ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 20.07.2024
Просмотров: 739
Скачиваний: 0

СОДЕРЖАНИЕ
А.Г. Староверов основы автоматизации производства
Глава 1. Общие сведения о системах автоматики и составляющих ее элементах
1. Основные понятия и определения
2. Классификация систем автоматического управления
3. Элементы автоматических систем
Глава 2. Первичные преобразователи
1. Общие сведения и классификация первичных преобразователей
2. Потенциометрические первичные преобразователи
3. Индуктивные первичные преобразователи
4. Емкостные первичные преобразователи
5. Тензометрические первичные преобразователи
6. Фотоэлектрические первичные преобразователи
Глава 3. Усилители и стабилизаторы
2. Электромеханические и магнитные усилители
Глава 4. Переключающие устройства и распределители
3. Контактные аппараты управления
4. Бесконтактные устройства управления
Наименование н обозначение логических функций н элементов
Глава 5. Задающие и исполнительные устройства
1. Классификация задающих и исполнительных устройств
3. Электрические исполнительные механизмы
Раздел II. Контрольно-измерительные приборы и техника измерения параметров технологических процессов
Глава 6. Общие сведения об измерении и контроле
1. Основные метрологические понятия техники измерения и контроля
3. Методы измерения и классификация. Контрольно-измерительных приборов
1. Температурные шкалы. Классификация технических приборов и устройств измерения температуры
Технические характеристики стеклинных ртутных, термометров типа тт
Технические характеристики дилатометрических гермометров
Характеристики манометрических термометров
4. Термоэлектрические термометры
Основные характеристики термоэлектрических термометров
Технические характеристики милливольтметров
5. Термометры сопротивления и термисторы
Технические характеристики термометров сопротивления
6. Бесконтактное измерение температуры
7. Техника безопасности при контроле температуры
Глава 8. Контроль давления и разрежения
1. Общие сведения и классификация приборов
Технические характеристики показывающих и сигнализирующих манометров
Технические характеристики тягомеров, напоромеров и тягонапоромеров
Технические характеристики промышленных вакуумметров
5. Техника безопасности при контроле давления
Глава 9. Контроль расхода, количества и уровня
1. Общие сведения и классификация приборов
Технические характеристики ротаметров
Технические характеристики шариковых расходомеров
Технические характеристики счетчиков жидкостей и газов
4. Счетчики и весы твердых и сыпучих материалов
5. Уровнемеры жидкостей и сыпучих материалов
Технические характеристики поплавковых уровнемеров с пружинным уравновешиванием
Технические характеристики буйковых уровнемеров
6. Техника безопасности при контроле расхода, количества и уровня
Глава 10. Контроль специальных параметров
2. Контроль влажности и запыленности газа
3. Контроь влажности сыпучих материалов
4. Контроль плотности жидкости
5. Техника безопасности при контроле специальных параметров
Раздел III. Автоматическое управление, контроль и регулирование
Глава 11. Системы автоматики с программным управлением
1. Общие принципы построения систем
2. Интуитивный метод разработки схем управления
3. Аналитический метод разработки схем управления
Глава 12. Автоматическая блокировка и защита в системах управления
1. Системы автоматической блокировки
2. Системы автоматической защиты
Глава 13. Системы автоматического контроля и сигнализации
2. Измерительные системы с цифровым отсчетом
3. Системы централизованного контроля
4. Системы автоматической сигнализации
Глава 14. Системы автоматического регулирования
1. Основные понятия и определения
2. Обыкновенные системы регулирования
3. Самонастраивающиеся системы регулирования
4. Качественные показатели автоматического регулирования
Глава 15. Объекты регулирования и их свойства
2. Параметры объектов регулирования
3. Определение основных свойств объектов
1. Классификация автоматических регуляторов
2. Регуляторы прерывистого (дискретного) действия
3. Регуляторы непрерівного действия
4. Выбор типа регуляторов и параметров его настройки
Формулы для определения параметров настройки регуляторов
Глава 17. Конструкции и характеристики регуляторов
1. Регуляторы прямого действия
2. Электрические регуляторы косвенного действия
3. Гидравлические регуляторы косвенного действия
4. Пневматические регуляторы косвенного действия
5. Техника безопасности при эксплуатации регуляторов
