ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 20.07.2024
Просмотров: 742
Скачиваний: 0

СОДЕРЖАНИЕ
А.Г. Староверов основы автоматизации производства
Глава 1. Общие сведения о системах автоматики и составляющих ее элементах
1. Основные понятия и определения
2. Классификация систем автоматического управления
3. Элементы автоматических систем
Глава 2. Первичные преобразователи
1. Общие сведения и классификация первичных преобразователей
2. Потенциометрические первичные преобразователи
3. Индуктивные первичные преобразователи
4. Емкостные первичные преобразователи
5. Тензометрические первичные преобразователи
6. Фотоэлектрические первичные преобразователи
Глава 3. Усилители и стабилизаторы
2. Электромеханические и магнитные усилители
Глава 4. Переключающие устройства и распределители
3. Контактные аппараты управления
4. Бесконтактные устройства управления
Наименование н обозначение логических функций н элементов
Глава 5. Задающие и исполнительные устройства
1. Классификация задающих и исполнительных устройств
3. Электрические исполнительные механизмы
Раздел II. Контрольно-измерительные приборы и техника измерения параметров технологических процессов
Глава 6. Общие сведения об измерении и контроле
1. Основные метрологические понятия техники измерения и контроля
3. Методы измерения и классификация. Контрольно-измерительных приборов
1. Температурные шкалы. Классификация технических приборов и устройств измерения температуры
Технические характеристики стеклинных ртутных, термометров типа тт
Технические характеристики дилатометрических гермометров
Характеристики манометрических термометров
4. Термоэлектрические термометры
Основные характеристики термоэлектрических термометров
Технические характеристики милливольтметров
5. Термометры сопротивления и термисторы
Технические характеристики термометров сопротивления
6. Бесконтактное измерение температуры
7. Техника безопасности при контроле температуры
Глава 8. Контроль давления и разрежения
1. Общие сведения и классификация приборов
Технические характеристики показывающих и сигнализирующих манометров
Технические характеристики тягомеров, напоромеров и тягонапоромеров
Технические характеристики промышленных вакуумметров
5. Техника безопасности при контроле давления
Глава 9. Контроль расхода, количества и уровня
1. Общие сведения и классификация приборов
Технические характеристики ротаметров
Технические характеристики шариковых расходомеров
Технические характеристики счетчиков жидкостей и газов
4. Счетчики и весы твердых и сыпучих материалов
5. Уровнемеры жидкостей и сыпучих материалов
Технические характеристики поплавковых уровнемеров с пружинным уравновешиванием
Технические характеристики буйковых уровнемеров
6. Техника безопасности при контроле расхода, количества и уровня
Глава 10. Контроль специальных параметров
2. Контроль влажности и запыленности газа
3. Контроь влажности сыпучих материалов
4. Контроль плотности жидкости
5. Техника безопасности при контроле специальных параметров
Раздел III. Автоматическое управление, контроль и регулирование
Глава 11. Системы автоматики с программным управлением
1. Общие принципы построения систем
2. Интуитивный метод разработки схем управления
3. Аналитический метод разработки схем управления
Глава 12. Автоматическая блокировка и защита в системах управления
1. Системы автоматической блокировки
2. Системы автоматической защиты
Глава 13. Системы автоматического контроля и сигнализации
2. Измерительные системы с цифровым отсчетом
3. Системы централизованного контроля
4. Системы автоматической сигнализации
Глава 14. Системы автоматического регулирования
1. Основные понятия и определения
2. Обыкновенные системы регулирования
3. Самонастраивающиеся системы регулирования
