ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 20.07.2024
Просмотров: 692
Скачиваний: 0

СОДЕРЖАНИЕ
А.Г. Староверов основы автоматизации производства
Глава 1. Общие сведения о системах автоматики и составляющих ее элементах
1. Основные понятия и определения
2. Классификация систем автоматического управления
3. Элементы автоматических систем
Глава 2. Первичные преобразователи
1. Общие сведения и классификация первичных преобразователей
2. Потенциометрические первичные преобразователи
3. Индуктивные первичные преобразователи
4. Емкостные первичные преобразователи
5. Тензометрические первичные преобразователи
6. Фотоэлектрические первичные преобразователи
Глава 3. Усилители и стабилизаторы
2. Электромеханические и магнитные усилители
Глава 4. Переключающие устройства и распределители
3. Контактные аппараты управления
4. Бесконтактные устройства управления
Наименование н обозначение логических функций н элементов
Глава 5. Задающие и исполнительные устройства
1. Классификация задающих и исполнительных устройств
3. Электрические исполнительные механизмы
Раздел II. Контрольно-измерительные приборы и техника измерения параметров технологических процессов
Глава 6. Общие сведения об измерении и контроле
1. Основные метрологические понятия техники измерения и контроля
3. Методы измерения и классификация. Контрольно-измерительных приборов
1. Температурные шкалы. Классификация технических приборов и устройств измерения температуры
Технические характеристики стеклинных ртутных, термометров типа тт
Технические характеристики дилатометрических гермометров
Характеристики манометрических термометров
4. Термоэлектрические термометры
Основные характеристики термоэлектрических термометров
Технические характеристики милливольтметров
5. Термометры сопротивления и термисторы
Технические характеристики термометров сопротивления
6. Бесконтактное измерение температуры
7. Техника безопасности при контроле температуры
Глава 8. Контроль давления и разрежения
1. Общие сведения и классификация приборов
Технические характеристики показывающих и сигнализирующих манометров
Технические характеристики тягомеров, напоромеров и тягонапоромеров
Технические характеристики промышленных вакуумметров
5. Техника безопасности при контроле давления
Глава 9. Контроль расхода, количества и уровня
1. Общие сведения и классификация приборов
Технические характеристики ротаметров
Технические характеристики шариковых расходомеров
Технические характеристики счетчиков жидкостей и газов
4. Счетчики и весы твердых и сыпучих материалов
5. Уровнемеры жидкостей и сыпучих материалов
Технические характеристики поплавковых уровнемеров с пружинным уравновешиванием
Технические характеристики буйковых уровнемеров
6. Техника безопасности при контроле расхода, количества и уровня
Глава 10. Контроль специальных параметров
2. Контроль влажности и запыленности газа
3. Контроь влажности сыпучих материалов
4. Контроль плотности жидкости
5. Техника безопасности при контроле специальных параметров
Раздел III. Автоматическое управление, контроль и регулирование
Глава 11. Системы автоматики с программным управлением
1. Общие принципы построения систем
2. Интуитивный метод разработки схем управления
3. Аналитический метод разработки схем управления
Глава 12. Автоматическая блокировка и защита в системах управления
1. Системы автоматической блокировки
2. Системы автоматической защиты
Глава 13. Системы автоматического контроля и сигнализации
2. Измерительные системы с цифровым отсчетом
3. Системы централизованного контроля
4. Системы автоматической сигнализации
Глава 14. Системы автоматического регулирования
1. Основные понятия и определения
2. Обыкновенные системы регулирования
3. Самонастраивающиеся системы регулирования
4. Качественные показатели автоматического регулирования
Глава 15. Объекты регулирования и их свойства
2. Параметры объектов регулирования
3. Определение основных свойств объектов
1. Классификация автоматических регуляторов
2. Регуляторы прерывистого (дискретного) действия
