ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 20.07.2024
Просмотров: 700
Скачиваний: 0

СОДЕРЖАНИЕ
А.Г. Староверов основы автоматизации производства
Глава 1. Общие сведения о системах автоматики и составляющих ее элементах
1. Основные понятия и определения
2. Классификация систем автоматического управления
3. Элементы автоматических систем
Глава 2. Первичные преобразователи
1. Общие сведения и классификация первичных преобразователей
2. Потенциометрические первичные преобразователи
3. Индуктивные первичные преобразователи
4. Емкостные первичные преобразователи
5. Тензометрические первичные преобразователи
6. Фотоэлектрические первичные преобразователи
Глава 3. Усилители и стабилизаторы
2. Электромеханические и магнитные усилители
Глава 4. Переключающие устройства и распределители
3. Контактные аппараты управления
4. Бесконтактные устройства управления
Наименование н обозначение логических функций н элементов
Глава 5. Задающие и исполнительные устройства
1. Классификация задающих и исполнительных устройств
3. Электрические исполнительные механизмы
Раздел II. Контрольно-измерительные приборы и техника измерения параметров технологических процессов
Глава 6. Общие сведения об измерении и контроле
1. Основные метрологические понятия техники измерения и контроля
3. Методы измерения и классификация. Контрольно-измерительных приборов
1. Температурные шкалы. Классификация технических приборов и устройств измерения температуры
Технические характеристики стеклинных ртутных, термометров типа тт
Технические характеристики дилатометрических гермометров
Характеристики манометрических термометров
4. Термоэлектрические термометры
Основные характеристики термоэлектрических термометров
Технические характеристики милливольтметров
5. Термометры сопротивления и термисторы
Технические характеристики термометров сопротивления
6. Бесконтактное измерение температуры
7. Техника безопасности при контроле температуры
Глава 8. Контроль давления и разрежения
1. Общие сведения и классификация приборов
Технические характеристики показывающих и сигнализирующих манометров
Технические характеристики тягомеров, напоромеров и тягонапоромеров
Технические характеристики промышленных вакуумметров
5. Техника безопасности при контроле давления
Глава 9. Контроль расхода, количества и уровня
1. Общие сведения и классификация приборов
Технические характеристики ротаметров
Технические характеристики шариковых расходомеров
Технические характеристики счетчиков жидкостей и газов
4. Счетчики и весы твердых и сыпучих материалов
5. Уровнемеры жидкостей и сыпучих материалов
Технические характеристики поплавковых уровнемеров с пружинным уравновешиванием
Технические характеристики буйковых уровнемеров
6. Техника безопасности при контроле расхода, количества и уровня
Глава 10. Контроль специальных параметров
2. Контроль влажности и запыленности газа
3. Контроь влажности сыпучих материалов
4. Контроль плотности жидкости
5. Техника безопасности при контроле специальных параметров
Раздел III. Автоматическое управление, контроль и регулирование
Глава 11. Системы автоматики с программным управлением
1. Общие принципы построения систем
2. Интуитивный метод разработки схем управления
3. Аналитический метод разработки схем управления
Глава 12. Автоматическая блокировка и защита в системах управления
1. Системы автоматической блокировки
2. Системы автоматической защиты
Глава 13. Системы автоматического контроля и сигнализации
2. Измерительные системы с цифровым отсчетом
3. Системы централизованного контроля
4. Системы автоматической сигнализации
Глава 14. Системы автоматического регулирования
1. Основные понятия и определения
2. Обыкновенные системы регулирования
3. Самонастраивающиеся системы регулирования
4. Качественные показатели автоматического регулирования
Глава 15. Объекты регулирования и их свойства
2. Параметры объектов регулирования
3. Определение основных свойств объектов
1. Классификация автоматических регуляторов
2. Регуляторы прерывистого (дискретного) действия
3. Регуляторы непрерівного действия
4. Выбор типа регуляторов и параметров его настройки
Формулы для определения параметров настройки регуляторов
Глава 17. Конструкции и характеристики регуляторов
1. Регуляторы прямого действия
2. Электрические регуляторы косвенного действия
3. Гидравлические регуляторы косвенного действия
4. Пневматические регуляторы косвенного действия
5. Техника безопасности при эксплуатации регуляторов
Раздел IV. Микропроцессорные системы
