ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 20.07.2024
Просмотров: 740
Скачиваний: 0

СОДЕРЖАНИЕ
А.Г. Староверов основы автоматизации производства
Глава 1. Общие сведения о системах автоматики и составляющих ее элементах
1. Основные понятия и определения
2. Классификация систем автоматического управления
3. Элементы автоматических систем
Глава 2. Первичные преобразователи
1. Общие сведения и классификация первичных преобразователей
2. Потенциометрические первичные преобразователи
3. Индуктивные первичные преобразователи
4. Емкостные первичные преобразователи
5. Тензометрические первичные преобразователи
6. Фотоэлектрические первичные преобразователи
Глава 3. Усилители и стабилизаторы
2. Электромеханические и магнитные усилители
Глава 4. Переключающие устройства и распределители
3. Контактные аппараты управления
4. Бесконтактные устройства управления
Наименование н обозначение логических функций н элементов
Глава 5. Задающие и исполнительные устройства
1. Классификация задающих и исполнительных устройств
3. Электрические исполнительные механизмы
Раздел II. Контрольно-измерительные приборы и техника измерения параметров технологических процессов
Глава 6. Общие сведения об измерении и контроле
1. Основные метрологические понятия техники измерения и контроля
3. Методы измерения и классификация. Контрольно-измерительных приборов
1. Температурные шкалы. Классификация технических приборов и устройств измерения температуры
Технические характеристики стеклинных ртутных, термометров типа тт
Технические характеристики дилатометрических гермометров
Характеристики манометрических термометров
4. Термоэлектрические термометры
Основные характеристики термоэлектрических термометров
Технические характеристики милливольтметров
5. Термометры сопротивления и термисторы
Технические характеристики термометров сопротивления
6. Бесконтактное измерение температуры
7. Техника безопасности при контроле температуры
Глава 8. Контроль давления и разрежения
1. Общие сведения и классификация приборов
Технические характеристики показывающих и сигнализирующих манометров
Технические характеристики тягомеров, напоромеров и тягонапоромеров
Технические характеристики промышленных вакуумметров
5. Техника безопасности при контроле давления
Глава 9. Контроль расхода, количества и уровня
1. Общие сведения и классификация приборов
Технические характеристики ротаметров
Технические характеристики шариковых расходомеров
Технические характеристики счетчиков жидкостей и газов
4. Счетчики и весы твердых и сыпучих материалов
5. Уровнемеры жидкостей и сыпучих материалов
Технические характеристики поплавковых уровнемеров с пружинным уравновешиванием
Технические характеристики буйковых уровнемеров
6. Техника безопасности при контроле расхода, количества и уровня
Глава 10. Контроль специальных параметров
2. Контроль влажности и запыленности газа
3. Контроь влажности сыпучих материалов
4. Контроль плотности жидкости
5. Техника безопасности при контроле специальных параметров
Раздел III. Автоматическое управление, контроль и регулирование
Глава 11. Системы автоматики с программным управлением
1. Общие принципы построения систем
2. Интуитивный метод разработки схем управления
3. Аналитический метод разработки схем управления
Глава 12. Автоматическая блокировка и защита в системах управления
1. Системы автоматической блокировки
2. Системы автоматической защиты
Глава 13. Системы автоматического контроля и сигнализации
2. Измерительные системы с цифровым отсчетом
3. Системы централизованного контроля
4. Системы автоматической сигнализации
Глава 14. Системы автоматического регулирования
1. Основные понятия и определения
2. Обыкновенные системы регулирования
3. Самонастраивающиеся системы регулирования
4. Качественные показатели автоматического регулирования
Глава 15. Объекты регулирования и их свойства
2. Параметры объектов регулирования
3. Определение основных свойств объектов
1. Классификация автоматических регуляторов
2. Регуляторы прерывистого (дискретного) действия
3. Регуляторы непрерівного действия
4. Выбор типа регуляторов и параметров его настройки
Формулы для определения параметров настройки регуляторов
Глава 17. Конструкции и характеристики регуляторов
1. Регуляторы прямого действия
2. Электрические регуляторы косвенного действия
3. Гидравлические регуляторы косвенного действия
4. Пневматические регуляторы косвенного действия
5. Техника безопасности при эксплуатации регуляторов
Раздел IV. Микропроцессорные системы
Глава 18. Общая характеристика микропроцессорных систем
1. Основные понятия и определения
