ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 20.07.2024
Просмотров: 578
Скачиваний: 0

СОДЕРЖАНИЕ
А.Г. Староверов основы автоматизации производства
Глава 1. Общие сведения о системах автоматики и составляющих ее элементах
1. Основные понятия и определения
2. Классификация систем автоматического управления
3. Элементы автоматических систем
Глава 2. Первичные преобразователи
1. Общие сведения и классификация первичных преобразователей
2. Потенциометрические первичные преобразователи
3. Индуктивные первичные преобразователи
4. Емкостные первичные преобразователи
5. Тензометрические первичные преобразователи
6. Фотоэлектрические первичные преобразователи
Глава 3. Усилители и стабилизаторы
2. Электромеханические и магнитные усилители
Глава 4. Переключающие устройства и распределители
3. Контактные аппараты управления
4. Бесконтактные устройства управления
Наименование н обозначение логических функций н элементов
Глава 5. Задающие и исполнительные устройства
1. Классификация задающих и исполнительных устройств
3. Электрические исполнительные механизмы
Раздел II. Контрольно-измерительные приборы и техника измерения параметров технологических процессов
Глава 6. Общие сведения об измерении и контроле
1. Основные метрологические понятия техники измерения и контроля
3. Методы измерения и классификация. Контрольно-измерительных приборов
1. Температурные шкалы. Классификация технических приборов и устройств измерения температуры
Технические характеристики стеклинных ртутных, термометров типа тт
Технические характеристики дилатометрических гермометров
Характеристики манометрических термометров
4. Термоэлектрические термометры
Основные характеристики термоэлектрических термометров
Технические характеристики милливольтметров
5. Термометры сопротивления и термисторы
Технические характеристики термометров сопротивления
6. Бесконтактное измерение температуры
7. Техника безопасности при контроле температуры
Глава 8. Контроль давления и разрежения
1. Общие сведения и классификация приборов
Технические характеристики показывающих и сигнализирующих манометров
Технические характеристики тягомеров, напоромеров и тягонапоромеров
Технические характеристики промышленных вакуумметров
5. Техника безопасности при контроле давления
Глава 9. Контроль расхода, количества и уровня
1. Общие сведения и классификация приборов
Технические характеристики ротаметров
Технические характеристики шариковых расходомеров
Технические характеристики счетчиков жидкостей и газов
4. Счетчики и весы твердых и сыпучих материалов
5. Уровнемеры жидкостей и сыпучих материалов
Технические характеристики поплавковых уровнемеров с пружинным уравновешиванием
Технические характеристики буйковых уровнемеров
6. Техника безопасности при контроле расхода, количества и уровня
Глава 10. Контроль специальных параметров
2. Контроль влажности и запыленности газа
3. Контроь влажности сыпучих материалов
4. Контроль плотности жидкости
5. Техника безопасности при контроле специальных параметров
Раздел III. Автоматическое управление, контроль и регулирование
Глава 11. Системы автоматики с программным управлением
1. Общие принципы построения систем
2. Интуитивный метод разработки схем управления
3. Аналитический метод разработки схем управления
Глава 12. Автоматическая блокировка и защита в системах управления
1. Системы автоматической блокировки
2. Системы автоматической защиты
Глава 13. Системы автоматического контроля и сигнализации
2. Измерительные системы с цифровым отсчетом
3. Системы централизованного контроля
4. Системы автоматической сигнализации
Глава 14. Системы автоматического регулирования
1. Основные понятия и определения
2. Обыкновенные системы регулирования
3. Самонастраивающиеся системы регулирования
4. Качественные показатели автоматического регулирования
Глава 15. Объекты регулирования и их свойства
2. Параметры объектов регулирования
3. Определение основных свойств объектов
1. Классификация автоматических регуляторов
2. Регуляторы прерывистого (дискретного) действия
3. Регуляторы непрерівного действия
4. Выбор типа регуляторов и параметров его настройки
Формулы для определения параметров настройки регуляторов
Глава 17. Конструкции и характеристики регуляторов
1. Регуляторы прямого действия
