ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 20.07.2024
Просмотров: 663
Скачиваний: 0

СОДЕРЖАНИЕ
А.Г. Староверов основы автоматизации производства
Глава 1. Общие сведения о системах автоматики и составляющих ее элементах
1. Основные понятия и определения
2. Классификация систем автоматического управления
3. Элементы автоматических систем
Глава 2. Первичные преобразователи
1. Общие сведения и классификация первичных преобразователей
2. Потенциометрические первичные преобразователи
3. Индуктивные первичные преобразователи
4. Емкостные первичные преобразователи
5. Тензометрические первичные преобразователи
6. Фотоэлектрические первичные преобразователи
Глава 3. Усилители и стабилизаторы
2. Электромеханические и магнитные усилители
Глава 4. Переключающие устройства и распределители
3. Контактные аппараты управления
4. Бесконтактные устройства управления
Наименование н обозначение логических функций н элементов
Глава 5. Задающие и исполнительные устройства
1. Классификация задающих и исполнительных устройств
3. Электрические исполнительные механизмы
Раздел II. Контрольно-измерительные приборы и техника измерения параметров технологических процессов
Глава 6. Общие сведения об измерении и контроле
1. Основные метрологические понятия техники измерения и контроля
3. Методы измерения и классификация. Контрольно-измерительных приборов
1. Температурные шкалы. Классификация технических приборов и устройств измерения температуры
Технические характеристики стеклинных ртутных, термометров типа тт
Технические характеристики дилатометрических гермометров
Характеристики манометрических термометров
4. Термоэлектрические термометры
Основные характеристики термоэлектрических термометров
Технические характеристики милливольтметров
5. Термометры сопротивления и термисторы
Технические характеристики термометров сопротивления
6. Бесконтактное измерение температуры
7. Техника безопасности при контроле температуры
Глава 8. Контроль давления и разрежения
1. Общие сведения и классификация приборов
Технические характеристики показывающих и сигнализирующих манометров
Технические характеристики тягомеров, напоромеров и тягонапоромеров
Технические характеристики промышленных вакуумметров
5. Техника безопасности при контроле давления
Глава 9. Контроль расхода, количества и уровня
1. Общие сведения и классификация приборов
Технические характеристики ротаметров
Технические характеристики шариковых расходомеров
Технические характеристики счетчиков жидкостей и газов
4. Счетчики и весы твердых и сыпучих материалов
5. Уровнемеры жидкостей и сыпучих материалов
Технические характеристики поплавковых уровнемеров с пружинным уравновешиванием
Технические характеристики буйковых уровнемеров
6. Техника безопасности при контроле расхода, количества и уровня
Глава 10. Контроль специальных параметров
2. Контроль влажности и запыленности газа
3. Контроь влажности сыпучих материалов
4. Контроль плотности жидкости
5. Техника безопасности при контроле специальных параметров
Раздел III. Автоматическое управление, контроль и регулирование
Глава 11. Системы автоматики с программным управлением
1. Общие принципы построения систем
2. Интуитивный метод разработки схем управления
3. Аналитический метод разработки схем управления
Глава 12. Автоматическая блокировка и защита в системах управления
1. Системы автоматической блокировки
2. Системы автоматической защиты
Глава 13. Системы автоматического контроля и сигнализации
2. Измерительные системы с цифровым отсчетом
3. Системы централизованного контроля
4. Системы автоматической сигнализации
Глава 14. Системы автоматического регулирования
1. Основные понятия и определения
2. Обыкновенные системы регулирования
3. Самонастраивающиеся системы регулирования
4. Качественные показатели автоматического регулирования
Глава 15. Объекты регулирования и их свойства
2. Параметры объектов регулирования
3. Определение основных свойств объектов
1. Классификация автоматических регуляторов
2. Регуляторы прерывистого (дискретного) действия
3. Регуляторы непрерівного действия
4. Выбор типа регуляторов и параметров его настройки
Формулы для определения параметров настройки регуляторов
Глава 17. Конструкции и характеристики регуляторов
1. Регуляторы прямого действия