Глава 18. Общая характеристика микропроцессорных систем
1. Основные понятия и определения
2. Организация работы вычислительной машины
Глава 19. Математическое и программное обеспечение микроЭвм
2. Правила перевода одной системы счисления в другую
3. Формы представления чисел в эвм. Машинные коды
Глава 20. Внешние устройства микроЭвм
1. Классификация внешних устройств
2. Внешние запоминающие устройства
3. Устройства для связи эвм – оператор
4. Внешние устройства связи эвм с объектом
Глава 21. Применение микропроцессорных систем
1. Состав систем автоматики с применением микроЭвм
2. Управление производственными процессами
Раздел V. Промышленные роботы и роботизированные системы
Глава 22. Общие сведения о промышленных роботах
1. Основные определения и классификация промышленных роботов
2. Структура промышленных роботов
3. Основные технические показатели роботов
Глава 23. Конструкции промышленных роботов
1. Промышленные роботы агрегатно-модульного типа
Технические данные агрегатной гаммы промышленных роботов лм40ц.00.00 [9]
Технические характеристики и области обслуживания типового ряда промышленных роботов [9]
Технические данные модулей агрегатной гаммы рпм-25 [9]
2. Интерактивные промышленные роботы
3. Адаптивные промышленные роботы
5. Приводы промышленных роботов
Глава 24. Системы управления промышленными роботами
1. Назначение и классификация систем управления
2. Унифицированные системы управления
Технические данные унифицированных систем управления уцм [9]
Технические данные унифицированных систем управления упм [9]
Технические данные контурных систем управления укм [9]
Глава 25. Роботизация промышленного производства
1. Основные типы роботизированных систем
2. Гибкие производственные системы с применением промышленных роботов
3. Техника безопасности при эксплуатации роботов
Приложение Буквенные обозначения элементов электрических схем
4. Выбор типа регуляторов и параметров его настройки
Применение регуляторов с различными характеристиками для одного и того же объекта приводят к разным результатам. Поэтому тип регулятора необходимо выбирать с учетом свойств объектов.
При отсутствии сведений о динамических свойствах объекта регуляторы следует выбирать по аналогии с действующими объектами или на основании предположительных сведений о свойствах объекта.
Выбор регулятора обычно начинают с определения характера его действия: позиционный, импульсный и непрерывный.
Позиционные регуляторы применяют в объектах с малым запаздыванием или постоянной нагрузкой. Они могут быть рекомендованы для одноемкостных объектов без самовыравнивания.
Например, многие электрические нагревательные печи оснащены двухпозиционными регуляторами температуры. Это объясняется их простотой при достаточной для многих процессов термической обработки точности поддержания заданной температуры нагрева. Точность регулирования температуры повышается при использовании трехпозиционных регуляторов. Однако двух- и трехпозиционное регулирование температуры малопригодно для газовых и мазутных печей, так как при полном выключении подачи топлива и воздуха в рабочем пространстве будут наблюдаться резкое падение давления и подсос холодного воздуха. Позиционные регуляторы могут быть использованы для регулирования давления в объектах с большой емкостью и малым запаздыванием.
Импульсные регуляторы применяют в объектах без большого запаздывания, обладающих средней емкостью при постоянной или плавно меняющейся нагрузке.
П-регуляторы рекомендуются для регулирования объектов, допускающих некоторые отклонения регулируемой величины от заданного значения. При этом нагрузка объектов не должна иметь резких колебаний, но может изменяться плавно. П-регуляторы большей частью используются для одноемкостных объектов.
И-регуляторы можно применять только при регулировании объектов с большой степенью самовыравнивания, иначе система может оказаться неустойчивой. Они используются с различной емкостью, с небольшим запаздыванием и при плавных изменениях нагрузки.
ПИ-регуляторы рекомендуются для регулирования процессов в самых разнообразных объектах, т. е. в объектах с любой емкостью, с большим запаздыванием и с большими, но медленно изменяющимися нагрузками. Например, их широко используют для регулирования температуры в топливных печах, а также для регулирования расхода газа или жидкости. Поскольку ПИ-регуляторы обладают достаточным быстродействием и способны выводить регулируемую величину на заданное значение, их применяют чаще других.