2. Электрические регуляторы косвенного действия
3. Гидравлические регуляторы косвенного действия
4. Пневматические регуляторы косвенного действия
5. Техника безопасности при эксплуатации регуляторов
Раздел IV. Микропроцессорные системы
Глава 18. Общая характеристика микропроцессорных систем
1. Основные понятия и определения
2. Организация работы вычислительной машины
Глава 19. Математическое и программное обеспечение микроЭвм
2. Правила перевода одной системы счисления в другую
3. Формы представления чисел в эвм. Машинные коды
Глава 20. Внешние устройства микроЭвм
1. Классификация внешних устройств
2. Внешние запоминающие устройства
3. Устройства для связи эвм – оператор
4. Внешние устройства связи эвм с объектом
Глава 21. Применение микропроцессорных систем
1. Состав систем автоматики с применением микроЭвм
2. Управление производственными процессами
Раздел V. Промышленные роботы и роботизированные системы
Глава 22. Общие сведения о промышленных роботах
1. Основные определения и классификация промышленных роботов
2. Структура промышленных роботов
3. Основные технические показатели роботов
Глава 23. Конструкции промышленных роботов
1. Промышленные роботы агрегатно-модульного типа
Технические данные агрегатной гаммы промышленных роботов лм40ц.00.00 [9]
Технические характеристики и области обслуживания типового ряда промышленных роботов [9]
Технические данные модулей агрегатной гаммы рпм-25 [9]
2. Интерактивные промышленные роботы
3. Адаптивные промышленные роботы
5. Приводы промышленных роботов
Глава 24. Системы управления промышленными роботами
1. Назначение и классификация систем управления
2. Унифицированные системы управления
Технические данные унифицированных систем управления уцм [9]
Технические данные унифицированных систем управления упм [9]
Технические данные контурных систем управления укм [9]
Глава 25. Роботизация промышленного производства
1. Основные типы роботизированных систем
2. Гибкие производственные системы с применением промышленных роботов
3. Техника безопасности при эксплуатации роботов
Приложение Буквенные обозначения элементов электрических схем
Глава 17. Конструкции и характеристики регуляторов
1. Регуляторы прямого действия
Регулятором прямого действия называют регулятор, перемещение регулирующего органа которого производится воздействием чувствительного элемента, использующего для этого энергию регулируемой среды.
Примером регулятора прямого действия является показанный на рис. 121 астатический регулятор уровня. В этом регуляторе чувствительным элементом является поплавок, а регулирующим органом – заслонка.
Отсутствие дистанционного управления у регуляторов прямого действия ограничивает их область применения. Однако благодаря небольшой стоимости и простоте конструкции регуляторы прямого действия находят применение в тех случаях, когда требуется стабилизирующее регулирование с невысокой точностью при постоянной нагрузке.
Промышленность выпускает серийно регуляторы прямого действия для стабилизации температуры, давлений и уровня.
Регуляторы температуры типов РТД, РТ и РТК предназначаются для автоматического поддержания заданной температуры жидких и газообразных сред.
Рассмотрим работу регулятора прямого действия типа РТД (рис. 133). Термометрическая система регулятора представляет собой паровой манометрический термометр, состоящий из термобаллона 1, капилляра 2 и сильфона 3. Внутренняя емкость системы частично заполнена низкокипящей жидкостью, температура кипения которой ниже нижнего предела регулирования температуры. Термобаллон размещается в контролируемой среде, и в соответствии с ее температурой в термометрической системе устанавливается давление паров рабочей жидкости. В результате этого в сильфоне развивается усилие, пропорциональное гое эффективной площади, которое уравновешивается усилием пружины 4. При отклонениях температуры от заданного значения, определяемого состоянием пружины, давление в термосистеме изменяется и, следовательно, растягивается или сжимается сильфон, вызывая перемещение штока 5 и золотника 6 регулирующего клапана. Благодаря этому изменяются проходное сечение клапана и количество нагреваемого вещества. Изменение расхода нагреваемого вещества прекращается, как только его температура достигнет заданного значения.