4. Качественные показатели автоматического регулирования
Глава 15. Объекты регулирования и их свойства
2. Параметры объектов регулирования
3. Определение основных свойств объектов
1. Классификация автоматических регуляторов
2. Регуляторы прерывистого (дискретного) действия
3. Регуляторы непрерівного действия
4. Выбор типа регуляторов и параметров его настройки
Формулы для определения параметров настройки регуляторов
Глава 17. Конструкции и характеристики регуляторов
1. Регуляторы прямого действия
2. Электрические регуляторы косвенного действия
3. Гидравлические регуляторы косвенного действия
4. Пневматические регуляторы косвенного действия
5. Техника безопасности при эксплуатации регуляторов
Раздел IV. Микропроцессорные системы
Глава 18. Общая характеристика микропроцессорных систем
1. Основные понятия и определения
2. Организация работы вычислительной машины
Глава 19. Математическое и программное обеспечение микроЭвм
2. Правила перевода одной системы счисления в другую
3. Формы представления чисел в эвм. Машинные коды
Глава 20. Внешние устройства микроЭвм
1. Классификация внешних устройств
2. Внешние запоминающие устройства
3. Устройства для связи эвм – оператор
4. Внешние устройства связи эвм с объектом
Глава 21. Применение микропроцессорных систем
1. Состав систем автоматики с применением микроЭвм
2. Управление производственными процессами
Раздел V. Промышленные роботы и роботизированные системы
Глава 22. Общие сведения о промышленных роботах
1. Основные определения и классификация промышленных роботов
2. Структура промышленных роботов
3. Основные технические показатели роботов
Глава 23. Конструкции промышленных роботов
1. Промышленные роботы агрегатно-модульного типа
Технические данные агрегатной гаммы промышленных роботов лм40ц.00.00 [9]
Технические характеристики и области обслуживания типового ряда промышленных роботов [9]
Технические данные модулей агрегатной гаммы рпм-25 [9]
2. Интерактивные промышленные роботы
3. Адаптивные промышленные роботы
5. Приводы промышленных роботов
Глава 24. Системы управления промышленными роботами
1. Назначение и классификация систем управления
2. Унифицированные системы управления
Технические данные унифицированных систем управления уцм [9]
Технические данные унифицированных систем управления упм [9]
Технические данные контурных систем управления укм [9]
Глава 25. Роботизация промышленного производства
1. Основные типы роботизированных систем
2. Гибкие производственные системы с применением промышленных роботов
3. Техника безопасности при эксплуатации роботов
Приложение Буквенные обозначения элементов электрических схем
Пакетные переключатели и включатели открытого, защищенного и герметического исполнений предназначены для применения в цепях постоянного тока напряжением до 220 В и переменного тока напряжением до 380 В для ручного переключения цепей с силой тока от 6 до 400 А.
Путевые (конечные) выключатели – эхо аппараты, схожие с кнопкой управления, воздействие на контакты которых производится каким-либо рабочим механизмом при его движении. Их также называют конечными выключателями, если они установлены для контроля и ограничения положения движущегося механизма. Путевые выключатели по конструкции бывают контактными и бесконтактными. Последние отличаются высокой надежностью в работе. Контактные путевые выключатели бывают нажимными, рычажными или вращающимися.
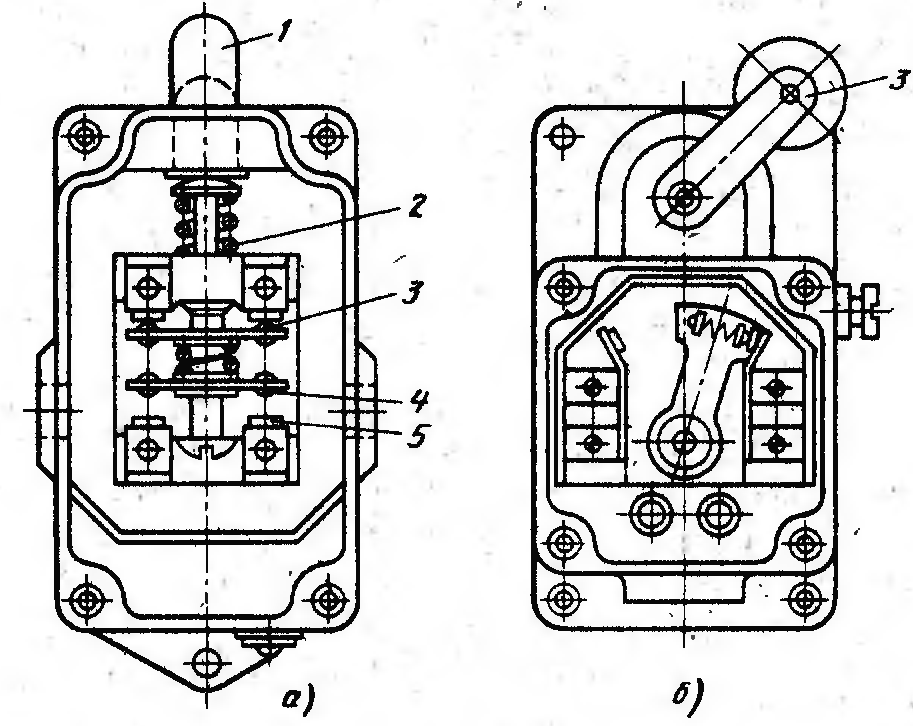
Рис. 29. Путевые (конечные) выключатели:
а – нажимной, б – рычажный
Нажимной путевой выключатель (рис. 29, а) имеет шток 1, при нажатии на который подвижные контакты 4 перемещаются от верхних неподвижных 3 к нижним неподвижным контактам 5. Возврат штока в исходное положение осуществляется пружиной 2.
