ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 20.07.2024
Просмотров: 660
Скачиваний: 0

СОДЕРЖАНИЕ
А.Г. Староверов основы автоматизации производства
Глава 1. Общие сведения о системах автоматики и составляющих ее элементах
1. Основные понятия и определения
2. Классификация систем автоматического управления
3. Элементы автоматических систем
Глава 2. Первичные преобразователи
1. Общие сведения и классификация первичных преобразователей
2. Потенциометрические первичные преобразователи
3. Индуктивные первичные преобразователи
4. Емкостные первичные преобразователи
5. Тензометрические первичные преобразователи
6. Фотоэлектрические первичные преобразователи
Глава 3. Усилители и стабилизаторы
2. Электромеханические и магнитные усилители
Глава 4. Переключающие устройства и распределители
3. Контактные аппараты управления
4. Бесконтактные устройства управления
Наименование н обозначение логических функций н элементов
Глава 5. Задающие и исполнительные устройства
1. Классификация задающих и исполнительных устройств
3. Электрические исполнительные механизмы
Раздел II. Контрольно-измерительные приборы и техника измерения параметров технологических процессов
Глава 6. Общие сведения об измерении и контроле
1. Основные метрологические понятия техники измерения и контроля
3. Методы измерения и классификация. Контрольно-измерительных приборов
1. Температурные шкалы. Классификация технических приборов и устройств измерения температуры
Технические характеристики стеклинных ртутных, термометров типа тт
Технические характеристики дилатометрических гермометров
Характеристики манометрических термометров
4. Термоэлектрические термометры
Основные характеристики термоэлектрических термометров
Технические характеристики милливольтметров
5. Термометры сопротивления и термисторы
Технические характеристики термометров сопротивления
6. Бесконтактное измерение температуры
7. Техника безопасности при контроле температуры
Глава 8. Контроль давления и разрежения
1. Общие сведения и классификация приборов
Технические характеристики показывающих и сигнализирующих манометров
Технические характеристики тягомеров, напоромеров и тягонапоромеров
Технические характеристики промышленных вакуумметров
5. Техника безопасности при контроле давления
Глава 9. Контроль расхода, количества и уровня
1. Общие сведения и классификация приборов
Технические характеристики ротаметров
Технические характеристики шариковых расходомеров
Технические характеристики счетчиков жидкостей и газов
4. Счетчики и весы твердых и сыпучих материалов
5. Уровнемеры жидкостей и сыпучих материалов
Технические характеристики поплавковых уровнемеров с пружинным уравновешиванием
Технические характеристики буйковых уровнемеров
6. Техника безопасности при контроле расхода, количества и уровня
Глава 10. Контроль специальных параметров
2. Контроль влажности и запыленности газа
3. Контроь влажности сыпучих материалов
4. Контроль плотности жидкости
5. Техника безопасности при контроле специальных параметров
Раздел III. Автоматическое управление, контроль и регулирование
Глава 11. Системы автоматики с программным управлением
1. Общие принципы построения систем
2. Интуитивный метод разработки схем управления
3. Аналитический метод разработки схем управления
Глава 12. Автоматическая блокировка и защита в системах управления
1. Системы автоматической блокировки
2. Системы автоматической защиты
Глава 13. Системы автоматического контроля и сигнализации
2. Измерительные системы с цифровым отсчетом
3. Системы централизованного контроля
4. Системы автоматической сигнализации
Глава 14. Системы автоматического регулирования
1. Основные понятия и определения
2. Обыкновенные системы регулирования
3. Самонастраивающиеся системы регулирования
4. Качественные показатели автоматического регулирования
Глава 15. Объекты регулирования и их свойства
2. Параметры объектов регулирования
3. Определение основных свойств объектов
1. Классификация автоматических регуляторов
