ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 20.07.2024
Просмотров: 598
Скачиваний: 0

СОДЕРЖАНИЕ
А.Г. Староверов основы автоматизации производства
Глава 1. Общие сведения о системах автоматики и составляющих ее элементах
1. Основные понятия и определения
2. Классификация систем автоматического управления
3. Элементы автоматических систем
Глава 2. Первичные преобразователи
1. Общие сведения и классификация первичных преобразователей
2. Потенциометрические первичные преобразователи
3. Индуктивные первичные преобразователи
4. Емкостные первичные преобразователи
5. Тензометрические первичные преобразователи
6. Фотоэлектрические первичные преобразователи
Глава 3. Усилители и стабилизаторы
2. Электромеханические и магнитные усилители
Глава 4. Переключающие устройства и распределители
3. Контактные аппараты управления
4. Бесконтактные устройства управления
Наименование н обозначение логических функций н элементов
Глава 5. Задающие и исполнительные устройства
1. Классификация задающих и исполнительных устройств
3. Электрические исполнительные механизмы
Раздел II. Контрольно-измерительные приборы и техника измерения параметров технологических процессов
Глава 6. Общие сведения об измерении и контроле
1. Основные метрологические понятия техники измерения и контроля
3. Методы измерения и классификация. Контрольно-измерительных приборов
1. Температурные шкалы. Классификация технических приборов и устройств измерения температуры
Технические характеристики стеклинных ртутных, термометров типа тт
Технические характеристики дилатометрических гермометров
Характеристики манометрических термометров
4. Термоэлектрические термометры
Основные характеристики термоэлектрических термометров
Технические характеристики милливольтметров
5. Термометры сопротивления и термисторы
Технические характеристики термометров сопротивления
6. Бесконтактное измерение температуры
7. Техника безопасности при контроле температуры
Глава 8. Контроль давления и разрежения
1. Общие сведения и классификация приборов
Технические характеристики показывающих и сигнализирующих манометров
Технические характеристики тягомеров, напоромеров и тягонапоромеров
Технические характеристики промышленных вакуумметров
5. Техника безопасности при контроле давления
Глава 9. Контроль расхода, количества и уровня
1. Общие сведения и классификация приборов
Технические характеристики ротаметров
Технические характеристики шариковых расходомеров
Технические характеристики счетчиков жидкостей и газов
4. Счетчики и весы твердых и сыпучих материалов
5. Уровнемеры жидкостей и сыпучих материалов
Технические характеристики поплавковых уровнемеров с пружинным уравновешиванием
Технические характеристики буйковых уровнемеров
6. Техника безопасности при контроле расхода, количества и уровня
Глава 10. Контроль специальных параметров
2. Контроль влажности и запыленности газа
3. Контроь влажности сыпучих материалов
4. Контроль плотности жидкости
5. Техника безопасности при контроле специальных параметров
Раздел III. Автоматическое управление, контроль и регулирование
Глава 11. Системы автоматики с программным управлением
1. Общие принципы построения систем
2. Интуитивный метод разработки схем управления
3. Аналитический метод разработки схем управления
Глава 12. Автоматическая блокировка и защита в системах управления
1. Системы автоматической блокировки
2. Системы автоматической защиты
Глава 13. Системы автоматического контроля и сигнализации
2. Измерительные системы с цифровым отсчетом
3. Системы централизованного контроля
4. Системы автоматической сигнализации
Глава 14. Системы автоматического регулирования
1. Основные понятия и определения
2. Обыкновенные системы регулирования
3. Самонастраивающиеся системы регулирования
4. Качественные показатели автоматического регулирования
Глава 15. Объекты регулирования и их свойства
2. Параметры объектов регулирования
3. Определение основных свойств объектов
1. Классификация автоматических регуляторов