3. Регуляторы непрерівного действия
4. Выбор типа регуляторов и параметров его настройки
Формулы для определения параметров настройки регуляторов
Глава 17. Конструкции и характеристики регуляторов
1. Регуляторы прямого действия
2. Электрические регуляторы косвенного действия
3. Гидравлические регуляторы косвенного действия
4. Пневматические регуляторы косвенного действия
5. Техника безопасности при эксплуатации регуляторов
Раздел IV. Микропроцессорные системы
Глава 18. Общая характеристика микропроцессорных систем
1. Основные понятия и определения
2. Организация работы вычислительной машины
Глава 19. Математическое и программное обеспечение микроЭвм
2. Правила перевода одной системы счисления в другую
3. Формы представления чисел в эвм. Машинные коды
Глава 20. Внешние устройства микроЭвм
1. Классификация внешних устройств
2. Внешние запоминающие устройства
3. Устройства для связи эвм – оператор
4. Внешние устройства связи эвм с объектом
Глава 21. Применение микропроцессорных систем
1. Состав систем автоматики с применением микроЭвм
2. Управление производственными процессами
Раздел V. Промышленные роботы и роботизированные системы
Глава 22. Общие сведения о промышленных роботах
1. Основные определения и классификация промышленных роботов
2. Структура промышленных роботов
3. Основные технические показатели роботов
Глава 23. Конструкции промышленных роботов
1. Промышленные роботы агрегатно-модульного типа
Технические данные агрегатной гаммы промышленных роботов лм40ц.00.00 [9]
Технические характеристики и области обслуживания типового ряда промышленных роботов [9]
Технические данные модулей агрегатной гаммы рпм-25 [9]
2. Интерактивные промышленные роботы
3. Адаптивные промышленные роботы
5. Приводы промышленных роботов
Глава 24. Системы управления промышленными роботами
1. Назначение и классификация систем управления
2. Унифицированные системы управления
Технические данные унифицированных систем управления уцм [9]
Технические данные унифицированных систем управления упм [9]
Технические данные контурных систем управления укм [9]
Глава 25. Роботизация промышленного производства
1. Основные типы роботизированных систем
2. Гибкие производственные системы с применением промышленных роботов
3. Техника безопасности при эксплуатации роботов
Приложение Буквенные обозначения элементов электрических схем
Глава 4. Переключающие устройства и распределители
1. Электрические реле
Реле являются одними из основных и наиболее ответственных элементов автоматических систем. Реле представляет собой коммутационное устройство, которое при воздействии каких- либо внешних факторов скачкообразно изменяет свое состояние. По виду физических величин, на которые реагируют реле, их делят на электрические, механические, магнитные, тепловые, оптические и др.
В конструкции любого электрического реле можно выделить пять основных функциональных элементов: воспринимающий, преобразующий, сравнивающий, исполнительный и регулирующий.
Воспринимающий и преобразующий элементы непосредственно реагируют на один из параметров тока и преобразуют его в механическую силу или другую физическую величину, необходимую для дальнейшей работы реле. Следовательно, воспринимающий и преобразующий элементы образуют преобразователь электрической энергии в механическую, т. е. представляют собой двигательный орган.
Сравнивающий элемент (у контактных реле – пружина), получив преобразованный сигнал, сравнивает его с заданным и в случае появления отклонения формирует команду на срабатывание.
Исполнительный элемент (обычно система контактов) при срабатывании реле воздействует на управляемую цепь, изменяя ее параметры, т. е. соединяет либо разъединяет два или несколько проводников электрической цепи.
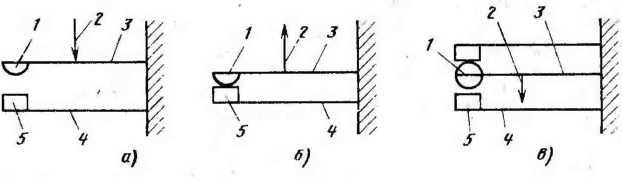
Рис. 19. Типы контактов реле:
а – замыкающие; 6 – размыкающие; в – переключающие; 1 – подвижный контакт;
2 – толкатель; 3 – контактная пружина; 4 – жесткая пружина; 5 – неподвижный контакт
Регулирующий элемент используют для настройки реле.