2. Электрические регуляторы косвенного действия
3. Гидравлические регуляторы косвенного действия
4. Пневматические регуляторы косвенного действия
5. Техника безопасности при эксплуатации регуляторов
Раздел IV. Микропроцессорные системы
Глава 18. Общая характеристика микропроцессорных систем
1. Основные понятия и определения
2. Организация работы вычислительной машины
Глава 19. Математическое и программное обеспечение микроЭвм
2. Правила перевода одной системы счисления в другую
3. Формы представления чисел в эвм. Машинные коды
Глава 20. Внешние устройства микроЭвм
1. Классификация внешних устройств
2. Внешние запоминающие устройства
3. Устройства для связи эвм – оператор
4. Внешние устройства связи эвм с объектом
Глава 21. Применение микропроцессорных систем
1. Состав систем автоматики с применением микроЭвм
2. Управление производственными процессами
Раздел V. Промышленные роботы и роботизированные системы
Глава 22. Общие сведения о промышленных роботах
1. Основные определения и классификация промышленных роботов
2. Структура промышленных роботов
3. Основные технические показатели роботов
Глава 23. Конструкции промышленных роботов
1. Промышленные роботы агрегатно-модульного типа
Технические данные агрегатной гаммы промышленных роботов лм40ц.00.00 [9]
Технические характеристики и области обслуживания типового ряда промышленных роботов [9]
Технические данные модулей агрегатной гаммы рпм-25 [9]
2. Интерактивные промышленные роботы
3. Адаптивные промышленные роботы
5. Приводы промышленных роботов
Глава 24. Системы управления промышленными роботами
1. Назначение и классификация систем управления
2. Унифицированные системы управления
Технические данные унифицированных систем управления уцм [9]
Технические данные унифицированных систем управления упм [9]
Технические данные контурных систем управления укм [9]
Глава 25. Роботизация промышленного производства
1. Основные типы роботизированных систем
2. Гибкие производственные системы с применением промышленных роботов
3. Техника безопасности при эксплуатации роботов
Приложение Буквенные обозначения элементов электрических схем
АУ может содержать два и более регистров (два регистра отводятся для хранения исходных чисел, а один – для формирования результата вычисления). Регистром называется узел ЭВМ, предназначенный для приема, хранения и передачи числа в другие узлы. Регистры могут быть одноразрядными и многоразрядными.
По своему значению регистры делятся на накопительные, регистры сдвига и преобразующие. Накопительные регистры используют для ввода, хранения и вывода чисел (информации). В регистрах сдвига может быть организован сдвиг числа влево или вправо на один или несколько разрядов. Преобразующие регистры выполняют помимо операций ввода, хранения, сдвига и вывода, некоторые логические операции.
Основным узлом АУ является сумматор, реализующий суммирование чисел, представленных сигналами на его входах. В зависимости от способа, положенного в основу построения сумматора, последние могут быть комбинационными и накапливающими.
В комбинационных сумматорах все входные сигналы подаются одновременно и на выходе сразу образуется их сумма. Запоминающая способность у таких сумматоров отсутствует. По этой причине сумматор обязательно работает с регистром для записи результата суммирования. В накапливающих сумматорах числа поступают по очереди и результат суммирования запоминается.
Суммирование многоразрядных чисел производится с использованием одноразрядных сумматоров. В зависимости от характера ввода-вывода чисел и организации переносов многоразрядные сумматоры делятся на последовательные и параллельные. В последовательном сумматоре сложение чисел осуществляется поразрядно, начиная с младшего разряда; в параллельном сумматоре – одновременно по всем разрядам, что существенно ускоряет операции сложения.
В АУ операция умножения реализуется последовательным выполнением микроопераций сложения и сдвига, а операция деления – последовательным выполнением микроопераций вычитания и сдвига.
Запоминающее устройство (ЗУ) предназначено для хранения исходных данных программы вычислений и промежуточных результатов.
ЗУ можно классифицировать по назначению, адресации кодов, принципам работы запоминающих элементов и т. д.