2. Регуляторы прерывистого (дискретного) действия
3. Регуляторы непрерівного действия
4. Выбор типа регуляторов и параметров его настройки
Формулы для определения параметров настройки регуляторов
Глава 17. Конструкции и характеристики регуляторов
1. Регуляторы прямого действия
2. Электрические регуляторы косвенного действия
3. Гидравлические регуляторы косвенного действия
4. Пневматические регуляторы косвенного действия
5. Техника безопасности при эксплуатации регуляторов
Раздел IV. Микропроцессорные системы
Глава 18. Общая характеристика микропроцессорных систем
1. Основные понятия и определения
2. Организация работы вычислительной машины
Глава 19. Математическое и программное обеспечение микроЭвм
2. Правила перевода одной системы счисления в другую
3. Формы представления чисел в эвм. Машинные коды
Глава 20. Внешние устройства микроЭвм
1. Классификация внешних устройств
2. Внешние запоминающие устройства
3. Устройства для связи эвм – оператор
4. Внешние устройства связи эвм с объектом
Глава 21. Применение микропроцессорных систем
1. Состав систем автоматики с применением микроЭвм
2. Управление производственными процессами
Раздел V. Промышленные роботы и роботизированные системы
Глава 22. Общие сведения о промышленных роботах
1. Основные определения и классификация промышленных роботов
2. Структура промышленных роботов
3. Основные технические показатели роботов
Глава 23. Конструкции промышленных роботов
1. Промышленные роботы агрегатно-модульного типа
Технические данные агрегатной гаммы промышленных роботов лм40ц.00.00 [9]
Технические характеристики и области обслуживания типового ряда промышленных роботов [9]
Технические данные модулей агрегатной гаммы рпм-25 [9]
2. Интерактивные промышленные роботы
3. Адаптивные промышленные роботы
5. Приводы промышленных роботов
Глава 24. Системы управления промышленными роботами
1. Назначение и классификация систем управления
2. Унифицированные системы управления
Технические данные унифицированных систем управления уцм [9]
Технические данные унифицированных систем управления упм [9]
Технические данные контурных систем управления укм [9]
Глава 25. Роботизация промышленного производства
1. Основные типы роботизированных систем
2. Гибкие производственные системы с применением промышленных роботов
3. Техника безопасности при эксплуатации роботов
Приложение Буквенные обозначения элементов электрических схем
Время полного запаздывания τп складывается из двух составляющих: времени транспортного (или чистого) запаздывания τт и времени емкостного (или инерционного) запаздывания τе.
Транспортное запаздывание – это время, в течение которого регулируемая величина не изменяется, несмотря на произведенное регулирующее воздействие. Например, при изменении напряжения на нагревательных элементах электрической печи потребуется определенное время, пока установится новый тепловой поток, что повлияет в конечном итоге на время начала изменения температуры.
Продолжительность транспортного запаздывания зависит от расстояния между регулирующим органом и чувствительном элементом первичного преобразователя, от нагрузки и емкости объекта. Например, транспортное запаздывание уменьшается при расположении термопары в непосредственной близости от нагревательных элементов. Чем больше нагрузка, тем меньше транспортное запаздывание, а чем больше емкость объекта, тем больше время транспортного запаздывания. Такое запаздывание затрудняет регулирование, и следует всегда стремиться к его уменьшению.
Емкостным запаздыванием называется запаздывание, зависящее от термических, гидравлических и других сопротивлений между емкостями объекта. Оно определяется как интервал времени, затраченный на преодоление межъемкостных сопротивлений. Например, в муфельной печи емкостным запаздыванием будет время с момента возникновения теплового потока от нагревательных элементов до момента изменения температуры муфеля.
Емкостное запаздывание тем больше, чем больше число последовательно включенных емкостей и чем больше их значения.
