ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 20.07.2024
Просмотров: 710
Скачиваний: 0

СОДЕРЖАНИЕ
А.Г. Староверов основы автоматизации производства
Глава 1. Общие сведения о системах автоматики и составляющих ее элементах
1. Основные понятия и определения
2. Классификация систем автоматического управления
3. Элементы автоматических систем
Глава 2. Первичные преобразователи
1. Общие сведения и классификация первичных преобразователей
2. Потенциометрические первичные преобразователи
3. Индуктивные первичные преобразователи
4. Емкостные первичные преобразователи
5. Тензометрические первичные преобразователи
6. Фотоэлектрические первичные преобразователи
Глава 3. Усилители и стабилизаторы
2. Электромеханические и магнитные усилители
Глава 4. Переключающие устройства и распределители
3. Контактные аппараты управления
4. Бесконтактные устройства управления
Наименование н обозначение логических функций н элементов
Глава 5. Задающие и исполнительные устройства
1. Классификация задающих и исполнительных устройств
3. Электрические исполнительные механизмы
Раздел II. Контрольно-измерительные приборы и техника измерения параметров технологических процессов
Глава 6. Общие сведения об измерении и контроле
1. Основные метрологические понятия техники измерения и контроля
3. Методы измерения и классификация. Контрольно-измерительных приборов
1. Температурные шкалы. Классификация технических приборов и устройств измерения температуры
Технические характеристики стеклинных ртутных, термометров типа тт
Технические характеристики дилатометрических гермометров
Характеристики манометрических термометров
4. Термоэлектрические термометры
Основные характеристики термоэлектрических термометров
Технические характеристики милливольтметров
5. Термометры сопротивления и термисторы
Технические характеристики термометров сопротивления
6. Бесконтактное измерение температуры
7. Техника безопасности при контроле температуры
Глава 8. Контроль давления и разрежения
1. Общие сведения и классификация приборов
Технические характеристики показывающих и сигнализирующих манометров
Технические характеристики тягомеров, напоромеров и тягонапоромеров
Технические характеристики промышленных вакуумметров
5. Техника безопасности при контроле давления
Глава 9. Контроль расхода, количества и уровня
1. Общие сведения и классификация приборов
Технические характеристики ротаметров
Технические характеристики шариковых расходомеров
Технические характеристики счетчиков жидкостей и газов
4. Счетчики и весы твердых и сыпучих материалов
5. Уровнемеры жидкостей и сыпучих материалов
Технические характеристики поплавковых уровнемеров с пружинным уравновешиванием
Технические характеристики буйковых уровнемеров
6. Техника безопасности при контроле расхода, количества и уровня
Глава 10. Контроль специальных параметров
2. Контроль влажности и запыленности газа
3. Контроь влажности сыпучих материалов
4. Контроль плотности жидкости
5. Техника безопасности при контроле специальных параметров
Раздел III. Автоматическое управление, контроль и регулирование
Глава 11. Системы автоматики с программным управлением
1. Общие принципы построения систем
2. Интуитивный метод разработки схем управления
3. Аналитический метод разработки схем управления
Глава 12. Автоматическая блокировка и защита в системах управления
1. Системы автоматической блокировки
2. Системы автоматической защиты
Глава 13. Системы автоматического контроля и сигнализации
2. Измерительные системы с цифровым отсчетом
3. Системы централизованного контроля
4. Системы автоматической сигнализации
Глава 14. Системы автоматического регулирования
1. Основные понятия и определения
2. Обыкновенные системы регулирования
3. Самонастраивающиеся системы регулирования
4. Качественные показатели автоматического регулирования
Глава 15. Объекты регулирования и их свойства
2. Параметры объектов регулирования
3. Определение основных свойств объектов
1. Классификация автоматических регуляторов
2. Регуляторы прерывистого (дискретного) действия
3. Регуляторы непрерівного действия
4. Выбор типа регуляторов и параметров его настройки
Формулы для определения параметров настройки регуляторов
Глава 17. Конструкции и характеристики регуляторов
1. Регуляторы прямого действия
2. Электрические регуляторы косвенного действия
3. Гидравлические регуляторы косвенного действия
4. Пневматические регуляторы косвенного действия
5. Техника безопасности при эксплуатации регуляторов
Раздел IV. Микропроцессорные системы
Глава 18. Общая характеристика микропроцессорных систем
1. Основные понятия и определения
2. Организация работы вычислительной машины
Глава 19. Математическое и программное обеспечение микроЭвм
2. Правила перевода одной системы счисления в другую
3. Формы представления чисел в эвм. Машинные коды
Глава 20. Внешние устройства микроЭвм
1. Классификация внешних устройств
2. Внешние запоминающие устройства
3. Устройства для связи эвм – оператор
4. Внешние устройства связи эвм с объектом
Глава 21. Применение микропроцессорных систем
1. Состав систем автоматики с применением микроЭвм
2. Управление производственными процессами
Раздел V. Промышленные роботы и роботизированные системы
Глава 22. Общие сведения о промышленных роботах
1. Основные определения и классификация промышленных роботов