2. Регуляторы прерывистого (дискретного) действия
3. Регуляторы непрерівного действия
4. Выбор типа регуляторов и параметров его настройки
Формулы для определения параметров настройки регуляторов
Глава 17. Конструкции и характеристики регуляторов
1. Регуляторы прямого действия
2. Электрические регуляторы косвенного действия
3. Гидравлические регуляторы косвенного действия
4. Пневматические регуляторы косвенного действия
5. Техника безопасности при эксплуатации регуляторов
Раздел IV. Микропроцессорные системы
Глава 18. Общая характеристика микропроцессорных систем
1. Основные понятия и определения
2. Организация работы вычислительной машины
Глава 19. Математическое и программное обеспечение микроЭвм
2. Правила перевода одной системы счисления в другую
3. Формы представления чисел в эвм. Машинные коды
Глава 20. Внешние устройства микроЭвм
1. Классификация внешних устройств
2. Внешние запоминающие устройства
3. Устройства для связи эвм – оператор
4. Внешние устройства связи эвм с объектом
Глава 21. Применение микропроцессорных систем
1. Состав систем автоматики с применением микроЭвм
2. Управление производственными процессами
Раздел V. Промышленные роботы и роботизированные системы
Глава 22. Общие сведения о промышленных роботах
1. Основные определения и классификация промышленных роботов
2. Структура промышленных роботов
3. Основные технические показатели роботов
Глава 23. Конструкции промышленных роботов
1. Промышленные роботы агрегатно-модульного типа
Технические данные агрегатной гаммы промышленных роботов лм40ц.00.00 [9]
Технические характеристики и области обслуживания типового ряда промышленных роботов [9]
Технические данные модулей агрегатной гаммы рпм-25 [9]
2. Интерактивные промышленные роботы
3. Адаптивные промышленные роботы
5. Приводы промышленных роботов
Глава 24. Системы управления промышленными роботами
1. Назначение и классификация систем управления
2. Унифицированные системы управления
Технические данные унифицированных систем управления уцм [9]
Технические данные унифицированных систем управления упм [9]
Технические данные контурных систем управления укм [9]
Глава 25. Роботизация промышленного производства
1. Основные типы роботизированных систем
2. Гибкие производственные системы с применением промышленных роботов
3. Техника безопасности при эксплуатации роботов
Приложение Буквенные обозначения элементов электрических схем
3. Гидравлические регуляторы косвенного действия
При автоматизации технологических процессов, связанных с применением регулирующих органов, требующих для приведения их в движение больших усилий, особенно при поступательном движении, целесообразно использовать гидравлические исполнительные механизмы. В этой связи созданы различные комбинированные электронно-гидравлические регуляторы, в которых точность и компактность электрических измерительных и командных устройств сочетается с преимуществами гидравлических исполнительных элементов.
Электронно-гидравлическая система автоматического регулирования «Кристалл», получившая довольно большое распространение, представляет собой комплекс приборов и устройств, с помощью которых могут быть осуществлены регуляторы различной структуры, эта система предназначена, для автоматизации теплотехнических процессов энергетического оборудования средней и малой мощности.
Рассмотрим принцип работы электронно-гидравлического регулятора (рис. 141). Первичные преобразователи 1 (не более трех) измеряют регулируемую величину и преобразуют ее в сигналы переменного тока. В транзисторном усилителе 2 эти сигналы суммируются между собой и с сигналом задатчика 3, усиливаются и подаются на обмотки электрогидравлического реле 5, управляющего гидравлическим исполнительным механизмом 6. Устройство обратной связи 7 преобразует перемещение вала исполнительного механизма в электрический сигнал, который подается на вход усилителя. Дистанционное управление осуществляется с помощью блока 4 с пульта 8.