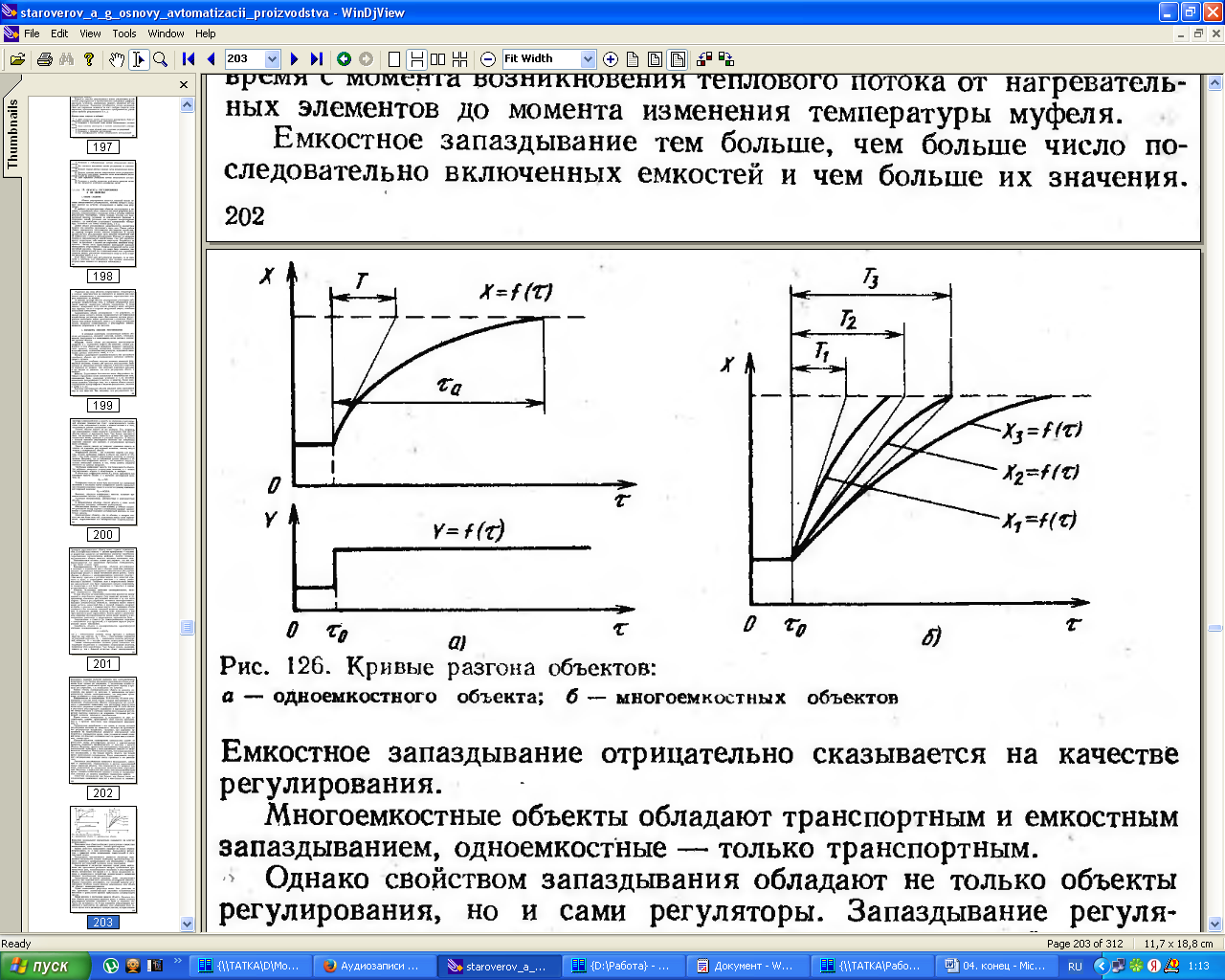
Рис. 126. Кривые разгона объектов:
а – одноемкостного объекта; б – многоемкостных объектов
Емкостное запаздывание отрицательно сказывается на качестве регулирования.
Многоемкостные объекты обладают транспортным и емкостным запаздыванием, одноемкостные – только транспортным.
Однако свойством запаздывания обладают не только объекты регулирования, но и сами регуляторы. Запаздывание регулятора – суммарное время запаздывания измерительной и регулирующей систем.
Запаздывание чувствительных элементов регулятора определяется тем временем, которое необходимо чувствительному элементу первичного преобразователя для обнаружения в объекте изменения регулируемой величины после возмущения.
Запаздывание в регуляторе включает также время, необходимое для преодоления различных зазоров, срабатывания промежуточных реле, исполнительного механизма и регулирующего органа, преодоления сил трения и т. п. Время преодоления зазоров в механических устройствах исполнительного механизма называют запаздыванием корректировки.
Запаздывание регулятора вызывает выбег регулирующего органа и, как следствие этого, отклонение регулируемой величины. Процесс успокоения затягивается, что ухудшает качество регулирования. Особенно опасно влияние запаздывания, если объект не обладает самовыравниванием.
Время запаздывания регулятора может быть уменьшено за счет применения соответствующей настройки исполнительного механизма и уменьшения времени срабатывания регулирующего органа.