Для нормальной работы такого переключателя скорость движения механизма или его движущегося узла должна быть более 6,6 мм/с. При меньшей скорости подвижные контакты перемещаются медленно, что приводит к длительному горению дуги, возникающей между размыкающимися контактами, и их быстрому разрушению вследствие оплавления н усиленного окисления.
В рычажном путевом выключателе (рис. 29, б) устройством, которое воздействует на подвижные контакты 1, является рычаг 3 с механизмом мгновенного переключения контактов 1 от одной пары неподвижных контактов 2 к другой. По окончании внешнего воздействия на рычаг под действием пружины контакты 1 и сам рычаг 3 возвращаются в исходное положение.
Контакты таких выключателей переключаются с постоянной скоростью при определенном положении рычага независимо от скорости движения механизмов. Поэтому их применяют при малых скоростях движения механизмов при требованиях повышенной точности срабатывания.
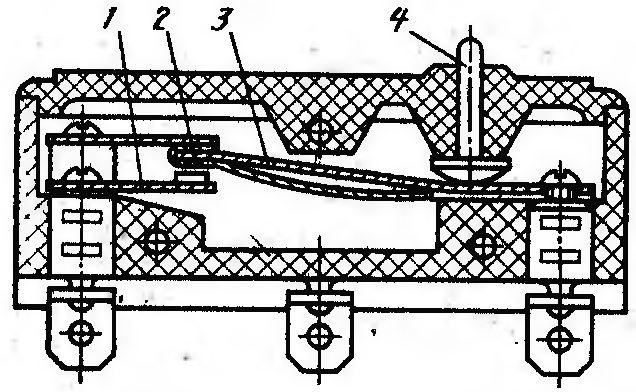
Рис. 30. Микропереключатель
В последнее время получили широкое распространение микропереключатели, одна из конструкций которых показана на рис. 30. При нажатии на шток 4 он давит на пружину 3. При определенной силе нажатия на шток пружина 3 перебрасывается по направлению движения штока, размыкая контакт 2 и замыкая контакт 1. Плоская пружина 3 выполнена из трех частей. Средняя часть длиннее крайних, поэтому она всегда находится в изогнутом состоянии и стремится прижать контакты в их крайних положениях (1 или 2). Несмотря на малые размеры переключатель работает при напряжении 380 В, токе до 3 А и силе нажатия на шток 5 ... 7 Н. Перемещение штока – в пределах 0,5 ... 0,7 мм. Время срабатывания микропереключателя 0,01 ... 0,02 с при частоте включений до 2 раз в минуту.
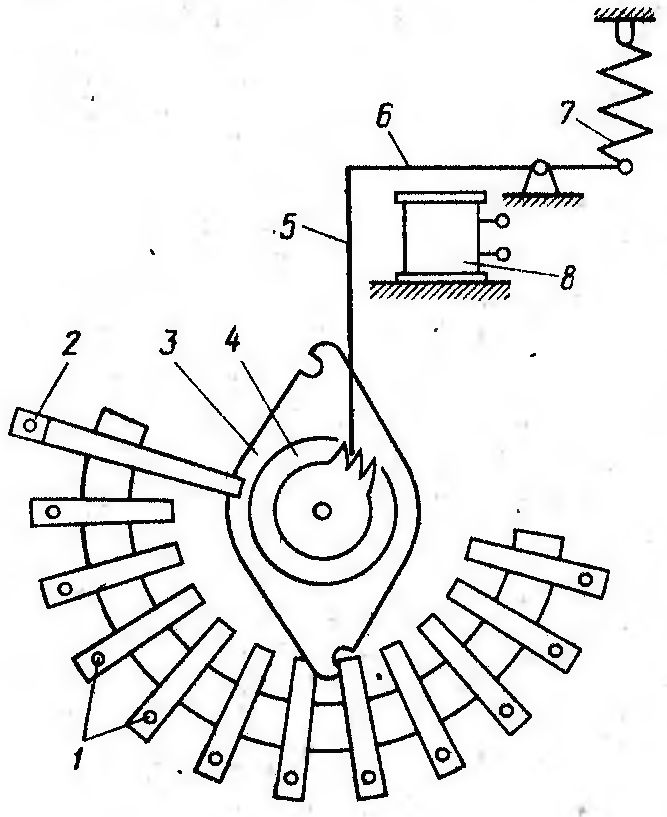
Рис. 31. Шаговый искатель
Шаговым искателем называют электромагнитный импульсный переключатель, предназначенный для поочередной коммутации большого числа контактных групп. Он (рис. 31) состоит из неподвижного контактного поля контактов 1, расположенных в несколько рядов и изолированных друг от друга, ротора со щетками 5 и электромагнитного привода. Электромагнитный привод содержит храповое колесо 4, собачку 5, якорь 6, возвратную пружину 7 и электромагнит 8. Каждый контактный ряд имеет свою щетку, соединенную через скользящий контакт 2 с выводом.
