ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 20.07.2024
Просмотров: 584
Скачиваний: 0

СОДЕРЖАНИЕ
А.Г. Староверов основы автоматизации производства
Глава 1. Общие сведения о системах автоматики и составляющих ее элементах
1. Основные понятия и определения
2. Классификация систем автоматического управления
3. Элементы автоматических систем
Глава 2. Первичные преобразователи
1. Общие сведения и классификация первичных преобразователей
2. Потенциометрические первичные преобразователи
3. Индуктивные первичные преобразователи
4. Емкостные первичные преобразователи
5. Тензометрические первичные преобразователи
6. Фотоэлектрические первичные преобразователи
Глава 3. Усилители и стабилизаторы
2. Электромеханические и магнитные усилители
Глава 4. Переключающие устройства и распределители
3. Контактные аппараты управления
4. Бесконтактные устройства управления
Наименование н обозначение логических функций н элементов
Глава 5. Задающие и исполнительные устройства
1. Классификация задающих и исполнительных устройств
3. Электрические исполнительные механизмы
Раздел II. Контрольно-измерительные приборы и техника измерения параметров технологических процессов
Глава 6. Общие сведения об измерении и контроле
1. Основные метрологические понятия техники измерения и контроля
3. Методы измерения и классификация. Контрольно-измерительных приборов
1. Температурные шкалы. Классификация технических приборов и устройств измерения температуры
Технические характеристики стеклинных ртутных, термометров типа тт
Технические характеристики дилатометрических гермометров
Характеристики манометрических термометров
4. Термоэлектрические термометры
Основные характеристики термоэлектрических термометров
Технические характеристики милливольтметров
5. Термометры сопротивления и термисторы
Технические характеристики термометров сопротивления
6. Бесконтактное измерение температуры
7. Техника безопасности при контроле температуры
Глава 8. Контроль давления и разрежения
1. Общие сведения и классификация приборов
Технические характеристики показывающих и сигнализирующих манометров
Технические характеристики тягомеров, напоромеров и тягонапоромеров
Технические характеристики промышленных вакуумметров
5. Техника безопасности при контроле давления
Глава 9. Контроль расхода, количества и уровня
1. Общие сведения и классификация приборов
Технические характеристики ротаметров
Технические характеристики шариковых расходомеров
Технические характеристики счетчиков жидкостей и газов
4. Счетчики и весы твердых и сыпучих материалов
5. Уровнемеры жидкостей и сыпучих материалов
Технические характеристики поплавковых уровнемеров с пружинным уравновешиванием
Технические характеристики буйковых уровнемеров
6. Техника безопасности при контроле расхода, количества и уровня
Глава 10. Контроль специальных параметров
2. Контроль влажности и запыленности газа
3. Контроь влажности сыпучих материалов
4. Контроль плотности жидкости
5. Техника безопасности при контроле специальных параметров
Раздел III. Автоматическое управление, контроль и регулирование
Глава 11. Системы автоматики с программным управлением
1. Общие принципы построения систем
2. Интуитивный метод разработки схем управления
3. Аналитический метод разработки схем управления
Глава 12. Автоматическая блокировка и защита в системах управления
1. Системы автоматической блокировки
2. Системы автоматической защиты
Глава 13. Системы автоматического контроля и сигнализации
2. Измерительные системы с цифровым отсчетом
3. Системы централизованного контроля
4. Системы автоматической сигнализации
Глава 14. Системы автоматического регулирования
1. Основные понятия и определения
2. Обыкновенные системы регулирования
3. Самонастраивающиеся системы регулирования
4. Качественные показатели автоматического регулирования
Глава 15. Объекты регулирования и их свойства
2. Параметры объектов регулирования
3. Определение основных свойств объектов
1. Классификация автоматических регуляторов
2. Регуляторы прерывистого (дискретного) действия
3. Регуляторы непрерівного действия
4. Выбор типа регуляторов и параметров его настройки
Формулы для определения параметров настройки регуляторов
Глава 17. Конструкции и характеристики регуляторов
1. Регуляторы прямого действия
2. Электрические регуляторы косвенного действия
3. Гидравлические регуляторы косвенного действия
4. Пневматические регуляторы косвенного действия
5. Техника безопасности при эксплуатации регуляторов
Раздел IV. Микропроцессорные системы
Глава 18. Общая характеристика микропроцессорных систем