Время разгона и постоянная времени объекта. Временем разгона объекта регулирования называют время, в течение которого регулируемая величина изменяется от нуля до заданного значения при мгновенном 100%-ном изменении регулирующего воздействия и постоянстве его действия. Для объяснения этого понятия лучше всего рассмотреть кривую разгона, которая показывает изменение регулируемой величины во времени. Такую кривую можно получить, если скачкообразно изменить регулирующее воздействие и записать изменение регулируемой величины для различных моментов времени.
На рис. 126, а изображена кривая разгона X = f (τ) объекта с самовыравниванием, которая показывает изменение значения регулируемой величины при мгновенном изменении регулирующего воздействия Y. Время разгона та определяется продолжительностью переходного процесса от момента подачи регулирующего воздействия до момента достижения регулируемой величиной максимального значения. Максимальное значение регулируемой величины отличается от установившегося значения не более чем на 1 %.
Время разгона является мерой инерционности объекта. Оно возрастает с увеличением емкости объекта.
Постоянная времени объекта – это время его разгона при отсутствии самовыравнивания. Значение постоянной времени Т объекта можно определить, если провести касательную к начальной точке кривой разгона (рис. 126, а). Отрезок, отсекаемый этой касательной на прямой, параллельной оси абсцисс, представляет собой постоянную времени объекта Т.
Время разгона та и постоянная времени объекта Т связаны между собой соотношением τа = ŋТ, где ŋ – коэффициент нагрузки объекта, который равен отношению нагрузки объекта при рассматриваемом режиме к максимальной .нагрузке.
Постоянная времени объекта Т связана с чувствительностью v и степенью самовыравнивания р соотношением Т = l/(νρ).
На рис. 126, б показаны кривые разгона, объектов с различным числом емкостей. Значения постоянных времени различных объектов неодинаковы. С увеличением числа емкостей увеличивается постоянная времени объекта. А чем она больше, тем хуже поддается объект регулированию.
3. Определение основных свойств объектов
Для определения основных свойств объектов используются следующие методы: метод переходных характеристик (кривых разгона); метод импульсных возмущений (прямоугольного волнового импульса); частотный метод; метод прямоугольной волны; статический метод.
Все перечисленные методы, кроме последнего, основаны да изучении поведения объекта при различного вида возмущениях.
Наиболее широко применяется метод переходных характеристик (кривых разгона). После соответствующего анализа и обработки кривой разгона (рис. 127) можно определить время запаздывания и природу его происхождения, т. е. τт, τе, и полное запаздывание τп; время разгона τа и постоянную времени объекта Т; степень самовыравнивания ρ; скорость разгона ε.
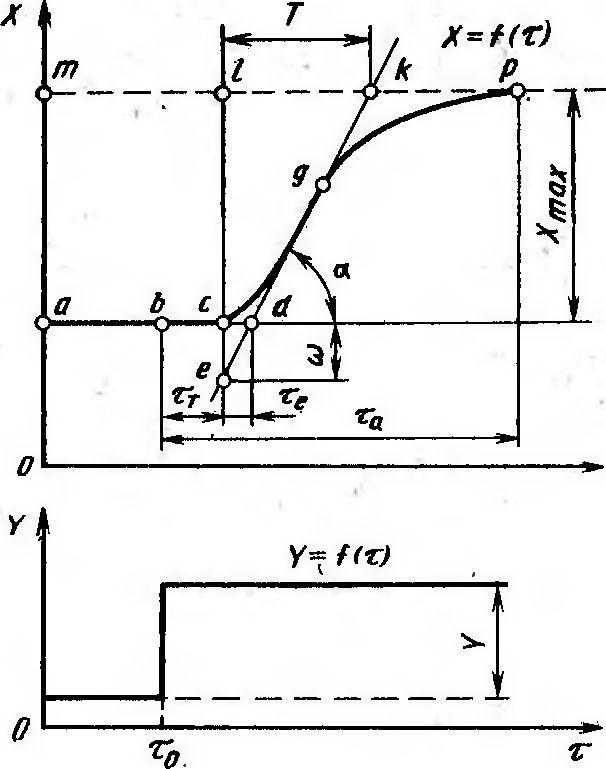
Рис. 127. Кривая разгона для определения свойств объекта
Времени транспортного запаздывания τт на кривой разгона соответствует отрезок bс между временем возмущения т0 и моментом изменения регулируемой величины.