2. Организация работы вычислительной машины
Глава 19. Математическое и программное обеспечение микроЭвм
2. Правила перевода одной системы счисления в другую
3. Формы представления чисел в эвм. Машинные коды
Глава 20. Внешние устройства микроЭвм
1. Классификация внешних устройств
2. Внешние запоминающие устройства
3. Устройства для связи эвм – оператор
4. Внешние устройства связи эвм с объектом
Глава 21. Применение микропроцессорных систем
1. Состав систем автоматики с применением микроЭвм
2. Управление производственными процессами
Раздел V. Промышленные роботы и роботизированные системы
Глава 22. Общие сведения о промышленных роботах
1. Основные определения и классификация промышленных роботов
2. Структура промышленных роботов
3. Основные технические показатели роботов
Глава 23. Конструкции промышленных роботов
1. Промышленные роботы агрегатно-модульного типа
Технические данные агрегатной гаммы промышленных роботов лм40ц.00.00 [9]
Технические характеристики и области обслуживания типового ряда промышленных роботов [9]
Технические данные модулей агрегатной гаммы рпм-25 [9]
2. Интерактивные промышленные роботы
3. Адаптивные промышленные роботы
5. Приводы промышленных роботов
Глава 24. Системы управления промышленными роботами
1. Назначение и классификация систем управления
2. Унифицированные системы управления
Технические данные унифицированных систем управления уцм [9]
Технические данные унифицированных систем управления упм [9]
Технические данные контурных систем управления укм [9]
Глава 25. Роботизация промышленного производства
1. Основные типы роботизированных систем
2. Гибкие производственные системы с применением промышленных роботов
3. Техника безопасности при эксплуатации роботов
Приложение Буквенные обозначения элементов электрических схем
3. Составляется первичная математическая модель для каждого исполнительного или промежуточного элемента. Она представляет собой произведение двух элементов циклограммы: включающего (пускового) а и выключающего (остановочного) Ь, взятого со знаком инверсии, т. е.
![]()
где X – исполнительный или промежуточный элемент. На циклограмме исполнительный элемент после включающего элемента стоит со знаком плюс, а после выключающего – со знаком минус. Если включающий контакт находится, в циклограмме со знаком минус, то в модель его записывают со знаком инверсии. Наличие знака минус у выключающего контакта приводит к тому, что в модели знак инверсии отсутствует.
Записываем
первичную математическую модель для
исполнительного элемента К, где
![]() ;
е – включающий элемент, т – выключающий.
;
е – включающий элемент, т – выключающий.
4. Проводят три проверки составленной первичной модели. Цель первой проверки заключается в том, что исследуется природа включающего элемента на длительность включения. Включающий элемент является элементом длительного действия, если он не меняет своего знака во включающем периоде, и наоборот, кратковременного действия, когда меняет свой знак. Если в результате первой проверки будет установлено, что включающий элемент является элементом кратковременного действия, то первичную модель корректируют введением в нее самоблокировки, т. е. блокируют включающий элемент исполнительным или промежуточным элементом. Тогда скорректированная модель будет иметь вид
![]()
где х – блокировочный элемент.
В
примере включающий элемент Е меняет
свой знак во включающем периоде,
следовательно, он является элементом
кратковременного действия. Модель после
корректировки будет иметь вид
![]()
Суть второй проверки сводится к определению длительности действия выключающего элемента. Если выключающий элемент меняет свой знак в периоде включения, то он является элементом кратковременного действия, а если не меняет, то элемент длительного действии. Если в результате второй проверки будет установлена кратковременность действия выключающего элемента, то следует провести корректировку математической модели, полученной по результатам первой проверки. Корректировка осуществляется продлением действия выключающего элемента существующим элементом циклограмм либо вновь введенным. Скорректированная модель будет иметь вид
![]() (а)
(а)
или
![]() (б)
(б)
где n – существующий элемент циклограммы или вновь введенный. Выражение (а) используют, если корректировка модели по результатам первой проверки не проводилась, а выражение (б), если проводилась.
В
примере выключающий элемент не меняет
своего знака во включающем периоде,
следовательно, он является элементом
длительного действия, и модель, полученная
по результатам первой проверки, остается
без изменений, т. е.
