ПВ) и включающие периоды (ВП) исполнительных и промежуточных элементов. Периоду ПВ соответствует интервал от момента включения (пуска) элемента до момента его выключения (остановки), т. е. на буквенной циклограмме от знака плюс до знака минус элемента. Период ВП сдвинут относительно ПВ на один такт влево.
Определяем ПВ и ВП исполнительного элемента К на циклограмме. Других исполнительных и промежуточных элементов нет.