Для определения времени емкостного запаздывания проводят линию ас начального значения регулируемой величины и находят точку максимальной скорости ее изменения (точка перегиба g, после которой скорость снижается). Через точку g проводят касательную до пересечения ее с линией ас; полеченный отрезок cd и есть время емкостного запаздывания τе.
На основании найденных значений τт и τe определяют время полного запаздывания τп = τт + τте.
Время разгона τа – время между моментом внесения возмущения и моментом достижения регулируемой величиной максимального значения.
Чтобы определить постоянную времени объекта Т проводят горизонтальную линию mр через новое установившееся значение регулируемой величины, затем – касательную eg до пересечения ее с линией mр в точке k и вертикаль от точки с до точки l; отрезок lk (в масштабе) и соответствует постоянной времени объекта Т.
Величина Т позволяет судить об общей продолжительности самовыравнивания и характере изменения регулируемой величиной во времени. Например, для одноемкостного объекта регулирования по истечении времени с момента, когда закончилось транспортное запаздывание (в объектах с запаздыванием), или с Момента возмущения (объект без запаздывания) регулируемая величина, достигнув точки g, составит 63,2% предельного отклонения Хmах, что вызвано этим возмущением.
Соответственно через время 2Т регулируемая величина достигает значения 0,865Хmах; через 3Т –значения 0,956Хmах; через 4T – значения 0,99Хmaх, т. е. к этому времени процесс самовыравнивания практически закончится.
Степень самовыравнивания ρ определяют из соотношения ρ = Y/Xmax. По степени самовыравнивания ρ находят коэффициент усиления К0 (К0 = 1/ρ), показывающий, насколько существенно изменяется регулируемая величина от изменения положения регулирующего органа.
Скорость разгона ε, или максимальную скорость изменения регулируемой величины X в процессе самовыравнивания, определяют для одноемкостного объекта, проводя через точку с вертикаль до пересечения с касательной в точке е и линию, параллельную ad, через точку е; отрезок ес и дает в масштабе скорость разгона е.
Тангенс угла наклона касательной α выражает скорость изменения регулируемой величины X.
Полученные данные, т. е. значения τп, τа, Т, ρ и ε, позволяют судить о динамических свойствах объекта регулирования, на основании которых выбирается регулятор и определяются параметры его настройки, обеспечивающие устойчивость и высокие качественные показатели системы автоматического регулирования. Снятие кривой разгона проводят не менее трех раз при различных возмущениях.
Контрольные вопросы и задания
1. Что такое объект регулирования?
2. Что называется нагрузкой и как она влияет на процесс регулирования?
3. Что называется емкостью и как она влияет на процесс регулирования?
4. Что называется самовыравниванием и как оно влияет на процесс регулирования?
5. Что такое время запаздывания и как оно влияет на процесс регулирования?
6. Что характеризуют время разгона и постоянная времени объекта?
7. Расскажите о способах определения свойств объектов регулирования.
8. Какие кривые называют кривыми разгона и как они строятся?
Лабораторная работа 5. Экспериментальное определение динамических характеристик объектов регулирования
Содержание работы. Овладеть методами и навыками определения основных свойств объекта регулирования.
Описание лабораторной установки. В качестве объекта регулирования в работе рассматривается лабораторная электрическая печь сопротивления, а для записи кривой разгона используется самопишущий потенциометр ЭПП-09. В схеме лабораторной установки для определения кривой разгона электрической печи (рис. 128) электронагреватели Н включены в сеть через резистор R1, рассчитанный на понижение напряжения с 220 В до 190 В. Печь 2 нагревается до установления постоянной температуры, которая фиксируется с помощью системы, состоящей из термопары ТП (первичный преобразователь), подключенной к потенциометру 1. После стабилизации температуры дается выдержка 2 ... 3 мин. Затем включается потенциометр и замыкается контакт QS. В результате напряжение на нагревательных элементах повышается примерно на 15%. Это изменение напряжения соответствует скачкообразному изменению возмущения, которое будет зафиксировано через резистор R2 потенциометром. Одновременно потенциометр ведет запись t – f (τ), т. е. кривую разгона объекта.