Раздел IV. Микропроцессорные системы
Глава 18. Общая характеристика микропроцессорных систем
1. Основные понятия и определения
2. Организация работы вычислительной машины
Глава 19. Математическое и программное обеспечение микроЭвм
2. Правила перевода одной системы счисления в другую
3. Формы представления чисел в эвм. Машинные коды
Глава 20. Внешние устройства микроЭвм
1. Классификация внешних устройств
2. Внешние запоминающие устройства
3. Устройства для связи эвм – оператор
4. Внешние устройства связи эвм с объектом
Глава 21. Применение микропроцессорных систем
1. Состав систем автоматики с применением микроЭвм
2. Управление производственными процессами
Раздел V. Промышленные роботы и роботизированные системы
Глава 22. Общие сведения о промышленных роботах
1. Основные определения и классификация промышленных роботов
2. Структура промышленных роботов
3. Основные технические показатели роботов
Глава 23. Конструкции промышленных роботов
1. Промышленные роботы агрегатно-модульного типа
Технические данные агрегатной гаммы промышленных роботов лм40ц.00.00 [9]
Технические характеристики и области обслуживания типового ряда промышленных роботов [9]
Технические данные модулей агрегатной гаммы рпм-25 [9]
2. Интерактивные промышленные роботы
3. Адаптивные промышленные роботы
5. Приводы промышленных роботов
Глава 24. Системы управления промышленными роботами
1. Назначение и классификация систем управления
2. Унифицированные системы управления
Технические данные унифицированных систем управления уцм [9]
Технические данные унифицированных систем управления упм [9]
Технические данные контурных систем управления укм [9]
Глава 25. Роботизация промышленного производства
1. Основные типы роботизированных систем
2. Гибкие производственные системы с применением промышленных роботов
3. Техника безопасности при эксплуатации роботов
Приложение Буквенные обозначения элементов электрических схем
Катушка КА1 включается только тогда, когда температура в печи достигает минимального значения. Катушка К.А2 подсоединена к контакту, соответствующему нормальной температуре в печи. Следовательно, нагревательные элементы печи остаются включенными и в том случае, когда температура печи станет равной заданной. Нагреватели отключаются от сети только тогда, когда температура в печи станет больше нормы. Так составлены цепи, управляющие стабилизацией температуры в печи. О том, включена печь или выключена в данный момент, нас информируют две сигнальные лампы: L1 и L2. При включенных нагревательных элементах горит сигнальная лампа L1, а при выключенных – лампа L2. Это достигается включением в цепи 5 и 6 контактов контактора КМ. Резисторы R в цепях 5 и 6 необходимы для понижения напряжения на сигнальных лампах с 220 В до рабочего (резисторы в цепях ламп играют роль нагрузочных сопротивлении). Цепи 7, 8 и 11 предназначены для управления подачей защитной атмосферы и газовой завесы.
В схеме имеются электромагнитные краны Ml и М2 соответственно подачи защитной атмосферы и подачи газа для создания газовой завесы в печи.
Как видно из структуры цепи 7, подать в печь защитную атмосферу можно только в том случае, если температура в печи не снизилась до минимальной (при включении КА1 цепь 7 размыкается контактом КА1.2). Эта система является системой защиты от взрыва. Управление подачей газа в печь осуществляется вручную с помощью кнопок SB1 и SB2. Реле КАЗ введено для размножения контактов, так как M1 не имеет блокировочных контактов.
При включении M1 (а также КА3) одновременно загорается сигнальная лампа L3, оповещающая обслуживающий персонал о том, что газовый кран открыт. Выключение газа (с помощью кнопки SB1) сопровождается выключением и L3; при этом загорается другая сигнальная лампа – L4, которая информирует о том, что кран закрыт.
Цепи 12 и 13 информационные. С помощью пакетного переключателя SA2 можно включить сирену ВА, оповещающую обслуживающий персонал о снижении температуры в печи до минимального значения, что является признаком какой-то неполадки (нагреватели должны были включиться еще при нормальной температуре). Таким образом, минимальный контакт mm ПСР используется в этой схеме не только как датчик для стабилизации температуры в рабочем пространстве печи, но и как датчик в системе автоматического оповещения и защиты. Система автоматического оповещения может быть выключена переводом переключателя во второе положение (цепь 13). Лампа L5 сигнализирует о том, что систеша автоматического оповещения отключена.