2. Структура промышленных роботов
3. Основные технические показатели роботов
Глава 23. Конструкции промышленных роботов
1. Промышленные роботы агрегатно-модульного типа
Технические данные агрегатной гаммы промышленных роботов лм40ц.00.00 [9]
Технические характеристики и области обслуживания типового ряда промышленных роботов [9]
Технические данные модулей агрегатной гаммы рпм-25 [9]
2. Интерактивные промышленные роботы
3. Адаптивные промышленные роботы
5. Приводы промышленных роботов
Глава 24. Системы управления промышленными роботами
1. Назначение и классификация систем управления
2. Унифицированные системы управления
Технические данные унифицированных систем управления уцм [9]
Технические данные унифицированных систем управления упм [9]
Технические данные контурных систем управления укм [9]
Глава 25. Роботизация промышленного производства
1. Основные типы роботизированных систем
2. Гибкие производственные системы с применением промышленных роботов
3. Техника безопасности при эксплуатации роботов
Приложение Буквенные обозначения элементов электрических схем
Печатающее устройство регистрирует значения всех или определенным образом выбранных контролируемых параметров. При регистрации всех параметров машина как бы опрашивает все каналы контроля, поэтому такая печать называется опросной. Опросная печать может запускаться либо автоматически в заранее выбранные и введенные в блок управления 3 моменты времени (периодическая регистрация), либо по произвольному выбору оператора с помощью блока выбора 10. Кроме того, этот блок позволяет вызвать данный параметр на показывающий и записывающий приборы. Визуальное наблюдение за параметрами осуществляется также с помощью цифрового показывающего прибора 7, на который оператор может вызвать значение любого контролируемого параметра из аналого-цифрового преобразователя либо из вычислительного устройства.
Информация, подлежащая обработке, поступает в вычислительное устройство, которое хранит результаты обработки в своей оперативной памяти и может выдавать их по требованию на печатающее устройство или цифровой показывающий прибор.
Промышленность выпускает различные виды устройств централизованного автоматического контроля. К их числу относятся ЭЛРУ-2, МАР-1, ЗЕНИТ-1 и др.
ЭЛРУ-2 (электронное логическое регистрирующее устройство) предназначено для автоматического централизованного измерения и цифровой регистрации на специальных бланках в виде таблиц параметров технологических процессов, а также для сигнализации при выходе этих параметров за пределы заданных значений. ЭЛРУ-2 может быть использовано для измерения и регистрации температуры, состава газовой фазы, давления, расхода и т. п. К устройству ЭЛРУ-2 может быть подключено 56 преобразователей.
МАР-1 служит для централизованного автоматического измерения и сигнализации 240 параметров и цифровой регистрации 200 параметров технологических процессов.
ЗЕНИТ-1 предназначен для измерения цифровой регистрации, сигнализации и позиционного регулирования 40 параметров технологических процессов.
МАРС-200-Р обеспечивает контроль по 200 параметрам технологических процессов и регулирование по 144 параметрам. Наиболее успешно машина работает при контроле температуры, реагируя на отклонение температуры до ±1°С.
Дальнейшим развитием централизованного контроля являются машины, содержащие блоки математической обработки полученной информации и выдачи результатов в соответствии с законом управления. Такие машины называют управляющими вычислительными машинами (УВМ).
4. Системы автоматической сигнализации
Предупредительная сигнализация извещает обслуживающий персонал о различных режимах работы оборудования или о непредвиденном его выключении, вызванном неисправностью или внешними причинами. Получаемая обслуживающим персоналом информация может быть как звуковой, так и световой.
Для подачи звуковых сигналов используются сирены, звонки, гудки, зуммеры и магнитофоны с предварительно записанными сообщениями. Громкость и частота звукового сигнала должны обеспечивать его хорошую слышимость на фоне производственных шумов (уровень сигнала должен быть выше на 10 дБ общего шума). Повышенной надежностью обладают модулированные (по высоте) и прерывающиеся во времени звуки.
В качестве визуальных сигнализаторов используются световые приборы: фонари, прожекторы, табло, транспаранты с надписью, указывающие характер событий, электромеханические реле с сигнальными флажками.
Отдельные сигнализаторы могут объединяться в комплекс (на пультах управления), дающий изображение текущего состояния контролируемого объекта.
Конструкция и параметры светосигнальных устройств должны обеспечивать надежное фиксирование сигнала глазом человека. Для этого необходимо создавать такую освещенность, при которой начинает восприниматься цвет сигнала. Сигнальные цвета должны быть контрастными по отношению друг к другу и окружающему фону.
В аварийной световой сигнализации предпочтение отдается красному цвету, который лучше всего виден сквозь пыль и дым. Хорошо воспринимается мигающий свет с частотой мигания не более 10 Гц и продолжительностью не менее 0,05 с.
Для надежного обнаружения светового сигнала сигнализаторы должны располагаться в пределах 30° от нормальной оси зрения оператора.