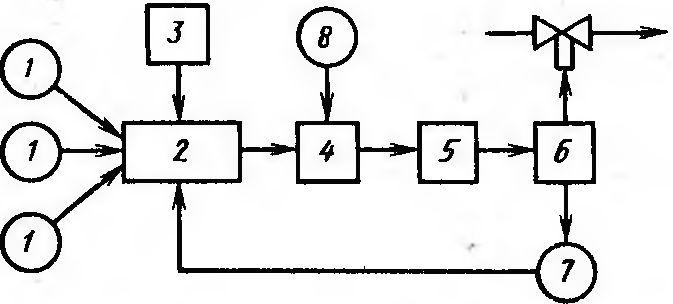
Рис. 141. Структурная схема электронйо-гидравлического регулятора системы «Кристалл»
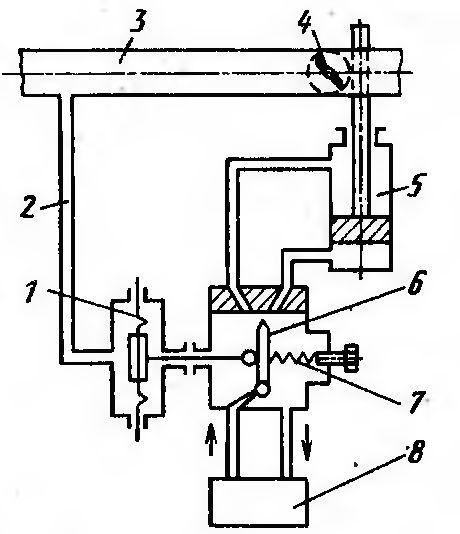
Рис. 142. Схема гидравлического струйного регулятора
В комплекте с электронно-гидравлическим регулятором применяются первичные преобразователи: дифференциальные тягометы, электрические манометры, термометры сопротивления и термоэлектрические термометры. В системе регулирования «Кристалл» могут быть реализованы И-, П- и ПИ-законы регулирования. Эти регуляторы позволяют регулировать температуру, давление, расход или уровень, тягу или напор, соотношение «топливо (газ)-воздух» и другие параметры.
Наряду с рассмотренными электрогидравлическими регуляторами находят применение также и гидравлические струйные регуляторы. Их используют для регулирования давления, расхода и уровня.
Ниже в качестве примера рассмотрено устройство гидравлического струйного регулятора давления (рис. 142). Мембранный измерительный элемент 1 соединяется с объектом регулирования (воздухо- или газопроводом) 3 с помощью трубки 2. Входной величиной измерительного элемента является давление, а выходной – перемещение потока. В качестве усилительного преобразующего элемента используется струйная трубка 6, вспомогательная энергия к которой подводится от маслонапорной установки 8. Струйная трубка преобразует поступательное движение штока в кинетическую энергию движущейся масляной струи. Энергия струи в несколько раз больше, чем энергия перемещающегося штока. Исполнительное устройство состоит из исполнительного механизма (гидроцилиндра) 5 и регулирующего органа (поворотной заслонки) 4.
Регулятор работает следующим образом. При снижении давления газа в трубе 3 мембрана измерительного элемента 1 перемещается влево. Под действием пружины настройки 7 струйная трубка 6 переместится влево и заставит перемещаться шток исполнительного механизма 5 вверх, что приведет к открыванию заслонки 4. Приток газа или воздуха увеличится, а давление повысится.
Промышленность выпускает унифицированные узлы для агрегатного комплектования гидравлических струйных регуляторов типа РАГС (регулятор автоматический гидравлический струйный) и регуляторов типа КИП для воздуходувных установок.
Чувствительные элемёнты таких регуляторов предназначены для восприятия давления, разрежения или перепада давления контролируемой среды и преобразования их в усилия, передаваемые системой рычагов на струйную трубку гидравлического усилителя.
Струйные регуляторы РАГС используют для автоматического поддержания постоянного давления (разрежения) газа или жидкости в диапазоне 0...10 МПа, а также постоянного расхода жидкости или газа и постоянного соотношения давлений или расхода двух жидкостей или газов.
Регуляторы давления КИП для воздуходувных установок применяются в общей схеме регулирования для защиты их от помпажа и создания постоянства давления в нагнетательном трубопроводе. Верхний предел регулирования 4,5 МПа. Зона нечувствительности 60 ... 1500 Па.
4. Пневматические регуляторы косвенного действия
В пневматических регуляторах взаимодействие между отдельными элементами и воздействие на регулирующий орган осуществляются с помощью сжатого воздуха.
Основным элементом пневматических регуляторов является устройство типа сопло-заслонка, в котором механическое перемещение чувствительного элемента преобразуется в сигнал сжатого воздуха.
В качестве примера рассмотрим работу пневматического регулятора давления РД, предназначенного для поддержания заданного давления неагрессивных паров или газов.