В трехпозиционном регуляторе регулирующий орган имеет третье положение, в котором при значении регулируемой величины, равном заданному, в объект подается такое количество энергии и вещества, которое требуется для нормальной его работы. Схема трех позиционного регулирования может быть получена путем некоторого преобразования рассмотренной схемы двухпозиционного регулирования (см. рис. 136), если с помощью контактов SQ1 и SQ2 управлять тремя промежуточными реле. При замыкании контакта SQ1 включается реле К1, при замыкании SQ2 срабатывает реле К2. Если оба контакта SQ1 и SQ2 разомкнуты, то срабатывает реле КЗ. С помощью этих трех реле нагревательные элементы можно включить треугольником, звездой или выключать их, т. е. осуществлять трехпозиционное регулирование температуры.
Для создания систем автоматического регулирования, реализующих пропорциональный закон регулирования, часто используют балансное реле типа БР-3. В этом реле применяются два реохорда. Значение регулируемой величины определяет положение движка одного реохорда (датчик), а степень открытия регулирующего органа – положение движка реохорда исполнительного механизма (обратная связь).
Задача балансного реле – оказание такого воздействия на исполнительный механизм, при котором положения движков двух реохордов были бы симметричными.
В схеме балансного реле БР-3 (рис. 138) главными элементами являются поляризованное реле РП-5 и выходные реле ВР1 и ВР2. Пока положения движков симметричны, силы тока, протекающего в двух обмотках поляризованного реле, равны и, следовательно, контакты его разомкнуты. Выходные реле ВР1 и ВР2 обесточены, и их исполнительные контакты разомкнуты. При отклонении регулируемой величины (например, при увеличении) изменяется положение движка реохорда датчика. В результате симметричность моста и равновесие сил тока, протекающего через обмотки поляризованного реле нарушаются, и соответствующий контакт замыкается. При этом срабатывает выходное реле, контакты которого включают исполнительный механизм, перемещающий регулирующий орган в сторону уменьшения регулируемой величины. Одновременно перемещается движок реохорда обратной связи. Исполнительный механизм работает до тех пор, пока движок реохорда обратной связи не займет положение движка реохорда датчика, после чего опять наступает равновесие. Контакты реле размыкаются, а исполнительный механизм останавливается. Так обеспечивается постоянная связь между значением регулируемой величины и положением регулирующего органа.
Для создания систем автоматического регулирования, реализующие И-, ПИ- и другие законы, применяют различные электронные регуляторы, к числу которых относятся регуляторы типов ИРМ-240, ВРТ-2, ЭПП-17 и т. д.
Электронные регуляторы типа ИРМ-240 предназначены для пропорционально-интегрального регулирования с любыми измерительными приборами, оснащенными реостатными задатчиками с зоной пропорциональности 10 или 20%. Они работают совместно с исполнительными механизмами с постоянной частотой вращения.
В качестве примера рассмотрим схемы регулирования (рис. 139) температуры в рабочем пространстве топливной печи. Эта схема работает следующим образом. Помещенный в рабочем пространстве печи термоэлектрический термометр 6 вырабатывает сигнал, пропорциональный температуре. Этот сигнал поступает на вход автоматического потенциометра 5, откуда он передается на изодромный регулятор 3. Одновременно на ход регулятора подается сигнал от задатчика 4. От изодромного регулятора сигнал поступает в усилитель 18, где он усиливается по мощности и напряжению до значения, необходимого для изменения положения заслонки 7, расположенной на газопроводе. Регулятор непрерывно изменяет подачу топлива таким образом, чтобы температура в печи оставалась постоянной. Универсальный переключатель 1 имеет два положения: автоматическое и ручное. При ручном управлении используются кнопки 2.