В качестве источников света в сигнализаторах используют лампы накаливания, лампы тлеющего разряда и электролюминесцентные приборы.
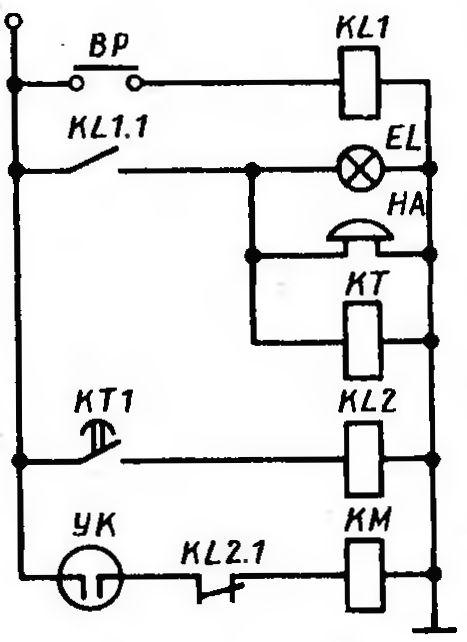
Рис. 118. Схема предупредительной сигнализации рольганговой печи
Характерным примером предупредительной сигнализации в термических цехах является устройство, применяемое на селитровых ваннах. Перегрев селитры выше определенной температуры недопустим, так как может вызвать взрыв. Для предупреждения перегрева предусматривается световая и звуковая сигнализации. Сигнальная лампа и звуковой сигнал включаются по достижении максимально допустимой температуры.
В литейных цехах при транспортировании и разливке жидкого металла обязательно предусматривается звуковая сигнализация.
Упрощенная схема предупредительной сигнализации рольганговой печи с водоохлаждаемыми роликами показана на рис. 118. Если по каким-либо причинам вода недостаточно охлаждает ролики (или совсем прекратилась подача воды), приводится в действие световая и звуковая сигнализации. При недостатке воды в охлаждающей системе реле ВР замыкают контакты и включает промежуточное реле KL1, контакт которого включает сигнальную лампу EL и звуковой сигнал НА. Одновременно возбуждается реле КТ, которое своим контактом КТ1 через определенный интервал времени включает промежуточное реле KL2. Контакт KL2.1 этого реле размыкается, и цепь управления магнитным пускателем КМ с управляющим контактом УК разрывается.
Аналогичные схемы применяют и для контроля смазки подшипников ответственных механизмов.
Контрольные вопросы и задания
1. Расскажите о значении систем автоматического контроля и их видах.
2. Какай система носит название системы контроля с цифровым отсчетом?
3. Что такое квантование?
4. Расскажите о видах цифровых индикаторов.
5. Какое назначение имеет система централизованного контроля?
6. Расскажите о назначении и характеристике систем централизованного контроля, выпускаемых промышленностью.
7. Расскажите о видах систем автоматической сигнализации.
8. Расскажите о средствах технологической сигнализации.
Глава 14. Системы автоматического регулирования
1. Основные понятия и определения
Управление, сопровождающееся непрерывным контролем, называют регулированием, а параметр, которым необходимо управлять, т. е. регулировать, – регулируемой величиной. Например, если уровень жидкости в закалочном баке снижается, то необходимо увеличивать подачу воды в бак до тех пор, пока уровень не достигнет заданного значения. В данном примере уровень жидкости является регулируемой величиной, а закалочный бак, в котором регулируется уровень, – объектом регулирования. Следовательно, операция поддержания равенства регулируемой величины ее заданному значению является регулированием. Регулирование может осуществляться вручную и автоматически.
Рассмотрим принцип работы лабораторной нагревательной печи, подключенной к электросети через автотрансформатор. Пусть для измерения температуры в печи установлен термоэлектрический преобразователь (термопара), подключённый к милливольтметру. Лаборант, наблюдая за показаниями милливольтметра, регулирует напряжение на нагревательных элементах печи. Если температура в печи оказывается ниже заданной, он увеличивает напряжение на нагревательных элементах, отчего температура повышается; и наоборот, если температура повышается, то лаборант уменьшает напряжение на нагревательных элементах. Таким образом, лаборант, изменяя напряжение на нагревательных элементах, регулирует температуру. Такое регулирование называют ручным регулированием.
Для автоматизации процесса регулирования необходимо, чтобы какое-либо устройство непрерывно или периодически измеряло значение регулируемой величины, сравнивало с заданным значением и в случае несоответствия с помощью регулирующего органа корректировало технологический процесс, поддерживая заданное значение регулируемой величины. Такое регулирование, при котором управление осуществляется различными устройствами без вмешательства человека, называют автоматическим регулированием, а совокупность устройств, состоящих из измерительного элемента (первичного преобразователя), исполнительного механизма и регулирующего органа, называют автоматическим регулятором.
Система автоматического регулирования (рис. 119) представляет собой совокупность отдельных элементов, направленно воздействующих друг на друга. В сравнивающем устройстве происходит сравнение текущего значения регулируемой величины X, которое поступает по главной обратной связи, с ее заданным значением Х0.