По назначению ЗУ делят на внутренние и внешние. Каждый из этих видов хранит определенный вид информации. Во внутренних ЗУ, как правило, хранятся программы работы машины, исходные данные и различные подпрограммы. Внутренние ЗУ составляют с процессором ЭВМ единое целое и находятся под его управлением. Во внешних ЗУ хранятся библиотеки специальных и стандартных программ, справочные данные, трансляторы, служебные и другие программы операционной системы. Их устройство подробно рассмотрено в гл. 20.
По адресации ЗУ могут быть с произвольным, последовательным и циклическим доступом. В ЗУ с произвольным доступом информация записывается или считывается непосредственно по любому адресу. В ЗУ с последовательным доступом для записи или считывания информации необходимо «пройти» мимо ячеек с другими адресами. В ЗУ с циклическим доступом обращение возможно только в последовательные определенные моменты времени. ЗУ с произвольным доступом являются наиболее быстродействующими, так как в них время обращения к ячейке не зависит от ее адреса, а определяется быстродействием коммутационных схем управления.
По принципу работы запоминающих элементов ЗУ подразделяются на магнитные, полупроводниковые и т. д.
В магнитных ЗУ в качестве элементов для хранения двоичной информации в оперативных ЗУ широко используются кольцевые (тороидальные) магнитные сердечники из ферритового материала с прямоугольной петлей гистерезиса. На их основе строятся матричные ЗУ, названные так потому, что расположение элементов памяти в матричных ЗУ образует двумерную прямоугольную таблицу (матрицу) входных и выходных проводов (шин).
Ферритовый сердечник (рис. 150) намагничивается, когда по обоим проводам обмотки 1 и 2 проходит определенной силы ток.
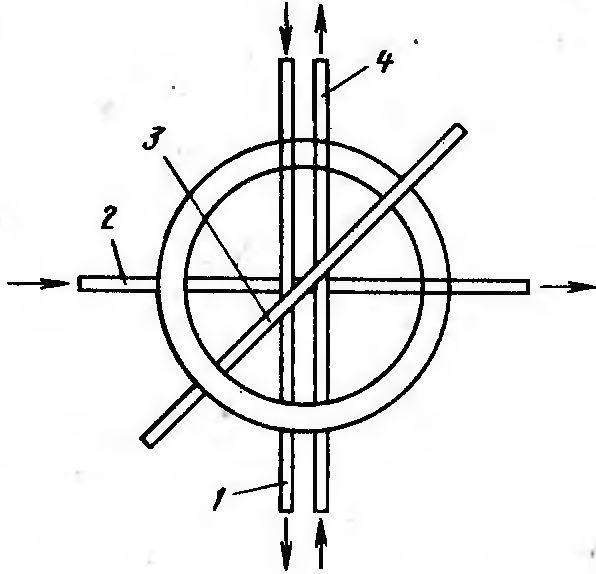
Рис. 150. Схема расположения обмоток на ферритовом сердечнике
Чтобы получить данные, помещенные ранее в запоминающее устройство, необходимо создать соответствующую поляризацию в ферритовом сердечнике, пропуская импульс тока по проводам обмотки. При изменении полярности в обмотке считывания 3 индуцируется импульс тока. Сигнал, проходящий по считывающей обмотке, может быть обнаружен, если кольцо содержало единицу, а не нуль. Однако при считывании информации из кольца единица превращается в нуль. Для исключения такого превращения ЭВМ выполняют специальную операцию, т. е. они восстанавливают единицы в тех сердечниках, где они были раньше. Эта операция выполняется путем, новой записи – подачей импульса по проводу 4. Импульс, пропущенный через этот провод, может стирать информацию, записанную на кольце.
Рассмотрим работу матрицы ЗУ (рис. 151), содержащей четыре горизонтальных ряда сердечников, каждый из которых предназначен для записи и хранения шестиразрядных чисел. Считывающий провод (на схеме он показан более жирной линией) пронизывает последовательно все сердечники, поэтому считывание информации будет представлять собой последовательный опрос всех сердечников поочередно.