При подаче управляющего сигнала на обмотку электромагнита 8 якорь 6 притягивается к магнитопроводу, и собачка 5 толкает зуб храпового колеса 4, жестко соединенного с ротором, на котором установлены щетки. Ротор поворачивается и переводит щетки по неподвижным контактам. После снятия управляющего сигнала пружина 7 возвращает якорь в исходное положение.
Шаговые искатели различают: по емкости контактного поля, т. е. по числу пластин в ряду и числу неподвижных контактов; по характеру движения щеток (шаговые искатели бывают вращательные – ШИ, реверсивные – РШИ и подъемно-вращательные – ДШИ); по способу приведения щеток в движение; с приводом прямого действия (рабочее движение ротора происходит при притяжении якоря электромагнита) и обратного действия (движение ротора происходит при отпускании якоря под действием возвратной пружины).
Использование шаговых искателей для построения схем управления механизмами в литейных и термических цехах значительно упрощает эти схемы и увеличивает их надежность.
Под командоаппаратом понимается прибор, который автоматически подает импульсы (команды) для проведения технологических процессов по заранее установленному графику.
Командоаппарат состоит из следующих основных узлов: барабана, контактной рейки и плиты. Барабан представляет собой центральный вал на двух опорных подшипниках. На валу насажены переключающие шайбы, на которых закрепляются выключающие и включающие кулачки.
Схема действия одной контактной шайбы показана на рис. 32.
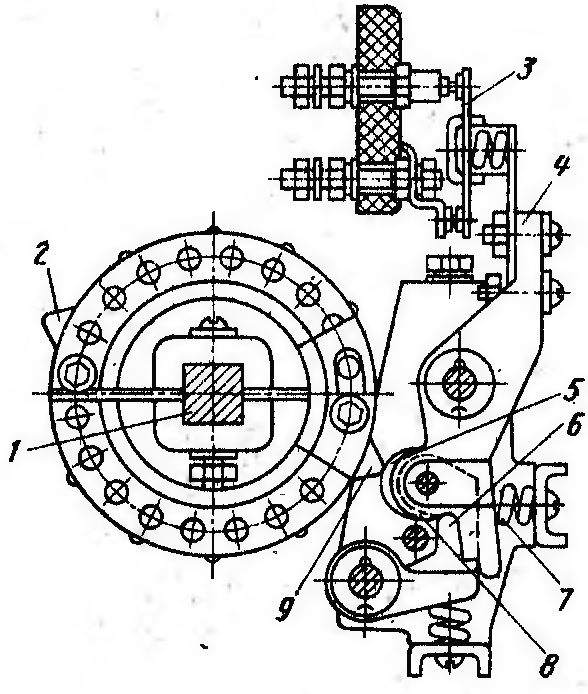
Рис. 32. Схема действия одной контактной шайбы командоаппарата
Контактная шайба с двумя кулачками, расположенными с двух сторон, жестко крепится на центральном валу 1. При вращении вала включающий кулачок 9 подходит к ролику 8 и, нажимая на него, поворачивает контактный рычаг 4, преодолевая сопротивление возвратной пружины 7. Контактный мостик 3 замыкает цепь. Одновременно отключающий рычаг 6 под действием пружины параллельно входит в вырез контактного рычага и удерживает его во включенном состоянии. При дальнейшем вращении шайбы отключающий кулачок 2 подходит к ролику 5 отключающего рычага 6 и нажимает на него. При этом отключающий рычаг освобождает контактный рычаг 4, который, поворачиваясь вокруг своей оси под действием возвратной пружины 7, мгновенно размыкает контакты. Для изменения длительности времени замкнутого состояния контактов, а также изменения момента включения кулачки 2 и 9 можно переставлять по окружности шайбы, для чего на шайбе имеются отверстия.