ПД-регуляторы используются в объектах со средней емкостью, при большом времени запаздывания и при малых изменениях нагрузки.
ПИД-регуляторы применяются в объектах с любой емкостью, с большим запаздыванием и при больших и резких изменениях нагрузки, т. е. в тех случаях, когда П- и ПИ-регуляторы не могут справиться с обеспечением требуемого Качества регулирования.
Рассмотренные рекомендации выбора регуляторов носят общий характер. Более точный выбор регулятора возможен лишь с учетом основных свойств объекта регулирования. Поэтому для действующих объектов при наличии кривых разгона или для проектируемых объектов, кривые разгона для которых сняты с действующих аналогов, выбор регуляторов производится на основании определенных расчетов.
Регулятор для объекта регулирования с известными основными свойствами выбирают следующим образом.
1. Должны быть известны или определены по кривой разгона основные параметры объекта: время полного запаздывания тп, постоянная времени объекта Т, степень самовыравнивания ρ и максимальное возмущение μ.
2. Характер действия регулятора определяется с помощью основного характеристического соотношения, т. е. отношения времени полного запаздывания т„ к постоянной времени объекта Т. Если τп/T < 0,2, то можно применять позиционный импульсный регулятор; если τп/Т > 0,2, то следует выбрать регулятор непрерывного действия. Далее все расчеты проводятся для регулятора непрерывного действия.
3. Задаются оптимальным характером типового переходного процесса. Рекомендуется задавать апериодический процесс, когда требуется исключить влияние регулирующего воздействия данной системы на другие регулируемые величины сложного объекта регулирования. Колебательный переходный процесс применяется в тех случаях, когда технологический процесс объекта допускает перерегулирование контролируемой величины.
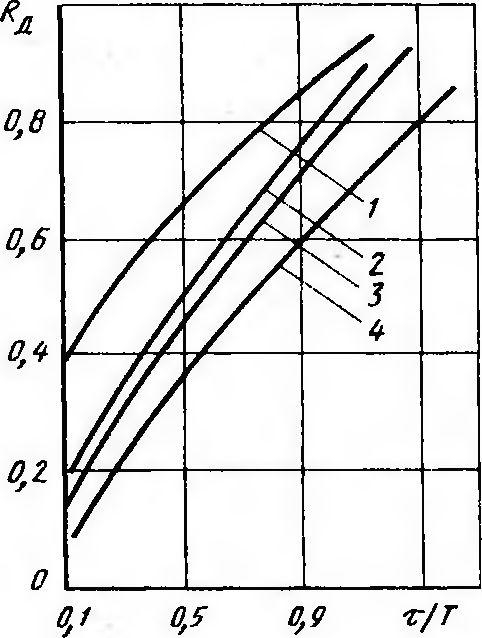
Рис. 131. Показатели различных типов регуляторов при 20 %-ном перерегулировании:
1 – И-регулятор; 2 – П-регулятор; 3 – ПИ-регулятор; 4 – ПИД-регулятор
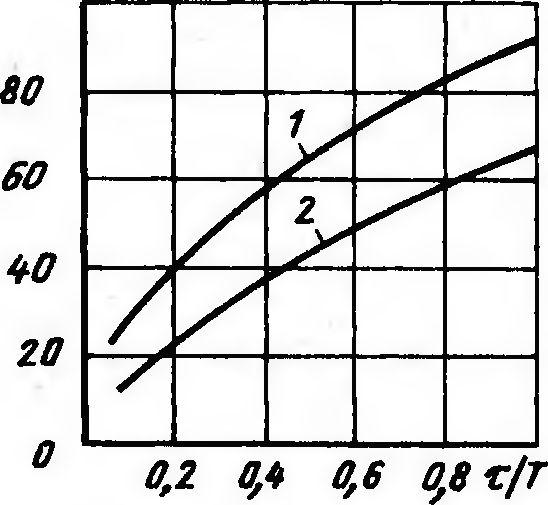
Рис. 132. Влияние характеристического отношения на остаточное отклонение:
1 – апериодический процесс; 2 – 20%-ное перерегулирование
4. Исходя из производственных условий, задаются допустимым динамическим отклонением Хх регулируемой величины и допустимым остаточным ее отклонением Хост по окончании переходного процесса.