Различают три группы контактов реле: замыкающие (рис. 19, а), размыкающие (рис. 19, б) и переключающие (рис. 19, в).
Условия работы контактов прежде всего определяются напряжением в сети, мощностью и характером нагрузки, а также частотой коммутации, т. е. числом включений и отключений в единицу времени.
Конструктивное исполнение контактов отличается большим разнообразием, однако наибольшее распространение получили поворотные (рис. 20, а) и мостовые (рис. 20, б) контакты.
Основной характеристикой реле является статическая характеристика управления, показывающая зависимость выходной величины X от входной Y и имеющая для большинства реле гистерезисную форму. Вид характеристики зависит от типа реле (рис. 21, а-д).
Реле различных типов характеризуются также параметрами срабатывания и возврата, временами срабатывания и возврата и др.
Параметр срабатывания – минимальное значение »входного сигнала, при котором реле срабатывает, т.е., происходит переключение его контактов. Этот параметр характеризует чувствительность реле.
Параметр возврата – максимальное значение входного сигнала, при котором происходит возврат реле в исходное положение и размыкание контактов.
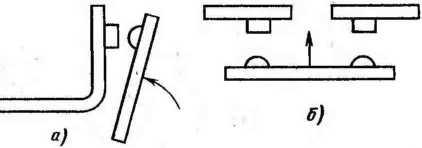
Рис. 20. Разновидности контактов:
а – поворотные; б – мостовые
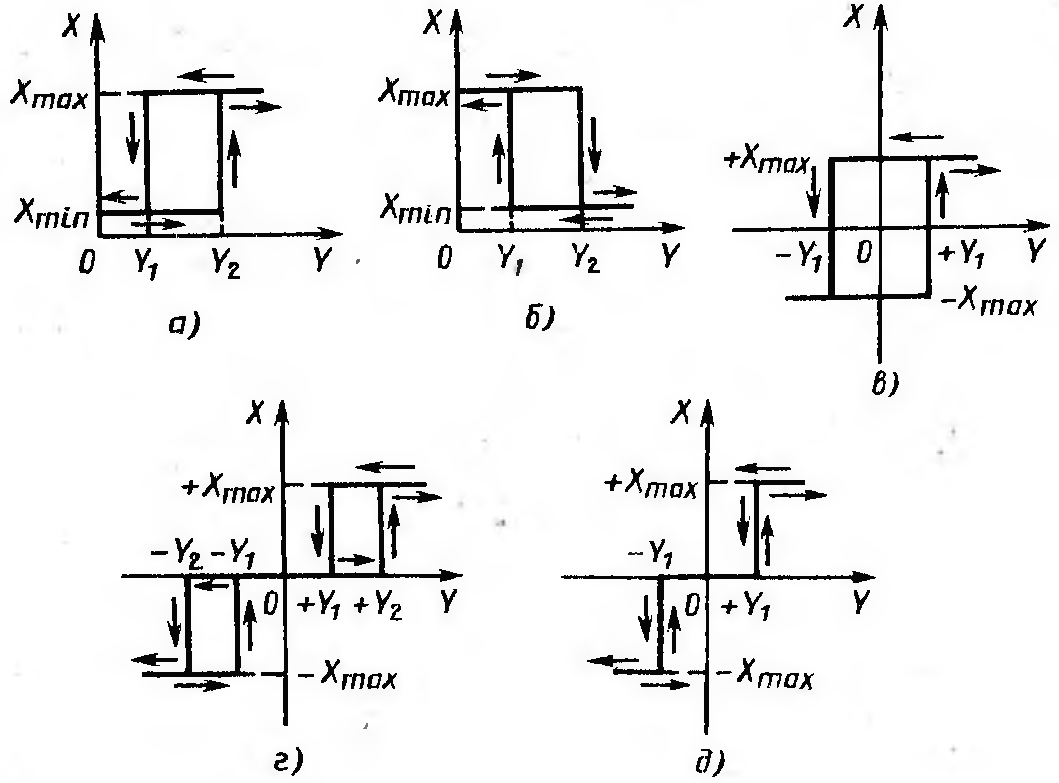
Рис. 21. Виды статических характеристик реле:
а и б – двухпозициониого неполяриэованного реле; в – двухпозициоиного с двумя устойчивыми состояниями; г и д – трехпозиционного
Время срабатывания ср – это интервал времени от момента подачи управляющего сигнала до момента появления сигнала в управляющей цепи. По времени срабатывания реле подразделяют на безынерционные (ср < 0,001 с), быстродействующие (ср < 0,05 с), нормальные (ср = 0,05 ... 0,25 с), замедленного действия [ср < (0,25 ... 1,0 с)], выдержки времени (ср > 1,0 с). Последние обычно называют реле времени.