Рассмотрим пример записи и считывания числа 110011 в верхнем ряду сердечников. Для этого на клемму Y1 и клеммы Х1, Х2, Х5 и Х6 подведем импульсы тока такого направления и силы, которые перемагнитят сердечники 1, 2, 5 и 6 из нулевого в единичное состояние, а сердечники 3 и 4 останутся в нулевом состоянии. Сила токов импульсов, подаваемых на клеммы Y1, X1, Х2, Х5 и Х6, должна быть равна половине силы тока, необходимой для перемагничивания одного сердечника. В тех сердечниках, где направления тока по горизонтальным и вертикальным проводам совпадают, силы тока суммируются и сердечники перемагничиваются. Если такое совпадение отсутствует, то сердечники остаются в том состоянии, в котором они находились.
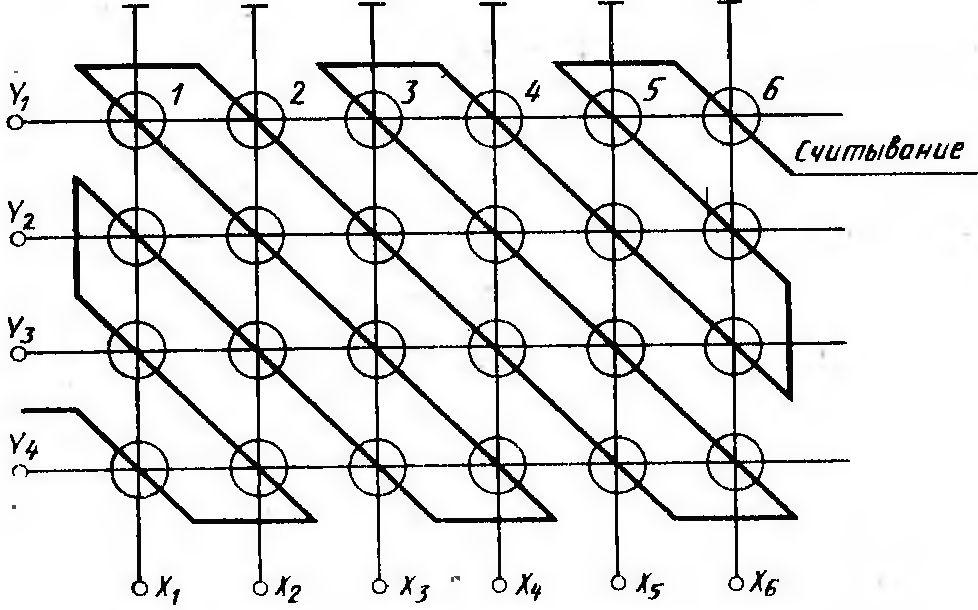
Рис. 151. Схема матрицы запоминающего устройства
Импульсы, сила тока которых равна половине силы тока, необходимой для перемагничивания сердечников, называют полутонами.
Для считывания информации импульсы полутона обратного направления поочередно подаются на клеммы Yl и Х1, Y1 и Х2, Yl и Х4, и Х5, Y1 и Х6. В результате на клемме считывания образуется последовательность импульсов и пауз, представляющих собой считываемое число.
ЗУ состоит из набора матриц. Этот набор называют матричным кубом или кубом памяти.
Схема ЗУ на полупроводниковых устройствах построена по следующему принципу. В тех разрядах, где должна быть записана единица, устанавливаются диоды, а в разрядах, предназначенных для записи нуля, диоды отсутствуют.
Устройства ввода-вывода относят к периферийным устройствам, которые подробно описаны в гл. 20. Поэтому рассмотрим вопросы с организацией передачи информации между оперативной памятью ЭВМ и периферийным устройством. В современных ЭВМ такая связь осуществляется по схеме: оперативная память – процессор – канал – интерфейс (универсальный вход в канал, связанный с управляющим устройством) – узел управления внешним устройством – внешнее устройство. Информация может направляться от оперативной памяти к внешнему устройству и обратно. Процессор организует обмен информацией между оперативным запоминающим устройством и внешним устройством путем выдачи в, канал определенной команды.