![]()
Третья проверка осуществляется для выявления ложных включений исследуемого элемента X во всей циклограмме. Сначала модель, полученная по результатам второй проверки, представляется в виде суммы слагаемых (если это возможно). Затем определяется значение суммарного весового коэффициента Кс для каждого из слагаемых математической модели или для модели в целом (если она не может быть представлена в виде суммы слагаемых). Для этого каждому элементу слагаемого (или модели) присваивается свой весовой коэффициент. Первому элементу присваивается значение весового коэффициента 20, второму – 21, третьему – 22, четвертому – 23 и т. д. Сумма этих коэффициентов равна значению суммарного весового коэффициента Кс. Однако следует помнить, что при суммировании весовые коэффициенты элементов, стоящие в модели со знаком инверсии, в сумму не входят.
В
примере модель
![]() можно представить в виде
слагаемых, т. е.
можно представить в виде
слагаемых, т. е.
![]() Присвоим весовые коэффициенты
элементам каждого слагаемого:
Присвоим весовые коэффициенты
элементам каждого слагаемого:
![]()
Тогда суммарный коэффициент для каждого слагаемого будет равен единице, т. е. Кс = 1, так элемент т имеет знак инверсии.
Теперь необходимо записать ряд весовых коэффициентов циклограммы для каждого слагаемого (или модели в целом). Коэффициенты пишут под каждой буквой циклограммы. Значение первого коэффициента зависит от того, с каким знаком приходят включающие и выключающие элементы к концу циклограммы, т. е. включенными или выключенными. Если они выключены, то в сумму первого коэффициента идет нуль и ряд начинается с нуля, а если включен хотя бы один, то в сумму идет значение коэффициента этого элемента. Получим:
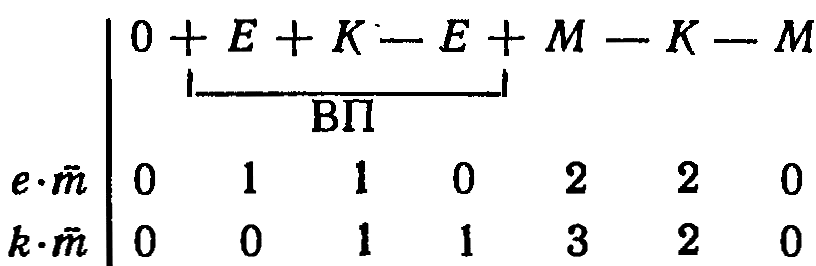
Значение суммарного весового коэффициента Кс должно встречаться только во включающем периоде. Наличие его в других тактах указывает на то, что там существуют ложные включения и математическая модель требует корректировки.
В примере значение суммарного весового коэффициента, равное единице, встречается только во включающем периоде. Следовательно, ложных включений элемента К нет, и модель не требует корректировки.
Корректировку математической модели по результатам третьей проверки проводят «опоясыванием» (блокированием) тактов, в которых встречаются ложные включения, или рабочих тактов. Если «опоясывают» ложные включения каким-либо элементом Р, то математическую модель, полученную по результатам второй проверки, следует умножить на р со знаком инверсии, т. е.
![]()
если «опоясывают» рабочие такты, то модель умножают на р без знака инверсии, т. е.
![]()
В качестве «опоясывающего» элемента может быть использован какой-либо элемент циклограммы, который включается до начала рабочих тактов (или ложных включений) и выключается после окончания рабочих тактов. Сформулированное правило касается и вновь введенных элементов.
Если для корректировки математической модели элемента X вводится новый элемент, то он по своей функции является промежуточным элементом, и для него необходимо проводить математическое моделирование. Поэтому всегда необходимо стремиться к тому, чтобы в первую очередь использовать элемент,
![]()
Рис. 107. Схема управления нереверсивным электродвигателем
уже имеющийся в циклограмме, и только при отсутствии необходимого элемента вводить новый.
5. Составляется обобщенная модель, которая представляет собой сумму математических моделей всех исполнительных и промежуточных элементов, каждая из которых умножена на соответствующий исполнительный или промежуточный элемент.
В примере один исполнительный элемент, поэтому обобщенная математическая модель будет иметь вид
![]()
6. Проводят минимизацию обобщенной модели и по минимизированной модели строят электрическую схему. При этом исходят из того, что знак умножения соответствует последовательному соединению элементов, а знак сложения – параллельному. Все элементы математической модели без знака инверсии эквивалентны замыкающим контактам, а со знаком инверсии – размыкающим.
Схема управления, рассмотренная в примере, приведена на рис. 107.
Контрольные вопросы и задания
1. Расскажите о классификации систем автоматического программного управления.