1. Основные понятия и определения
2. Организация работы вычислительной машины
Глава 19. Математическое и программное обеспечение микроЭвм
2. Правила перевода одной системы счисления в другую
3. Формы представления чисел в эвм. Машинные коды
Глава 20. Внешние устройства микроЭвм
1. Классификация внешних устройств
2. Внешние запоминающие устройства
3. Устройства для связи эвм – оператор
4. Внешние устройства связи эвм с объектом
Глава 21. Применение микропроцессорных систем
1. Состав систем автоматики с применением микроЭвм
2. Управление производственными процессами
Раздел V. Промышленные роботы и роботизированные системы
Глава 22. Общие сведения о промышленных роботах
1. Основные определения и классификация промышленных роботов
2. Структура промышленных роботов
3. Основные технические показатели роботов
Глава 23. Конструкции промышленных роботов
1. Промышленные роботы агрегатно-модульного типа
Технические данные агрегатной гаммы промышленных роботов лм40ц.00.00 [9]
Технические характеристики и области обслуживания типового ряда промышленных роботов [9]
Технические данные модулей агрегатной гаммы рпм-25 [9]
2. Интерактивные промышленные роботы
3. Адаптивные промышленные роботы
5. Приводы промышленных роботов
Глава 24. Системы управления промышленными роботами
1. Назначение и классификация систем управления
2. Унифицированные системы управления
Технические данные унифицированных систем управления уцм [9]
Технические данные унифицированных систем управления упм [9]
Технические данные контурных систем управления укм [9]
Глава 25. Роботизация промышленного производства
1. Основные типы роботизированных систем
2. Гибкие производственные системы с применением промышленных роботов
3. Техника безопасности при эксплуатации роботов
Приложение Буквенные обозначения элементов электрических схем
Фоторезисторы (рис. 10, б) представляют собой стеклянную пластинку 1 с нанесенным тонким слоем селена или сернистых соединений различных металлов (таллия, висмута, кадмия, свинца). К пластине прикреплены электроды 2, имеющие контакт с полупроводниковым слоем. Размеры фоторезисторов очень невелики. При подаче к электродам напряжения через фоторезистор будет протекать ток, значение которого пропорционально освещенности. Зависимость тока от освещения имеет нелинейную величину. Однако чувствительность фоторезисторов в. сотни раз превышает чувствительность вакуумных элементов, что позволяет их использовать в автоматических устройствах без усилителей.
У вентильных преобразователей свободные электроны, изменяя свою энергию под действием светового потока, остаются в веществе. В промышленности получили наибольшее распространение селеновые и меднозакисные фотоэлементы.
Селеновый фотоэлемент (рис. 10, в) имеет четыре рабочих слоя. Первый слой образован тонкой пленкой золота 1, далее идут запирающий слой 2, селеновый слой 3 и стальная подкладка 4. Запирающий слой, обладая детекторным свойством, пропускает электроны, выделившиеся из пленки золота и препятствуют прохождению электронов противоположного направления. Таким образом, световой поток, проходя через пленку золота, создает вентильный фотоэффект, т.е. электроны из освещенного слоя переходят в неосвещенный. Это приводит к возникновению разности потенциалов Uвых.
Фотоэлектрические преобразователи просты по устройству и достаточно надежны в работе. Они находят широкое применение в системах автоматики в литейных и термических цехах: для автоматического управления освещением цехов, для измерения температуры жидкого металла и нагретых деталей (фотоэлектрический пирометр), определения прозрачности жидкостей или газов, подсчета форм и изделий, проходящих по конвейеру, для контроля пламени в топках топливных печей. Они применяются в системах защиты обслуживающего персонала от травм и т. п. В целом возможности фотоэлектрических преобразователей в металлургическом производстве чрезвычайно велики.
Контрольные вопросы и задания
1. Какие элементы автоматического управления (контроля) называются первичными преобразователями (датчиками)?
2. В чем заключается различие между параметрическими и генераторными преобразователями?
3. Расскажите об устройстве потенциометрических преобразователей,
4. Почему у индуктивных преобразователей статическая характеристика (вход-выход) нелинейная?
5. Расскажите об устройстве трансформаторного преобразователя.
6. Объясните принцип действия ферродииамического преобразователя.
7. Объясните принцип действия и назначение емкостных преобразователей.
8. В чем заключаются достоинства и недостатки тензометрических преобразователей?