Канал – это устройство, предназначенное для выполнения операций ввода и вывода информации и обеспечивающий все связи между оперативной памятью, процессором и различными периферийными внешними устройствами.
При большом количестве периферийных устройств для их обслуживания используется несколько каналов.
В современных ЭВМ используются селекторные и мультиплексные каналы. Селекторный канал имеет только один подканал. Он не может одновременно обслуживать несколько периферийных устройств и поэтому участвует только в одной операции по передаче данных. Посредством селекторных каналов поддерживается связь между ЗУ и быстродействующим внешним ЗУ на магнитных лентах и дисках. Мультиплексный канал имеет несколько подканалов. Их число определяется емкостью оперативной памяти канала.
В мини- и микроЭВМ нашли применение программно-управляемые каналы ввода-вывода и каналы прямого доступа к ЗУ. При программно-управляемом канале ввода-вывода все элементарные операции, предназначенные для ввода и вывода информации, выполняет процессор, поэтому для реализации такого канала требуется минимальное число устройств. Этот канал используется, если не требуется высокая скорость передачи информации.
Периферийные устройства подключаются к соответствующим каналам посредством устройства, называемого интерфейсом. Интерфейс – это универсальный вход в канал. Он непосредственно связан с управляющим устройством. В соответствии с функциями интерфейс представляет собой переключатель. С помощью интерфейса к каналу может быть подсоединено любое периферийное устройство независимо от его назначения.
В микроЭВМ стандартный интерфейс ввода-вывода выполняется в виде печатной платы, к разъемам которой подключаются устройства ввода-вывода.
Устройство управления (УУ) состоит из центрального и ряда вспомогательных устройств, а также устройства сигнализации и устройства ручного управления.
Под центральным устройством управления ЭВМ понимают совокупность блоков и узлов процессора, обеспечивающих координирование работы всех устройств ЭВМ и управления ими для всех принятых режимов. Центральное устройство управления, реализуя различные рабочие и другие программы, организует все необходимые действия по приему, оценке и преобразованию исходной информации, по получению результирующих данных и выдаче их пользователю.
Устройства сигнализации и ручного управления непрерывно контролируют работу ЭВМ и различные изменения хода оперативного управления.
УУ связано со всеми блоками и отображает особенности структуры ЭВМ.
Выполнение различных операций в ЭВМ осуществляется за определенные интервалы времени. В связи с этим возможны два принципа организации работы УУ: синхронный и асинхронный.
В синхронных УУ время выполнения любой операции устанавливается по самой длительной операции. Поэтому при выполнении коротких операций часть времени ЭВМ простаивает, что уменьшает ее быстродействие.
В асинхронных УУ длительность рабочего такта является переменной величиной, зависящей от кода выполняемой операции. Быстродействие ЭВМ с асинхронным УУ значительно выше, чем с синхронным. Однако схема таких УУ значительно сложней.
Контрольные вопросы и задания
1. Что называется электронно-вычислительной машиной?
2. Укажите основные этапы развития ЭВМ и перечислите особенности ЭВМ каждого поколения.
3. Что общего и в чем различие между ЭВМ и микроЭВМ?
4. Охарактеризуйте машинные единицы информации.
5. Что такое алгоритм управления?
6. Каково назначение процессора?
7. Как осуществляется процесс вычисления в ЭВМ?
8. Назовите основные характеристики ЭВМ.
9. Опишите технологию изготовления процессоров.
10. Как изготовляют интегральные микросхемы?
11. Какие устройства входят в состав ЭВМ?
12. Каково назначение каждого устройства?
13. Каково назначение и принцип действия арифметического устройства?
14. Каковы назначения регистров и сумматоров?
15. Дайте классификацию запоминающих устройств ЭВМ и назовите их назначение.
16. Каково назначение устройств ввода-вывода?
17. Каково назначение интерфейса?
18. Как работает устройство управления ЭВМ?