2. Как осуществляется управление в функции времени?
3. Как осуществляется управление в функции пути?
4. Расскажите о типовых пусковых контактах и дайте их характеристику.
5. Расскажите об интуитивном методе построения схем управления.
6. Расскажите об аналитическом методе схем управления.
7. Расскажите о действиях алгебры логики.
8. Расскажите о законах алгебры логики.
9. Изложите последовательность разработки схем аналитическим методом.
10. В чем заключается суть первой проверки математической модели, и как она проводится?
11. В чем заключается суть второй проверки, и как она проводится?
12. В чем заключается суть третьей проверки, и как она проводится?
Глава 12. Автоматическая блокировка и защита в системах управления
1. Системы автоматической блокировки
Под блокировкой подразумевается взаимосвязь элементов схемы управления, которая обеспечивает либо требования последовательного включения рабочих органов механизмов, либо безопасность обслуживающего персонала.
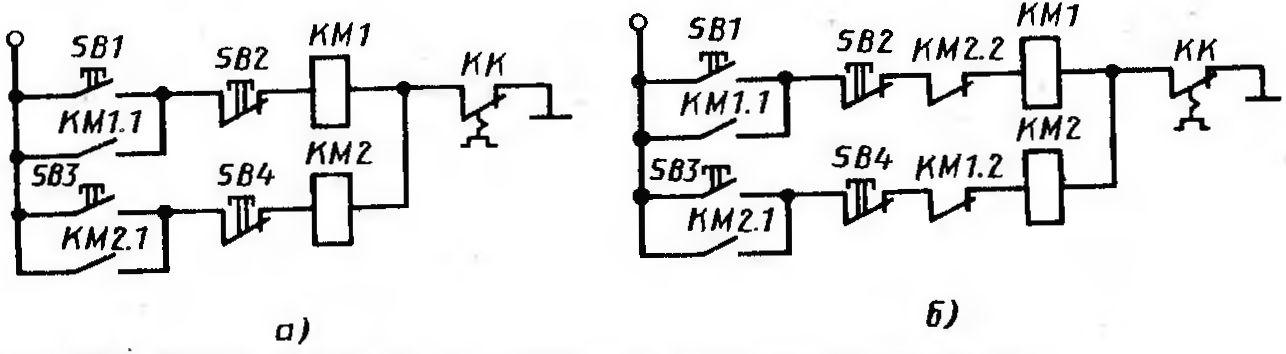
Рис. 108. Схемы управления реверсивным электродвигателем:
а – без исключающей блокировки; б – исключающей блокировкой
По функциональному признаку, т. е. по назначению, различают три вида блокировки: исключающую, разрешающую и блокировку памяти.
Исключающая
блокировка – это такой вид блокировки,
при которой включение одного элемента
схемы исключает возможность включения
другого, сблокированного элемента
схемы. Исключающая блокировка
осуществляется с помощью логического
элемента НЕ. Например,
![]() ,
т.е. если на вход какого-либо устройства
подается сигнал а, то сигнал X отсутствует.
,
т.е. если на вход какого-либо устройства
подается сигнал а, то сигнал X отсутствует.
Исключающая блокировка находит широкое применение в схемах управления. На рис. 108 показаны две схемы управления реверсивным электродвигателем с помощью пусковых и стоповых кнопок. Первая схема (рис. 108, а) не содержит исключающей блокировки, а во второй схеме (рис. 108, б) она предусмотрена. При управлении электродвигателем с помощью первой схемы возможна аварийная ситуация. Если после пуска двигателя кнопкой SB1 нажать на пусковую кнопку SB3 или наоборот, то это приведет к срабатыванию магнитного пускателя КМ2 и, как следствие этого, к короткому замыканию в силовой цепи. Этого недостатка лишена вторая схема, так как в ней предусматривается исключающая блокировка. При нажатии на пусковую кнопку SB1 (рис. 108, б) возбуждается катушка магнитного пускателя КМ1 и, следовательно, размыкается блокировочный контакт КМ1.2. Если теперь нажать на пусковую кнопку SB3, короткое замыкание в силовой цепи не произойдет, так как катушка магнитного пускателя КМ2 не возбудится. Цепь будет разорвана контактом КM1.2.
Исключающая блокировка обязательно применяется для защиты генератора высокой частоты, если от него питаются несколько индукторов, суммарная мощность которых больше установочной мощности генератора, а также в ряде других схем.