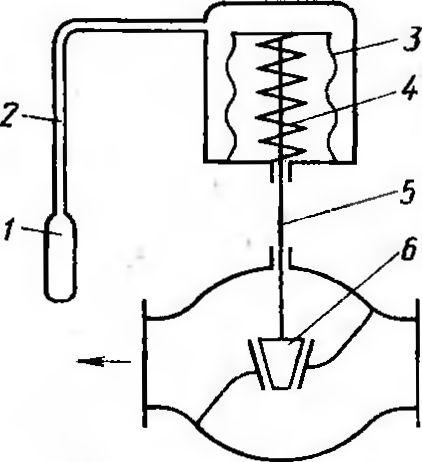
Рис. 133. Регулятор температуры прямого действия
Регуляторы давления выпускаются двух типов: пружинные и гиревые. К первым относятся регуляторы перепада давления. Такие регуляторы выпускаются двух модификаций: «после себя» (давление закрывает) и «до себя» (давление открывает).
Регулятор давления прямого действия РДП (рис. 134) предназначен для поддержания давления мазута в трубопроводе. Плоская гофрированная мембрана 2 жестко связана с золотником 4 клапана. Настройка регулятора на необходимое давление осуществляется винтом, соединенным с мембраной посредством тарированной пружины 3. При увеличении давления в системе 1 мембрана 2 прогибается вниз и прикрывает доступ мазута с помощью золотника 4. Регуляторы РДП выпускают в четырех модификациях с давлениями настройки от 0,1 · 106 Па до 4 · 106 Па. Регулятор встраивается непосредственно в трубопровод и настраивается по показанию манометра.
Из регуляторов давления прямого действия, предназначенных для автоматического поддержания заданного давления пара, воды, таза и других сред, следует отметить регулятор типа РД-32. Диапазон настройки регулятора 0,25 · 106 ... 2,5 · 106 Па, диаметр условного прохода 32 мм, зона нечувствительности – не более 2,5 %.
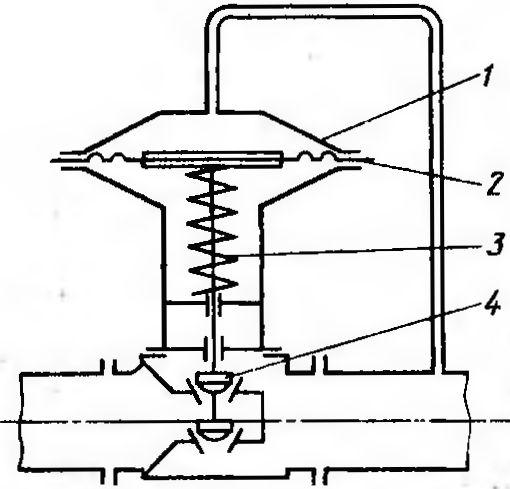
Рис. 134. Регулятор давления прямого действия
Универсальный регулятор давления типа РДУК-2 предназначен для регулирования высокого (1,2- 10е МПа) и среднего (0,6 МПа) давления неагрессивного газа и поддержания заданного значения выходного давления от нуля до максимума при переменном входном давлении и изменении расхода.
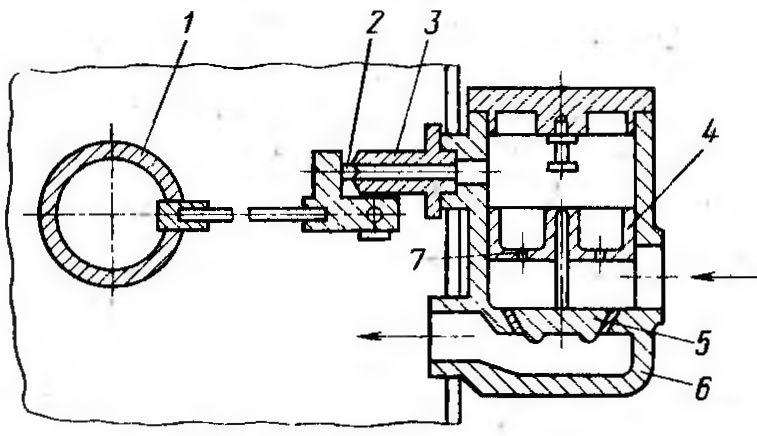
Рис. 135. Регулятор уровня прямого действия
Регуляторы уровня поплавкового типа являются наиболее распространенными. Регулятор уровня РУ-16 (рис. 135) имеет поплавок 1, который кинематически связан с золотниковым устройством 5 клапана 6. Поступающая в клапан жидкость своим напором поднимает поршень 4 и связанное с ним золотниковое устройство 5 и течет в резервуар через щель между золотником и корпусом клапана. В это же время часть жидкости протекает через небольшое отверстие 7 поршня и головки 3 в резервуар. При достижении заданного уровня в резервуаре жидкость поднимает поплавок, который перекрывает пробкой 2 отверстие в головке 3.