Время возврата отп – интервал времени от момента снятия входного сигнала до момента прекращения воздействия исполнительного элемента на управляющую цепь.
Рабочий параметр – это установившееся значение входного параметра, при котором реле длительно находится во включенном состоянии и работает нормально, не перегреваясь.
Срок службы – допустимое число срабатываний реле (для различных реле число срабатываний может составлять от нескольких тысяч до десятков миллионов).
По назначению электрические реле делят на реле защиты, управления, автоматики, связи и т. п.
В реле защиты реализуются два способа воздействия на отключение выключателя: прямой и косвенный. В реле прямого действия исполнительный элемент воздействует непосредственно на отключающий механизм привода выключателя. Эти реле, как правило, монтируют в привод выключателя. К ним относятся встроенные реле типов РТМ (максимальное реле тока мгновенного действия), РТВ (максимальное реле тока с выдержкой времени) и РНВ (минимальное реле напряжения с выдержкой времени).
При срабатывании реле косвенного действия его контакты замыкают цепь оперативного тока, к которой подключена обмотка управления привода. Наиболее распространенными реле косвенного действия являются реле тока РТ‑40 и реле напряжения РН‑50.
Реле управления применяют для управления электроприводами (двигателями, электромагнитными тормозами и т. п.).
Реле автоматики используют в схемах автоматического управления. Это обычно электромагнитные реле постоянного тока, которые в зависимости от исполнения могут выполнять функции реле тока, напряжения, времени или промежуточных реле. Последние выполняют одну из трех функций: усилителя мощности, размножителя контактов или блокировки памяти.
По принципу работы электрические реле делят на электромеханические, статические и электротепловые.
Электромеханические реле подразделяют на электромагнитные, магнитоэлектрические, электродинамические и индукционные.
Электромагнитными реле называют реле, работа которых основана на воздействии магнитного ноля неподвижной обмотки на подвижный ферромагнитный элемент (якорь или мапштопровод с контактами). Эти реле бывают постоянного или переменного тока. Различают два вида реле постоянного тока: неполяризованные или поляризованные. Неполяризованиые реле работают независимо от полярности тока в обмотке. Поляризованные реле действуют только при определенной полярности.
Электромагнитные неполяризованиые реле по конструкции могут быть трех типов: с поворотным якорем, втяжным якорем и герметизированным магнитоуправляемым контактом (герконом).