Регулируемое давление (рис. 143) подводится к манометрической пружине 4. К свободному концу пружины присоединена заслонка 6, которая опирается на подвижный упор 3 и под действием пружины 2 стремится прикрыть сопло 7. К последнему по линии питания через постоянный дроссель 1 подводится сжатый воздух. Проходное сечение дросселя 1 меньше проходного сечения сопла 7, поэтому перемещение заслонки относительно сопла при изменениях регулируемого давления вызывает изменение выходного давления в командной линии регулятора. Таким образом, систему сопло-заслонка можно рассматривать как дроссель переменного сечения. Следовательно, изменяя положение заслонки, можно регулировать давление сжатого воздуха, поступающего на исполнительный механизм.
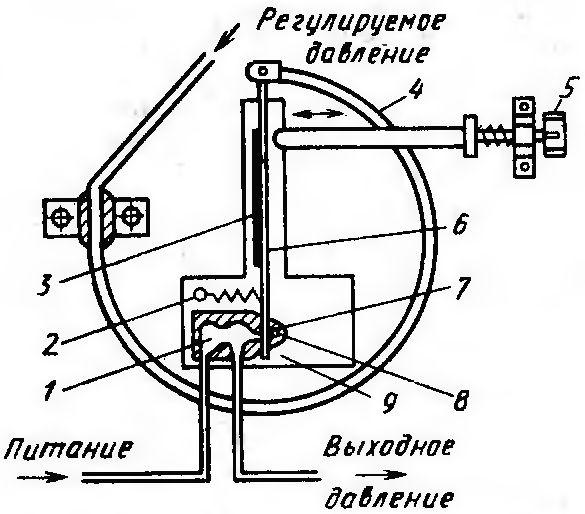
Рис. 143. Схема регулятора давления типа РД
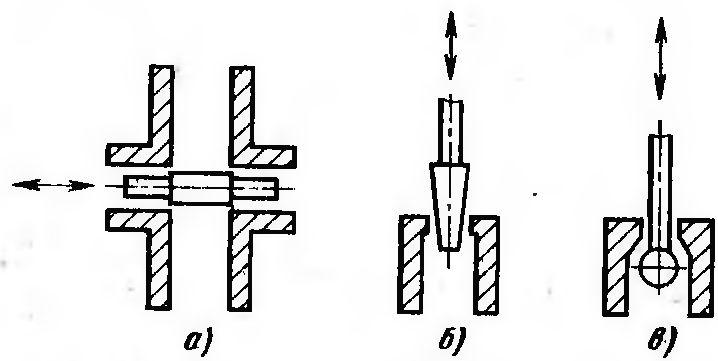
Рис. 144. Исполнительные дросселирующие устройства типа сопло-заслонка: а – золотник; б – игла; в – шарик
Изменение регулируемого давления приводит к перемещению свободного конца манометрической пружины и соответственно заслонки относительно сопла, вследствие чего меняется выходное давление регулятора. На исполнительный механизм оказывается регулирующее воздействие, и регулируемое давление приводится к заданному значению. Регулятор настраивается на заданное значение регулируемой величины задатчиком 5, с помощью которого можно поворачивать плату 9 с заслонкой 6 вокруг оси 8. Настройка степени неравномерности в диапазоне 5 ... 50 % осуществляется передвижением упора 3.
Регулятор РД может быть настроен на прямое и обратное действие. В первом случае при повышении регулируемого давления давление командного сигнала (сжатого воздуха) возрастает от 0 до 100 кПа; при установке на обратное действие увеличение регулируемого давления вызывает понижение командного давления от 100 кПа до 0.
Пределы регулирования давления регуляторов РД в зависимости от типа изменяются от 100 кПа до 2,4 МПа. Давление сжатого воздуха, подводимого к регулятору, должно быть в пределах 127 ... 147 кПа.
В пневматических регуляторах, помимо описанного, применяются и другие исполнения устройств типа сопло-заслонка: дросселирующий золотник (рис. 144, а), дросселирующая игла (рис. 144, б) и дросселирующий шарик (рис. 144, в).
Учитывая большое сходство в конструкциях различных пневматических регуляторов, ограничимся рассмотрением только регулятора типа 04. Этот регулятор может встраиваться в компенсационные измерительные приборы, образуя системы регулирования температуры, давления, расхода и других параметров. По характеру регулирующего воздействия регулятор 04 является пропорционально-интегральным и осуществляет регулирование с изодромной обратной связью.