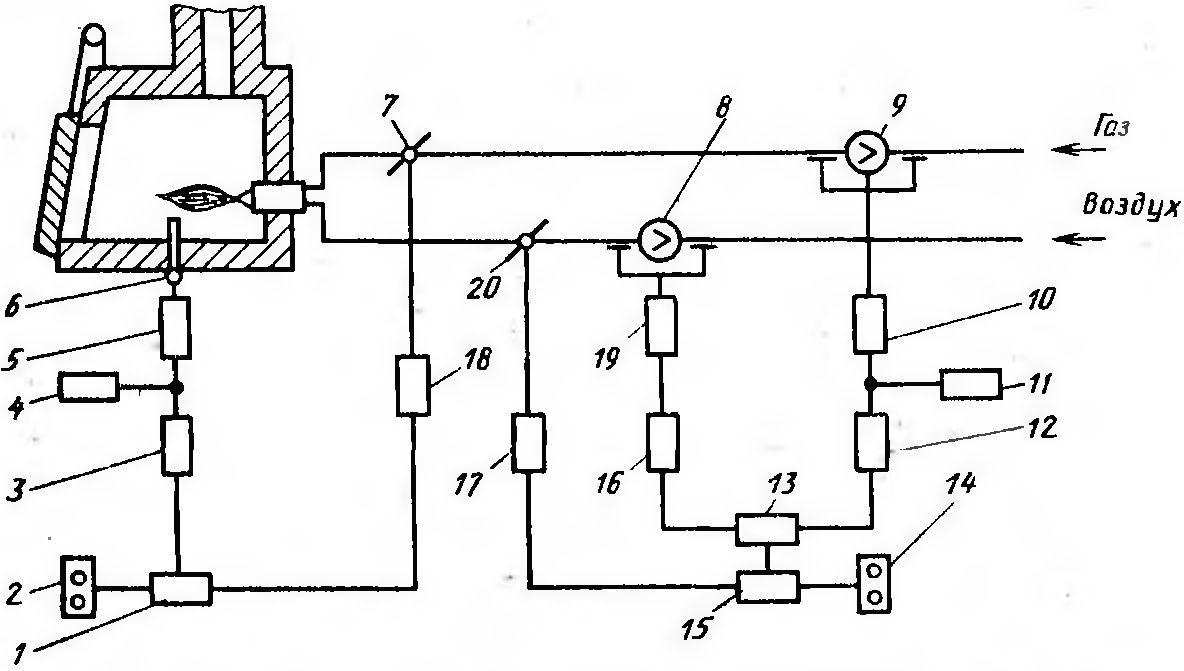
Рис. 139. Схема регулирования температуры и соотношения газа и воздуха топливной печи
Так как при регулировании температуры изменяется расход газа, то для экономического сжигания топлива приходится изменять и расход воздуха, т. е. поддерживать заданное соотношение расхода газа и воздуха.
Вследствие изменения положения заслонки 7 в газопроводе изменяется перепад давления газа на диафрагме 9, что фиксируется чувствительными элементами дифманометра 10. В дифманометре перепад давления преобразуется в электрический сигнал, который подается в усилитель 12 и на измерительный прибор 11, оснащенный интегрирующей (суммирующей) приставкой для подсчета израсходоаанного количества газа. С выхода усилителя сигнал поступает на вход регулятора 13 соотношения газа и воздуха, который через усилитель 17 управляет положением заслонки 20, установленной на воздухопроводе. При изменении расхода воздуха изменяется также перепад давления на диафрагме 8, что фиксируется дифманометром 19. Выходной сигнал дифманометра усиливается усилителем 16 и подается на вход регулятора соотношения газа и воздуха.
Для переключения режимов управления (автоматический или ручной) служит универсальный переключатель 15. При ручном режиме управление осуществляют с помощью кнопок 14.
Изодромные электрические регуляторы используются также в термических цехах в автоматических системах стабилизации атмосферы электрических печей.
Рассмотрим упрощенную структурную схему автоматического регулирования. углеродного потенциала (цементизации) по точке росы (рис. 140, а). Течка росы – это температура, до которой необходимо охладить влажный газ, чтобы пары воды начали конденсироваться, т. е. точка росы является мерой влажности газа.
В схеме используется первичный преобразователь для косвенного регулирования углеродного потенциала, описание которого приведено в гл. 10. Стабилизация состава атмосферы печи осуществляется изменением расхода корректирующего газа.