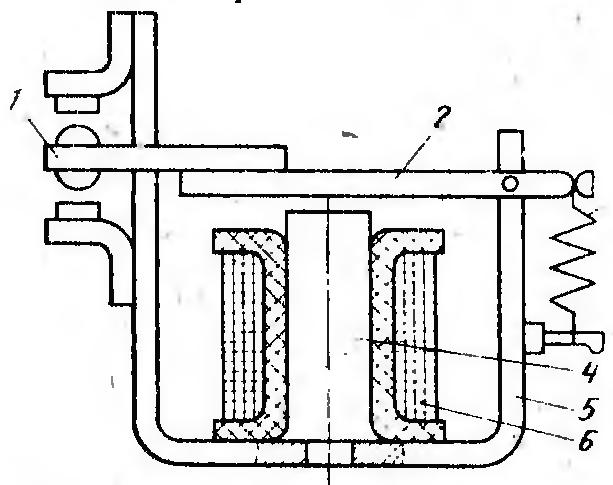
Рассмотрим более подробно работу электромагнитного реле с поворотным якорем (рис. 22). Средний контакт / смонтирован на якоре 2, шарнирно соединенном с магнитопроводом 5. При отсутствии питания (входного сигнала) в катушке 6 средний контакт 1 под действием пружины 3 прижат к верхнему контакту реле. При подаче питания (входного сигнала) на катушку 6 якорь 2 притягивается к стержню 4 и перебрасывает средний контакт 1 от верхнего контакта к нижнему. Этот этап работы называется срабатыванием. Реле можно использовать не только как переключающее, но и как размыкающее (средний контакт с верхним) и замыкающее (средний контакт с нижним) устройство.
|
|
|
|
|
Рис. 22. Электромагнитное реле |
Рис. 23. Герконовое реле |
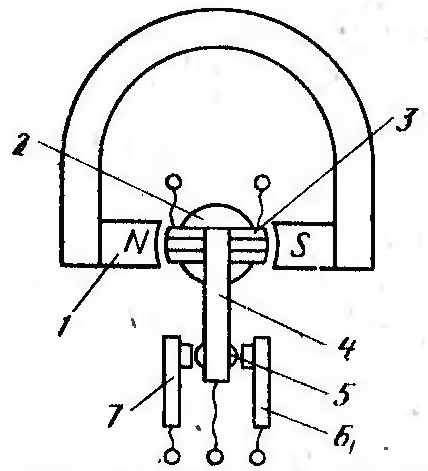
Рис. 24. Магнитоэлектрическое реле |
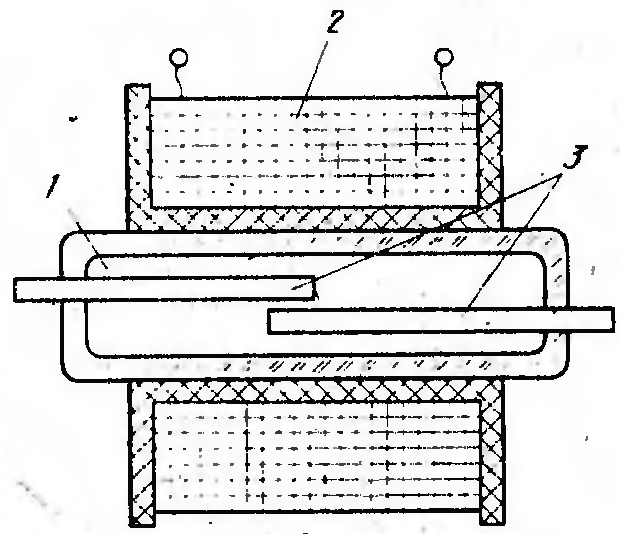
Герконовое реле имеет самую простую конструкцию (рис. 23). Геркон 1 (или герконы) размещается внутри катушки 2 (обмотки) реле. Геркон представляет собой стеклянный баллон, внутри которого впаяны контактные пружины 3 из магнитомягкого материала. Контактные пружины одновременно выполняют функции якоря, магнитопровода, контактов и возвратной пружины. Внутри баллона геркона создается либо вакуум, либо он заполняется азотом или аргоном. При подаче тока в обмотку реле возникает магнитный поток, который намагничивает контактные пружины. Между ними возникает электромагнитная сила, и контакты замыкаются. Реле с герконом отличается повышенной надежностью и большим быстродействием, чем реле с поворотным или втяжным якорем. Недостатками этих реле являются небольшая мощность и подверженность влиянию внешних магнитных полей, способных вызвать ложное срабатывание геркона.