Регулируемое давление подводится к манометрической пружине 4 (рис. 145), которая раскручивается или скручивается при его изменении. Деформация пружины с помощью системы рычагов вызывает перемещение заслонки 7 относительно сопла 6. К соплу через дроссель 8 непрерывно подается сжатый воздух по трубке 9. Так как проходное сечение трубки в несколько раз больше сечения дросселя, то перемещение заслонки вызывает изменение давления воздуха, поступающего в камеру пневматического реле 14. Мембранная коробка 15 этого реле через шток 13 перемещает золотник 12, дросселирующий поток воздуха через сопла 11 и 10.
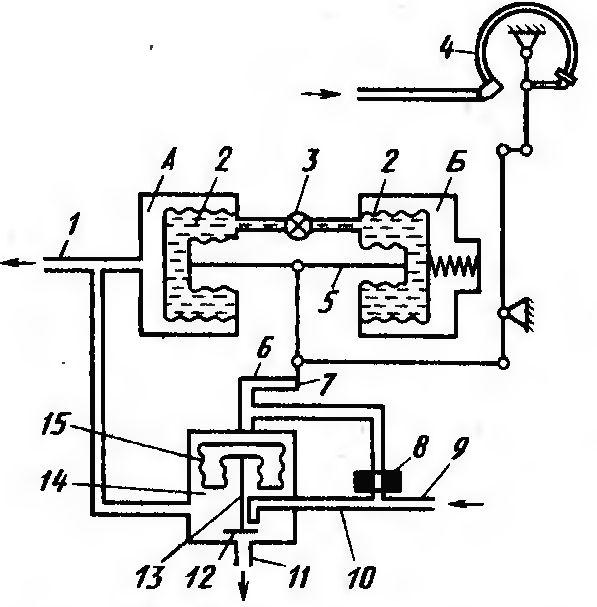
Рис. 145. Схема пневматического регулятора давления типа 04
Если сопло 6 полностью открыто, то давление под мембраной равно атмосферному и золотник 12 прикрывает собой сопло 10. Одновременно через выпускное сопло 11 золотник соединяет с атмосферой идущую к исполнительному механизму командную линию, отчего давление под мембраной исполнительного механизма снижается до атмосферного и клапан занимает крайнее положение, например закрывается. Если сопло 6 полностью перекрыто заслонкой, то золотник закрывает сопло 11 и открывает сопло 10, через которое воздух подается в командную линию 1. Давление над мембраной клапана повышается, и он занимает второе крайнее положение. При промежуточных положениях заслонки клапан занимает промежуточное положение.
Устройство обратной связи состоит из двух пар сильфонов 2, помещенных в камеры А и Б. Пространство между внутренними и наружными сильфонами заполнено толуолом. Внутренние сильфоны соединены штоком 5, а жидкостные полости сообщаются по трубке с игольчатым вентилем 3.
При пропорционально-интегральном регулировании игольчатый вентиль 3 открыт, т. е. сообщаются жидкостные полости сильфонов. Скорость перетекания жидкости из полости в полость зависит от степени открытия вентиля и от разности давления в камерах А и Б. Когда рассогласования нет и значение регулируемой величины равно заданному, давления жидкости в полостях А и Б равны.
Если давление в командной линии начнет увеличиваться, то механизм обратной связи отодвинет заслонку 7 от сопла 6. Поскольку давление в полости А больше давления в полости Б, то жидкость начнет перетекать через игольчатый вентиль 3 из полости А в полость Б, шток будет перемещаться влево и постепенно давление в обеих полостях выравняется. Но при этом заслонка опять приблизится к соплу, и командное давление увеличится, в результате чего регулирующий орган переместится и займет новое положение, обеспечивающее нормальное течение процесса при изменившихся условиях. Это значит, что исполнительный механизм при значении регулируемой величины, равной заданному, займет новое положение, при котором регулирующе воздействие компенсирует внешнее возмущение.
Такая обратная связь, при которой устраняется статическая неравномерность, называется изодромной.
Регулятор типа 04 дает на выходе пневматический сигнал давлением 0 ... 100 кПа. Для питания регулятора используете) подаваемый через фильтр очищенный сжатый воздух давлением 140 кПа.