Давление жидкости под поршнем уравнивается, а поршень действием собственного веса опускается вместе с золотником, перекрывающим отверстие, в клапан, после чего подача жидкости в резервуар прекращается. При снижении жидкости в резервуаре поплавок опускается и приоткрывает пробкой отверстие в головке 3, давая тем самым поступающей жидкости вновь поднять поршень и заполнить резервуар до заданного уровня.
Регулятор РУ-16 предназначается для регулирования уровня чистых агрессивных жидкостей с температурой 5 ... 60 °С.
2. Электрические регуляторы косвенного действия
В электрических и электронных регуляторах для управления исполнительным механизмом используется электрическая энергия.
Для создания позиционных систем автоматического регулирования в литейных и термических цехах используют серийные приборы различных модификаций, снабженных электрическими контактными устройствами. Для позиционного регулирования могут быть использованы преобразователи релейного типа (биметаллические, дилатометрические и др.).
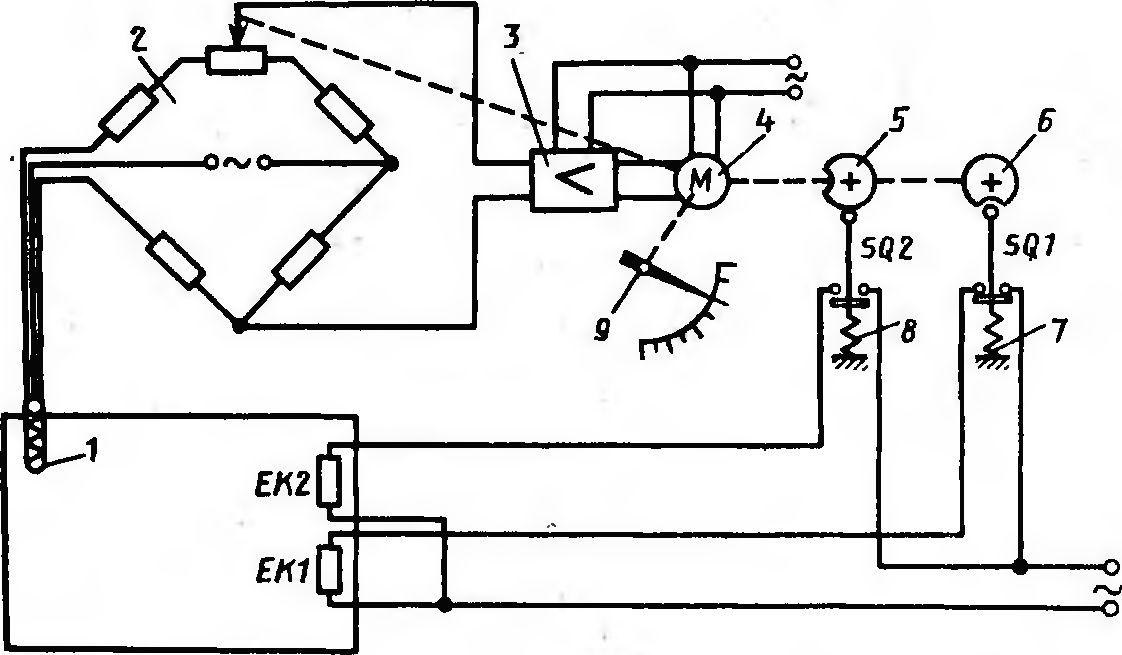
Рис. 136. Схема двухпозициоииого электрического регулятора температуры
В схеме двухпозиционного регулирования температуры в сушильной печи (рис. 136) система обогрева сушильной печи устроена так, что если температура в рабочем пространстве станет ниже допустимой, то должны включаться нагревательные элементы ЕК1 большой мощности, а если температура станет выше допустимой, то включаются элементы ЕК2 малой мощности. В качестве чувствительного элемента используется «термометр сопротивления 1, подключенный к электронному мосту 2 по трехпроводной схеме. Если температура в печи отклонится от заданного значения, то изменится электрическое сопротивление термометра и в диагонали моста появится сигнал разбаланса. Усиленный электронным усилителем 3 сигнал приводит во вращение ротор реверсивного двигателя 4. Направление его вращения зависит от знака