Поляризованные реле в отличие от неполяризованных реагируют не только на силу, но и на направление (полярность) тока в обмотке. Поляризованное реле значительно чувствительнее неполяризованного, имеет меньшее время срабатывания и выдает полярный сигнал. Такие реле являются незаменимыми элементами автоматики в электрических следящих системах, где направление вращения электродвигателя определяется полярностью сигнала.
У электромагнитных реле переменного тока магнитопровод набирается из трансформаторной листовой стали с целью уменьшения потерь на вихревые токи. Для устранения вибрации контактов, вызываемой периодическим изменением силы и направления переменного тока; а следовательно, и усилия, создаваемого его магнитным полем, на торец магнитопровода насаживается медный короткозамкнутый виток. В остальном конструкция реле переменного тока аналогична конструкции реле постоянного тока.
Принцип работы магнитоэлектрических реле основан на взаимодействии магнитных полей неподвижного постоянного магнита и возбуждаемой током подвижной обмотки. Между полюсами постоянного магнита 1 (рис. 24) на оси расположен цилиндрический магнитопровод 2 с алюминиевой рамкой 3. На рамку намотана обмотка из тонкой проволоки. При подаче тока на рамку 3 вследствие взаимодействия магнитных полей она поворачивается, и якорь 4 замыкает контакт 5 с контактом 6 при одной полярности тока или с контактом 7 – при другой полярности. Вследствие того, что контакты должны иметь малую контактную силу (0,3 ... 1,0 Н), их выполняют из платины или платино-иридиевого сплава.
Магнитоэлектрические реле менее распространены, чем электромагнитные, вследствие большего времени срабатывания (ср = 0,1 ... 0,2 с), но имеют очень большую чувствительность (Рор = 10–10 Вт).
Электродинамические реле по принципу действия аналогичны магнитоэлектрическим, но магнитное поле в нем создается не постоянным магнитом, а специальной обмоткой возбуждения, размещенной на магнитопроводе.
Индукционные реле принадлежат к группе электромеханических реле, работа которых основана на взаимодействии переменных магнитных полей неподвижных обмоток с током, индуцированным этими полями в подвижном элементе. Они фактически являются примитивными электродвигателями переменного тока с однофазным питанием.
Основной особенностью статических реле является отсутствие каких-либо подвижных элементов (контактов). В зависимости от типа управляющего элемента, используемого в схеме, их делят на ферромагнитные, электровакуумные, ионные и полупроводниковые.
Ферромагнитное реле – статическое реле, работа которого основана на использовании нелинейной характеристики ферромагнитных материалов. Ионные и полупроводниковые реле реагируют непосредственно на силу тока или напряжение, под действием которых происходит скачкообразное изменение проводимости электронных, ионных или полупроводниковых элементов. Схемы этих реле основаны на схемах триггеров.
Триггер представляет собой электронную схему с релейными характеристиками, имеющими два устойчивых состояния. Переход из одного состояния в другое происходит под воздействием внешнего сигнала. В настоящее время наибольшее распространение получили триггеры на транзисторах.
Практические схемы транзисторных реле выполняют так, чтобы всякий раз управляющее напряжение или ток, достигнув некоторого фиксированного уровня – порога срабатывания (возврата), имело один и тот же знак. Транзисторное реле занимает вполне определенные исходные состояния при отсутствии управляющего воздействия.
Наибольшее распространение получили два варианта реле: с параллельной обратной связью по выходному напряжению (рис. 25, а) и с последовательной обратной связью по выходному току (рис. 25, б). В исходном состоянии схемы, показанной на рис. 25, а, транзистор V1 насыщен от источника питания через резистор Roс обратной связи и нагрузочный резистор Rн. Транзистор V2 заперт падением напряжения на диоде V3, входящем в состав делителя V3 – R2. Через резистор нагрузки Rн ток практически не проходит. Схема, приведенная на рис. 25, б, имеет противоположное исходное состояние. Транзистор V1 заперт напряжением обратной связи, а транзистор V2 насыщен от источника питания через резистор R1. Нагрузочный резистор соединен с источником питания.