9. Перечислите типы фотоэлектрических преобразователей и укажите их достоинства н недостатки.
10. Объясните принцип действия фотоэлектрических преобразователей.
Лабораторная работа 1. Исследование статических характеристик тензометрических преобразователей
Цель работы. Изучить конструкцию и принцип действия проволочных и фольговых тензорезисторов. Получить статические характеристики испытуемых преобразователей.
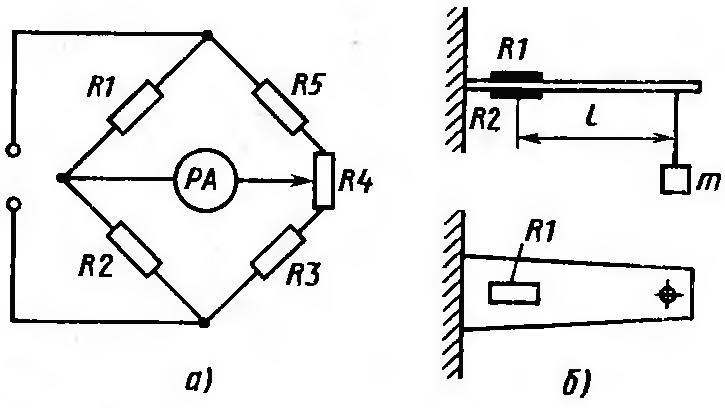
Рис. 11. Лабораторнаи установка для испытания тензорезисторов:
а – схема включення; б – схема нагружения
Описание лабораторной установки. Лабораторная установка представляет собой устройство (рис. 11) для испытаний тензорезисторов со схемой для получения основных характеристик тензорезисторов. С целью получения зависимостей выходной величины тензорезистора от приложенных усилий в схеме необходимо использовать приборы для измерения электрического тока.
Порядок выполнения работы. 1. Ознакомиться с преобразователями, установленными на стенде, и изучить электрическую схему соединений тензорезисторов и измерительного прибора. 2. Собрать электрическую схему испытаний (рис. 11, а). 3. Изменяя массу груза т от нуля до максимального и от максимального до нуля, снимают зависимости для тензорезисторов I = f (m). Для повышения чувствительности тензорезисторов два из них R1 и R2 наклеивают на стальную пластину сверху и снизу. 4. Результаты измерений заносят в протокол испытаний и по ним строят зависимость I = f (σ), где σ – напряжение изгиба, определяемое как отношение момента изгиба М к моменту сопротивления пластины N в месте наклейки терморезисторов; σ = M/N; М = mL; N = bh2/6, где b и h – ширина и высота пластины, м; I – расстояние от места приложения груза до центра тензорезистора, м.
Содержание отчета. Отчет должен содержать краткое описание принципа действия и назначение тензорезисторов, таблицу результатов испытаний, расчетные формулы и графики зависимостей выходных и входных величин.
Глава 3. Усилители и стабилизаторы
1. ОБЩИЕ СВЕДЕНИЯ И КЛАССИФИКАЦИЯ УСИЛИТЕЛЕЙ
Выходные сигналы первичных преобразователей и сигналы рассогласования регуляторов в большинстве случаев обладают небольшой мощностью и не могут быть непосредственно измерены или привести в действие исполнительный механизм. Поэтому сигнал усиливают до значения, которое позволяет либо ее измерить (в системах контроля), либо приводить в действие исполнительный механизм (в системах регулирования).