5. Вычисляют динамический коэффициент регулирования Rn, который характеризует степень воздействия регулятора на потенциальное отклонение регулируемой величины (при отсутствии регулятора):
![]()
где
![]() –
коэффициент передачи объекта; Хн
и Х0 – конечное и данное
значения регулируемой величины; μ –
максимальное возмущающее воздействие
в % от хода регулирующего органа.
–
коэффициент передачи объекта; Хн
и Х0 – конечное и данное
значения регулируемой величины; μ –
максимальное возмущающее воздействие
в % от хода регулирующего органа.
6. По кривым, приведенным на рис. 131, выбирают тип регулятора непрерывного действия.
7. Для выбранного типа регулятора по кривым (рис. 132) определяют остаточное отклонение δ' в процентах, а затем рассчитывают ΔХост в единицах регулируемой величины по формуле
![]()
и сравнивают его с допустимым значением. Если Хост превышает допустимое значение, то следует выбрать другой тип регулятора.
Таблица 17
Формулы для определения параметров настройки регуляторов
|
Тип регулятора |
Типовой процесс регулирования |
|
|
Апериодический |
20 %-ное перерегулирование |
|
|
И-регулятор |
Кр = 1/(4,5КобТ) |
Кр= 1/(1,7КобТ) |
|
П-регулятор |
Кр= 0,3/(КобτТ) |
Кр = 0,71(КобτТ) |
|
ПИ-регулятор |
Кр = 0,6/(КобτТ); Тп = 0,67 |
Кр= 0,7/(КобτТ); Ти = 0,7Г |
|
ПИД-регулятор |
Кр = 0,95/(КобτТ); Ти= 2,4τ; Tп= 0,4τ |
Кр= 1,2/ (КобτТ); Ти – 2; τ; Тп – 0,4τ |
|
Примечание. В этих формулах Кр– коэффициент передачи регулитора; Тв – время изодрома; Тп – время предварения. |
||
Выбрав соответствующий тип регулятора, который обеспечивает его успешную работу в системе автоматического регулирования, приступают к определению оптимальных значений параметров настройки регулятора. Для регуляторов П- и И-типа параметром настройки является только коэффициент передачи регулятора Кр, для ПИ-регулятора в качестве второго параметра добавляется время изодрома Ти; для ПИД-регулятора учитывается еще третий параметр – время предварения Тп.
Определение оптимальных значений параметров настройки регуляторов возможно несколькими методами: с помощью расчета по приближенным формулам, по графическим зависимостям и путем организованного поиска.
Рассчитать оптимальные значения параметров настройки возможно, если известны конкретные величины свойств объектов регулирования: постоянная времени объекта Т, время запаздывания τп и коэффициент передачи объекта Коб.
Для различных типов регуляторов формулы расчета приведены в табл. 17.
Для определения значений параметров настройки с помощью графиков необходимо знать свойства объекта: постоянную времени объекта Т, время полного запаздывания τп и коэффициент передачи объекта Коб.
Графики строят в логарифмических координатах. По осям абсцисс откладывают характеристическое отношение τп/Т, по осям ординат – значения настройки параметров регуляторов.
В методе организованного поиска оптимальная настройка параметров определяется путем экспериментального исследования систем автоматического регулирования, состоящей из объекта регулирования и выбранного регулятора.
Контрольные вопросы и задания
1. Какое устройство называется регулятором?
2. По каким признакам можно классифицировать регуляторы?
3. Как работают позиционные регуляторы?
4. Какие вы знаете регуляторы непрерывного действия?
5. Как работают П- и И-регуляторы?
6. Как работают ПИ и IIИД-регуляторы?
7. Что такое закон регулирования?
8. Изложите общие рекомендации по выбору регуляторов различных типов.
9. Какие параметры настройки используются для регуляторов непрерывного действия?
10. Изложите общие принципы определения оптимальных иастроек регуляторов непрерывного действия.