Кулачковые командоаппараты различают по числу барабанов (один или два) и по числу переключающих шайб (от 2 до 24).
Кулачковые командоаппараты предназначены для коммутации тока в цепях управления и применяется в автоматизированных электроприводах в качестве путевых или конечных выключателей. Контакты командоаппаратов допускают длительную нагрузку током 16 А и кратковременную (до 10 с) током 75 А.
Контакторы – это двухпозициоиные аппараты с самовозвратом, предназначенные. Для частых коммутаций токов, не превышающих токи перегрузки, « приводимые в действие приводом (встроенными электромагнитами) с дистанционным управлением. Контакторы в сочетании с защитными тепловыми реле называются пускателями.
Различают контакторы постоянного и переменного тока. Контакторы постоянного тока имеют, как правило, одну пару главных контактов, а контакторы переменного тока – три пары. Контакторы различаются: по конструкции электромагнита – с якорем клапанного типа и прямоходовым якорем; по способу гашения дуги – с магнитным гашением и дугогасительной решеткой; по допустимому числу срабатывания в час – от 240 до 1200 срабатываний.
Контактор переменного тока отличается от контактора постоянного тока числом главных контактов и конструкцией магнитной системы, которая набирается из отдельных изолированных друг от друга пластин стали.
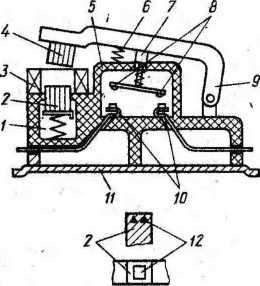
Рис. 33. Конструктивная схема контактора переменного тока
Контактор переменного тока с якорем клапанного типа показан на рис. 33. На металлическом основании 11 расположена контактная, дугогасительная, подвижная и электромагнитная системы. Принцип действия контактора состоит в том, что при подаче напряжения на катушку 3 тягового электромагнита якорь 4 притягивается к магнитопроводу 2, опирающемуся на демпфирующую пружину 1, и траверса 9 поворачивается. При этом подвижные контакты 8 замыкаются с неподвижным 10. Необходимое нажатие подвижных контактов обеспечивается пружиной 7. Катушка электромагнита питается переменным током, вследствие чего магнитный поток в электромагнитной системе контактора проходит через нуль. Это обстоятельство вызывает вибрацию и гудение магнитной системы. Для ослабления этих явлений на торце магнитопривода 2 закладывается медный короткозамкнутый виток 12. В момент, когда магнитный поток проходит через магнитопровод, в короткозамкнутом витке наводится ЭДС, как во вторичной обмотке трансформатора. Через виток проходит ток, который создает дополнительный магнитный поток, препятствующий отпадению якоря при переходе основного потока через нуль.
При снятии напряжения с катушки 3 пpoиcxoдит отключение контактора. При этом траверса под действием собственного веса и возвратной пружины 6 приходит в «нормальное» положение. Возникающая при расхождении главных контактов дуга от протекающего тока быстро гасится в дугогасительной камере 5.
Все контакторы переменного и постоянного тока должны надежно работать при колебаниях напряжения от 85 до 105 %.
Контакторы постоянного тока применяют в термических и литейных цехах для включения и выключения высокочастотных индукционных установок термических и плавильных печей, имеющих индуктивную нагрузку.
Контакторы переменного тока применяют для включения и выключения мощных термических и плавильных печей, а также различных установок с активной индукционной нагрузкой (индукционные нагревательные и плавильные печи).
Магнитные пускатели – это комплексные индукционные аппараты, предназначенные для пуска, отключения и защиты электродвигателей от перегрузок без выведения или введения в их силовые цепи резисторов. Реверсивный пускатель состоит из двух, а нереверсивный – из одного контактора и двух тепловых реле, смонтированных на общем основании или в общей защитной оболочке. Наибольшее распространение получили пускатели серий ПМЕ, ПАЕ и ПА.