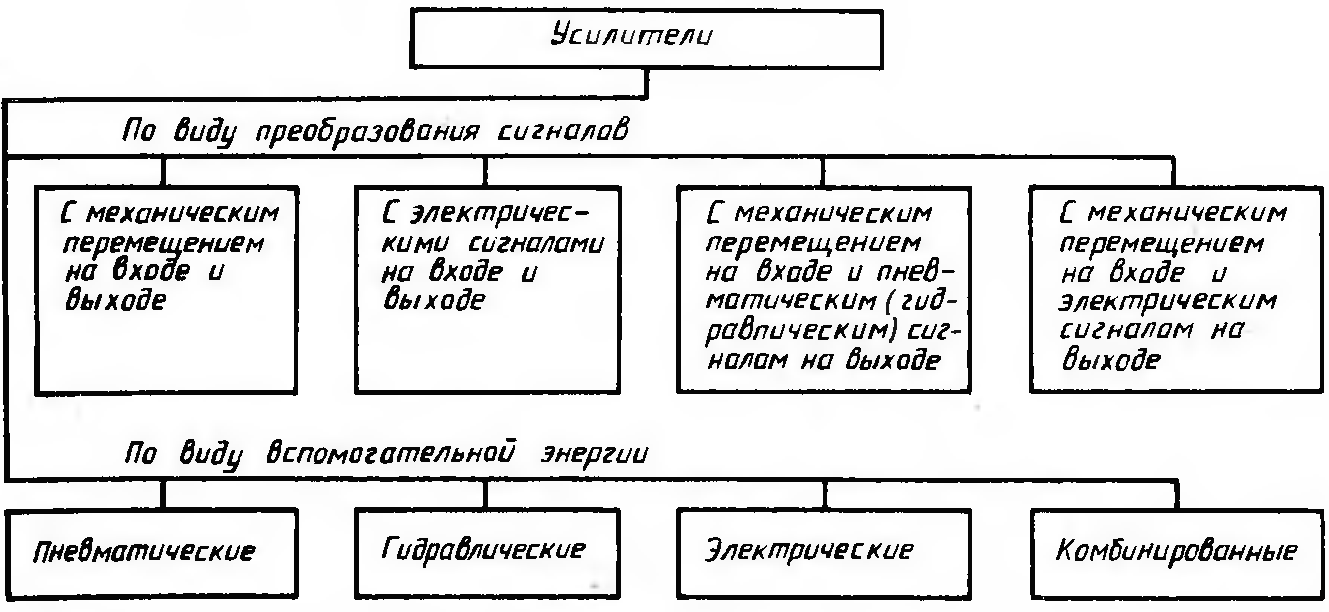
Рис. 12. Классификация усилителей
Усиление сигнала осуществляется устройством, называемым усилителем, путем изменения потока вспомогательной энергии, поступающей от источника к измерительному прибору или исполнительному механизму в соответствии со знаком и амплитудой сигнала. В некоторых случаях одновременно с усилением сигнала происходит его качественное преобразование. В связи с этим усилители можно разделить на четыре группы (рис. 12): с механическим перемещением на входе и выходе; с электрическим сигналом на входе и выходе; с механическим перемещением на входе и пневматическим или гидравлическим сигналом в виде изменения давления на выходе; с механическим перемещением на входе и электрическим сигналом на выходе.
Элементы, усиливающие механические перемещения, выполняют в виде рычажных устройств, механических регуляторов или механических и гидравлических муфт. Они имеют относительно небольшой коэффициент усиления.
Усилители электрических сигналов выполняют в виде электромеханических (реле), электромашинных, магнитных и электронных устройств.
Усилители, имеющие механическое перемещение на входе и пневматический или гидравлический сигнал в виде изменения давления на выходе, представляют собой вентиль, золотник или устройство типа сопло-заслонка (дроссельная заслонка).
Усилители, имеющие механическое перемещение на входе и электрический сигнал на выходе, представляют собой переменный резистор, автотрансформатор или замыкающиеся и размыкающиеся контакты реле.
В зависимости от вида применяемой вспомогательной энергии различают пневматические, гидравлические, электрические (электромеханические, магнитные), диэлектрические, электронные (полупроводниковые и тиристорные) и комбинированные усилители. В системах автоматики наибольшее распространение получили электрические усилители.
К основным характеристикам усилителей относятся выходная мощность, коэффициент усиления и форма статической характеристики. Выходная мощность усилителя определяется потребной мощностью исполнительного механизма и изменяется в весьма широких пределах (от долей ватт до десятков киловатт).
Коэффициент усиления является одной из основных характеристик усилителя. В электрических усилителях различают коэффициенты усиления по напряжению, току и мощности. Коэффициентом усиления по напряжению Kн называют отношение напряжения выходного сигнала Uвых к входному Uвх, т. е. Kн = Uвых/Uвх. Коэффициент усиления ПО току Kт определяет отношение тока выходного сигнала Iвых к входному току Iвх усилителя, т. е. Kт = Iвых/Iвх. Коэффициент усиления по мощности Км характеризует отношение выходной мощности Рвых к мощности на входе Рвх, т. е. Км = Рвых/Рвх.
Статическая характеристика усилителя отражает зависимость между входной и выходной величинами в установившемся режиме и может быть линейной и нелинейной. Наиболее предпочтительна линейная характеристика.