разбаланса, т. е. от знака отклонения температуры от заданного значения. С ротором электродвигателя кинематически связаны два диска: 5 и б, положение которых зависит от угла поворота ротора, следовательно, от положения движка реохорда и показывающей стрелки 9 моста. К дискам с помощью пружин 7 и 8 прижаты направляющие контактов SQ1 и SQ2. При вращении дисков контакт SQ2 замкнут в интервале показаний прибора от начала шкалы до впадины диска 5 и разомкнут в интервале от впадины до максимума шкалы. Контакт SQ1, наоборот, разомкнут от начала шкалы до впадины диска 6 и замкнут в интервале от впадины до максимума шкалы.
При достижении нижнего температурного предела замыкается контакт SQ1 и включаются нагревательные элементы ЕК1 большой мощности. При достижении верхнего температурного предела замыкается контакт SQ2, а контакт SQ1 размыкается, что приводит к медленному снижению температуры. Как только будет достигнут нижний предел температуры, ситуация повторится, и т. д.
На рис. 137 показана электрическая схема двухпозиционного регулирования температуры в рабочем пространстве камерной печи типа СНЗ-4,0.8,0.2,6/10 с защитной атмосферой. Печь трехфазная и подсоединяется к печи через предохранители FU. Включение и выключение нагревательных элементов осуществляется с помощью контактора. Стабилизация температуры обеспечивается системой автоматического регулирования (САР).
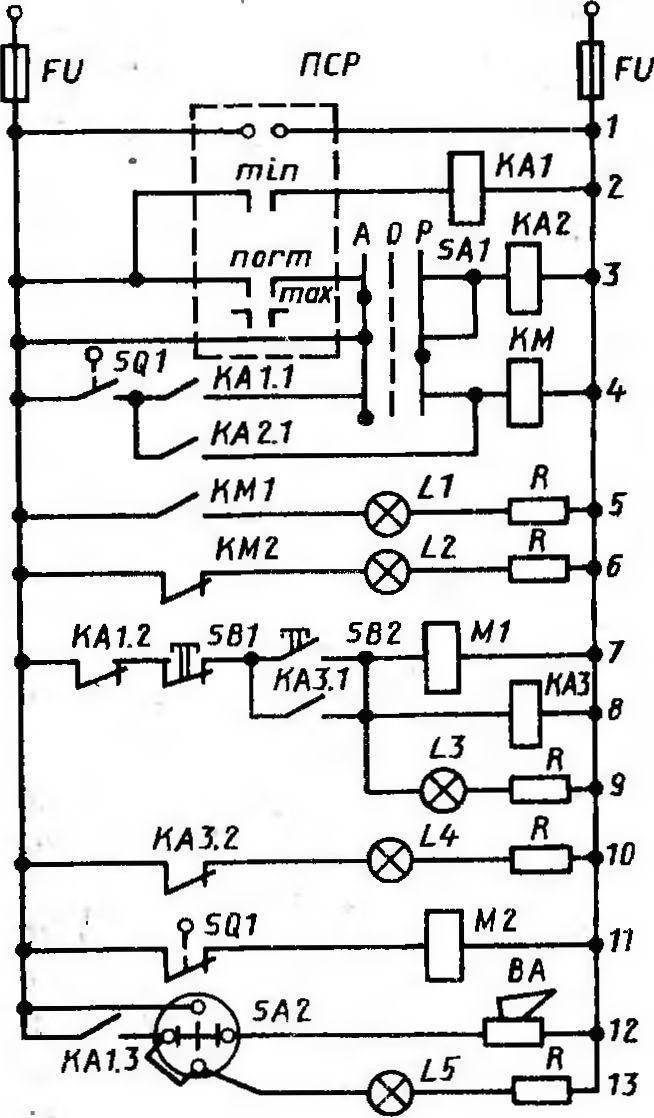
Рис. 137. Электрическая схема регулирования температуры рабочего пространства камерной электрической печи с защитной атмосферой
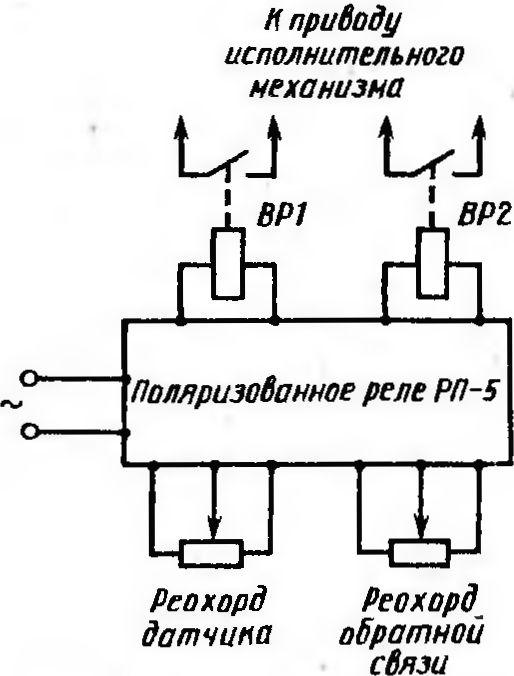
Рис. 138. Упрощенная структурная схема балансного реле типа БР-3
Схема управления состоит из 13 цепей. По функциональному признаку их можно разделить на цепи управления, цепи защиты и информационные цепи. Управление осуществляется: температурой в рабочем пространстве печи (автоматическое и ручное в случае выхода САР из строя); подачей защитной атмосферы в печь; подачей газовой завесы. Информационные цепи служат для оповещения обслуживающего персонала о различных режимах работы печи с помощью световых и звуковых сигналов.