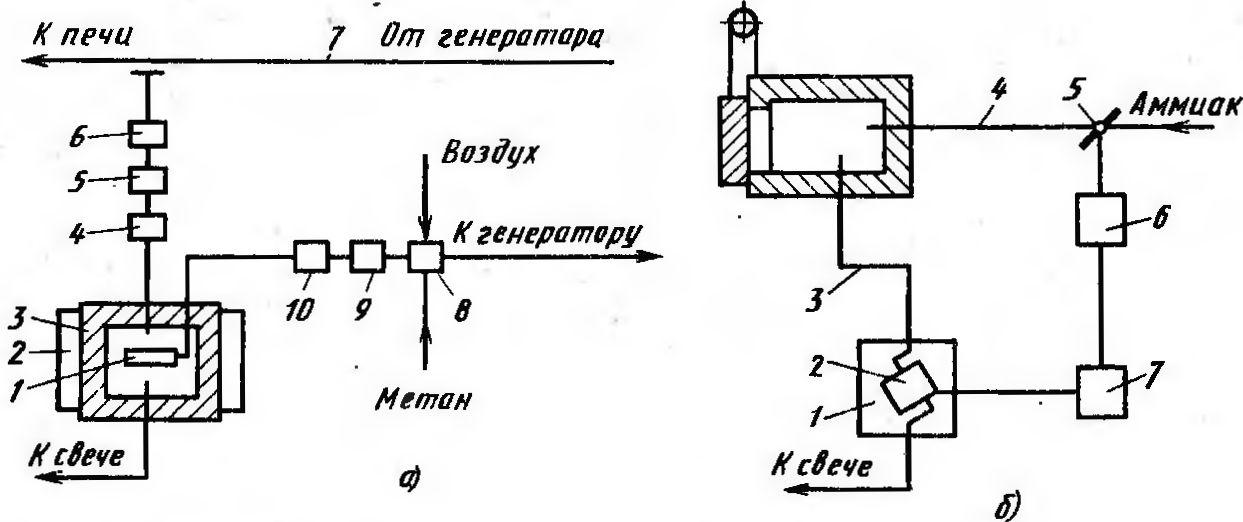
Рис. 140. Структурные схемы регулировки атмосферы печи:
а – при цементации; б – при азотировании
Газ от генератора поступает к печи по трубопроводу 7. На его пути часть газа отбирается и с помощью насоса 6 через фильтр 5 и регулятор расхода 4 подается в специальную камеру 3, где расположен первичный преобразователь 1. Камера снабжена фреоновым холодильником 2 и трубкой для отвода отработанной пробы в свечу. Преобразователь 1 соединен с электрическим изодромным регулятором 10. При отклонении точки росы от заданного значения он подает команду на электрический исполнительный механизм 9, который с помощью регулирующего органа 8 изменяет соотношение газ-воздух, поступающий к генератору.
При газовом азотировании (рис. 140, б) аммиак по трубе 4 поступает в герметически закрытый муфель печи. Печь снабжена отводной трубкой 5,по которой атмосфера печи непрерывно подается в специальную камеру /, где расположен термокондуктометрический газоанализатор 2, настроенный на определенные содержания водорода в газовой смеси. Описание этого прибора приведено в гл. 10. Газоанализатор 2 соединен с электрическим изодромным регулятором 7, который при отклонении содержания водорода от заданного значения подает команду на электрический исполнительный механизм 6 с помощью регулирующего органа 5 изменяет расход аммиака.
В настоящее время широко используется система автоматического регулирования «Каскад». Эта система предназначена для применения в системах автоматического регулирования различных технологических процессов. Система составляет центральную часть электрической аналоговой ветви Государственной системы приборов (ГСП) и рассчитана на работу с отечественными измерительными приборами с дифференцированным выходным сигналом постоянного тока 0 ... 5 мА и 0 ... 20мА и электрическими однооборотными исполнительными механизмами. Особенностями системы является блочно-модульное исполнение, использование современных высоконадежных элементов, малые габаритные размеры и расширенные функциональные возможности.
Для высокоточного регулирования температуры серийно выпускается регулятор ВРТ-2 с диапазоном регулирования ±0,5°С. В качестве измерительных элементов в этом регуляторе используются термоэлектрические термометры типов ПР и ПП. Регулятор состоит из измерительного блока и регулирующего прибора типа Р-111.
Программные и следящие регуляторы создаются путем сочленения стабилизирующего регулятора с программным или следящим задающим устройством.
Наиболее распространенная конструкция программных регуляторов приборного типа (например, ЭПП-17) предусматривает кинематическую связь положения задатчика с радиусом кулачка, вращаемого синхронным двигателем привода диаграммы.
Характерным представителем современных электронных программных регуляторов аппаратного типа является регулирующее устройство типа РУ5, у которого носителем программы является диаграммная лента с нанесенной на ней кривой.
Программные устройства РУ5 выпускаются в двух модификациях: для позиционного регулирования (РУ5-01М) и для П- и ПИ-регулирования (РУК-02М), предназначенные для работы в комплекте с регуляторами, например, РУ4-06, РУ4-15, РУ4-16А.
Программные регуляторы РУ5-01М и РУ4-02М комплектуются электронными измерительными приборами, имеющими дополнительный реостатный датчик со 100%-ной зоной пропорциональности.
Погрешность программных устройств РУ5-01М и РУ5-02М не более 0,5 % от длины шкалы; порог чувствительности следящей системы составляет 0,2 % от длины шкалы.