В печи имеется одна зона. Регулирование температуры осуществляется с помощью САР, состоящей из термопары, компенсационных проводов, потенциометра ПСР (потенциометр самопишущий, регулирующий), промежуточных реле KA1 и КА2, контактора КМ и, наконец, самой печи СНЗ-4,0.8,2.6/10. Потенциометр ПСР связан со схемой управления с помощью цепей 1, 2 к 3. Цепь 1 служит для питания самого прибора ПСР. Цепи 2 и 3 содержат минимальный (min) и нормальный (norm) контакты терморегулятора ПСР. Максимальный контакт (max) ПСР в схеме не использован. В цепях 2 и 3 формируется управляющий сигнал, который с помощью промежуточных реле КА1 и КА2 усиливается до значения, необходимого для приведения в действие катушки исполнительного элемента (контактор КМ). Таким образом, КА1 и КА2 играют роль усилителей сигнала по мощности.
В цепях 3 и 4 имеются контакты универсального переключателя, рассчитанного на три положения: автоматическое (А), выключено (0) и ручное (Р). Каждое из этих положений соответствует определенному режиму работы печи: автоматическое управление температурой в печи; печь выключена; ручное управление температурой (только при наладке режимов или в случае выхода САР из строя). С помощью цепи 4 включается контактор и, следовательно, сами нагревательные элементы печи. Контактор может включиться только в том случае, если дверца печи будет закрыта. Последнее обеспечивается введением в цепь 4 путевого выключателя SQ1, выключающегося при открытии дверцы печи. Непосредственное включение катушки контактора, а следовательно, и его контактов осуществляется следующим образом: при автоматическом управлении – контактами промежуточных реле КА1 и КА2; при ручном управлении – только с помощью контактов КА2.1.

